关于一种无轨锻造操作机升降倾斜机构的优化分析
2016-06-27韩浩然翟富刚
韩浩然 冯 伟 翟富刚
(1. 二重集团(德阳)重型装备股份有限公司重型机械工程公司,四川618000;2. 哈尔滨工业大学机电工程学院,黑龙江150000;3. 燕山大学机械工程学院,河北066004)
设计
关于一种无轨锻造操作机升降倾斜机构的优化分析
韩浩然1冯伟2翟富刚3
(1. 二重集团(德阳)重型装备股份有限公司重型机械工程公司,四川618000;2. 哈尔滨工业大学机电工程学院,黑龙江150000;3. 燕山大学机械工程学院,河北066004)
摘要:本文例举了一种锻造操作机升降倾斜机构,该机构尤其适用于无轨锻造操作机。对升降轨迹进行数学建模和运动仿真,得出升降过程中相关杆件的关系方程组。在工程设计上,给定一定杆件尺寸时,能计算出剩余杆件的长度和位置,在符合精度的条件下,保证升降过程中轨迹更接近于直线。通过多组参数分析对比,得出其精度控制规律。该分析结果对于锻造操作机的结构设计和优化具有指导意义。
关键词:锻造操作机;升降倾斜机构;垂直升降;轨迹优化
国民经济的飞速发展,带动了我国国防科技、电力电气、航空航天、船舶车辆以及应用于农业、道路、建筑等领域的机械制造业蓬勃发展。各个领域的机械设备都向着集成化、巨型化、精密化、自动化等方向高速发展,对大型自由锻件在规格、质量和数量上要求更加严格。怎样在安全环保和舒适的劳动条件下提高劳动生产率和经济效益成为当下摆在自由锻件生产行业的一个亟待解决的课题。锻造操作机作为与大中型锻造压机配合使用的辅助机械,具有精密、高速、重载、智能、柔性等特点,对锻造生产效率和锻件质量的提高以及改善锻造作业环境和节能减排起到了至关重要的作用。
现有的无轨锻造操作机倾斜升降机构有悬吊式、下托式、惠尔曼式、塞克式、摆动杠杆式、机械式、倒置式和倒平行四边形式等。查阅现有的国内外无轨锻造操作机[1-10],发现在升降过程中所有的锻造操作机都很难保持轨迹的完全竖直,而这一缺陷会大大降低锻造工艺的精度,从而严重阻碍锻造技术的发展,尤其是在重型锻造操作设备上,该缺陷会更加明显,微小的弧度反应在锻件上就可能会有数十毫米的误差。
1一种新型锻造操作机升降倾斜机构
为了克服上述现有技术的不足,本文例举了一种结构简单、紧凑,运动可靠性强,同步性好的锻造操作机升降倾斜机构,该机构已申请并获得国家发明专利(授权公告号:CN 104014706 B)。
该倾斜升降机构尤其适用于无轨锻造操作机,主要由升降机构和倾斜机构组成,其特征在于机架由一对平行四边形机构的四个平行杆分别和一对倒三角形架的四顶点相连。三角形架顶边四顶点通过两对等长的悬挂杆与夹钳主轴相连形成平行四边形机构,与机架平行四边形机构下端相连的一对杆作为倾斜缸,一对上连接杆中部通过同步杆相连,升降缸铰接于同步杆中部,兼垂直缓冲功能,水平缓冲缸位于后悬挂杆的某一位置,该机构以夹钳主轴为中心对称分布。
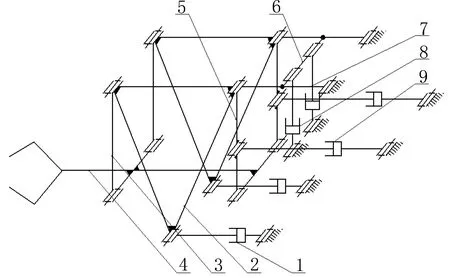
锻造操作机升降倾斜机构外形和结构示意图分别如图1和图2。图2中,倾斜缸1、三角形架2和上连接杆7组成平行四边形机构,倾斜缸1和上连接杆7与机架相连,上连接杆中部通过同步杆6相连,升降缸8与同步杆6中部铰接,夹钳主轴4通过一对前悬挂杆3和一对后悬挂杆5形成一对平行四边形机构,与三角形架2上方两对顶点铰接。缓冲缸9与后悬挂杆5某位置铰接。
当实现升降功能时,倾斜缸1锁死,且与连接杆7等长,形成平行四边形机构,升降缸8驱动。
当实现倾斜功能时,升降缸8锁死,缓冲缸9长度不变,所以后悬挂杆5被锁死,倾斜缸1运动时,前悬挂杆3和后悬挂杆5形成的平行四边形机构使夹钳主轴4绕后悬挂杆5下铰接点旋转。
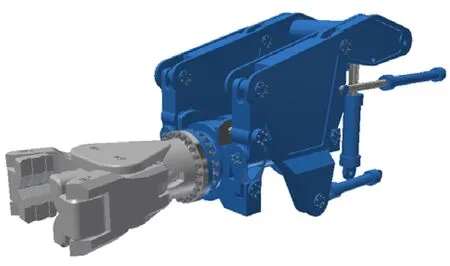
图1 锻造操作机升降倾斜机构外形示意图
1—倾斜缸 2—三角形架 3—前悬挂杆 4—夹钳主轴
2升降轨迹竖直的优化分析
2.1建模仿真
通过建模仿真发现,在设计完成其他杆件的长度之后,通过控制水平缓冲缸的长度和位置得到不同的升降运动轨迹。当水平缓冲缸的长度由短变长时,可知夹钳的运动轨迹逐渐由凸弧变为一条在一定竖直范围内的近似直线。当水平缓冲缸的长度继续变长时,夹钳的运动轨迹由近似直线逐渐变为凹弧。当水平缓冲缸的位置由低变高时,可知夹钳的运动轨迹逐渐由凸弧变为一条在一定竖直范围内的近似直线。当水平缓冲缸的位置继续向上移动时,夹钳的运动轨迹由近似直线逐渐变为凹弧。即该轨迹在缓冲缸位置和长度的变化过程中呈现由凸弧到凹弧的渐变。
通过初步分析得到结论:必有一组缓冲缸的长度和位置使得升降轨迹为近似直线。
通过对关键杆件的分析得出,夹钳的运动轨迹与后悬挂杆下端点的运动轨迹相同,相当于一个曲柄摇杆机构的外延端点轨迹。建立以上连接杆和机架的铰接点为原点的直角坐标系。
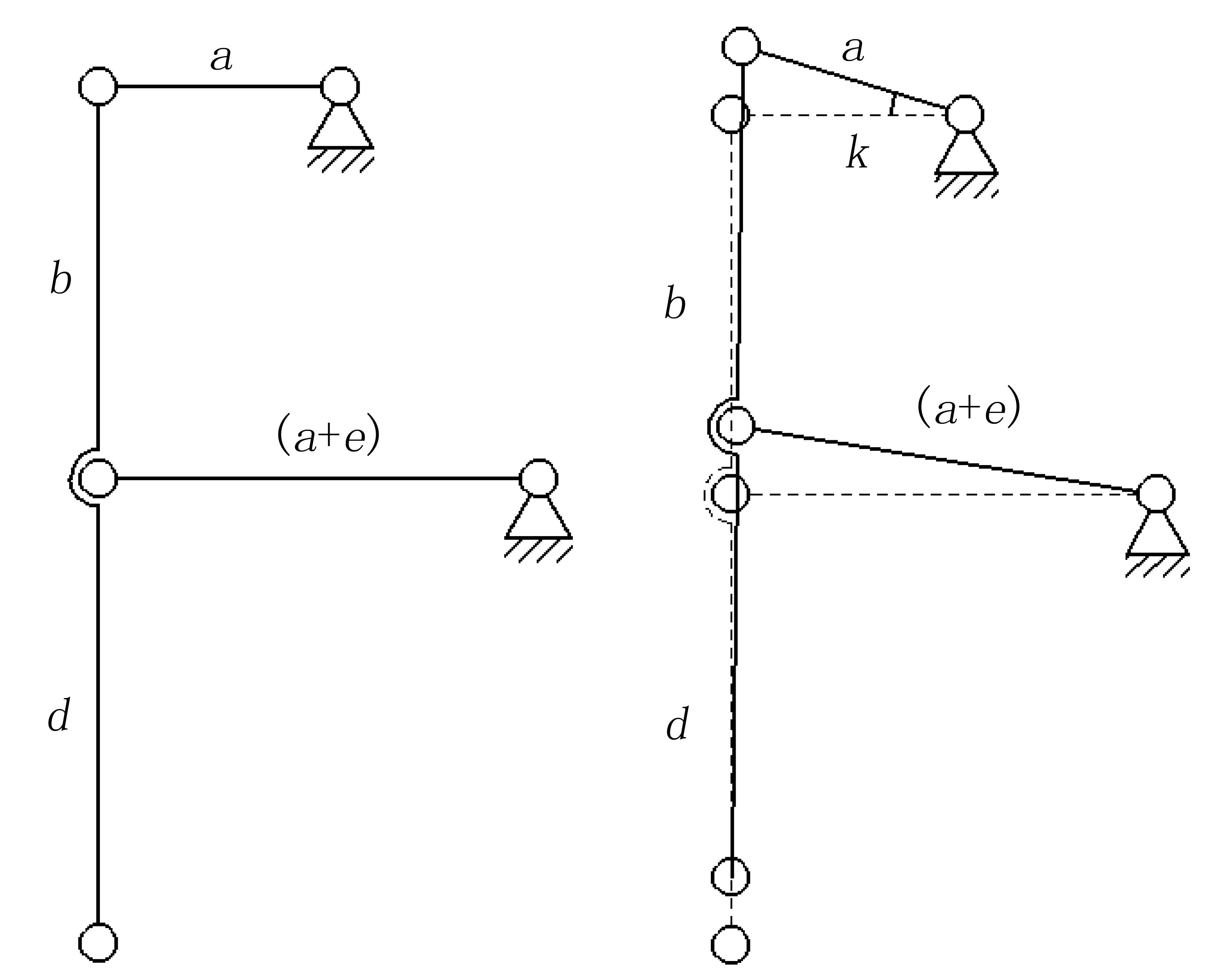
图3 升降动作相关杆件机构简图
图3中a为上连接杆长度,b为后悬挂杆上部长度,d为后悬挂杆下部长度。在该结构模型中,设定初始条件为上连接杆以及缓冲缸都处于水平状态。
对机构进行几何分析,首先假定后悬挂杆下端点做直线运动,即为理想状态,可以建立此状态下机构运动的方程组为:
式中,把a,b,d这三个杆长设为已知量,即由锻造操作机机械结构设计而得;n为后悬挂杆下端点的纵向坐标;x为后悬挂杆和缓冲缸铰接点的横向坐标;y为后悬挂杆和缓冲缸铰接点的纵向坐标;k为上连接杆相对于横轴的转向角,在该方程组分析中为控制变量;e为缓冲缸和机架铰接点的横向坐标,为该方程组主要分析对象。
MATLAB是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境。本文中利用MATLAB的相关功能解方程组,并编写优化设计程序。
利用MATLAB解方程组(1),可得e的表达式为:e=f(a,b,d,k) 。
在表达式中,可知a,b,d为给定值。设定k为控制变量,k的取值范围通过夹钳上下移动范围而定。依照k取定不同的值,可得出e的一组值。
继续对此机构进行几何分析,可得方程组
(x+acosk)2+(y-asink)2=b2


(2)
在方程组(2)中,m为后悬挂杆下端点的横坐标,是本方程组主要分析对象。e为控制变量。利用MATLAB解方程组(2),可得m及n的表达式为:
m=f(a,b,d,k,e)
n=f(a,b,d,k,e)
对于e的某个取值,通过k值即上连接杆的角度的变化,可得出m的一组取值,即为后悬挂杆下端点的横向坐标取值,同样可得n的一组取值,即为后悬挂杆下端点的纵坐标的变化。要控制本机构后悬挂杆下端点的运动曲线近似为直线,需要控制m值的变化范围。根据机构设计,当k为0时,m为-a,因而取p=|m+a|,即p为控制误差,应依据工艺要求在设计阶段给定此值。
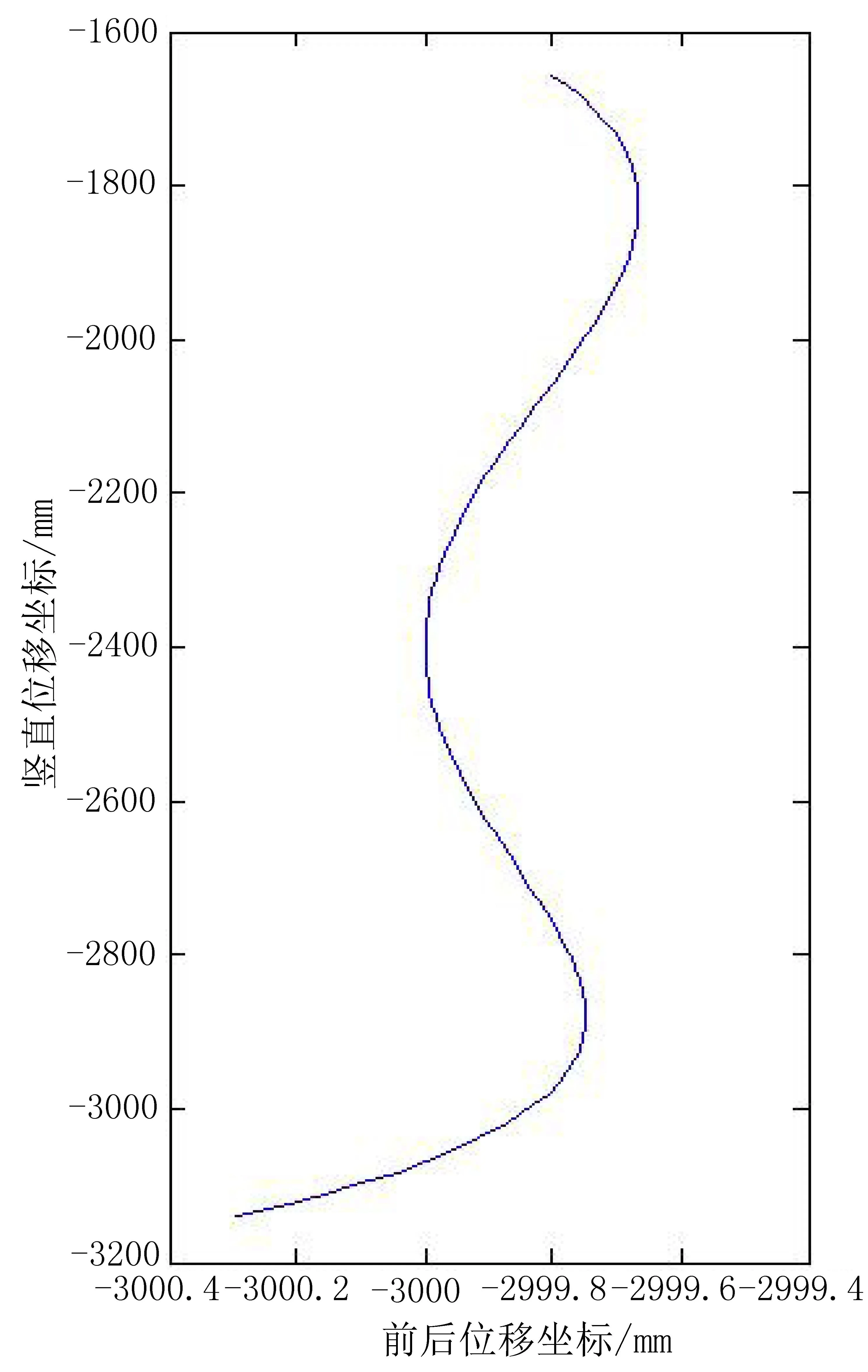
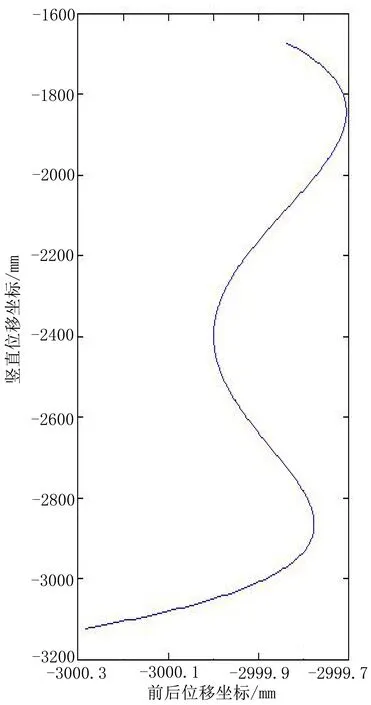
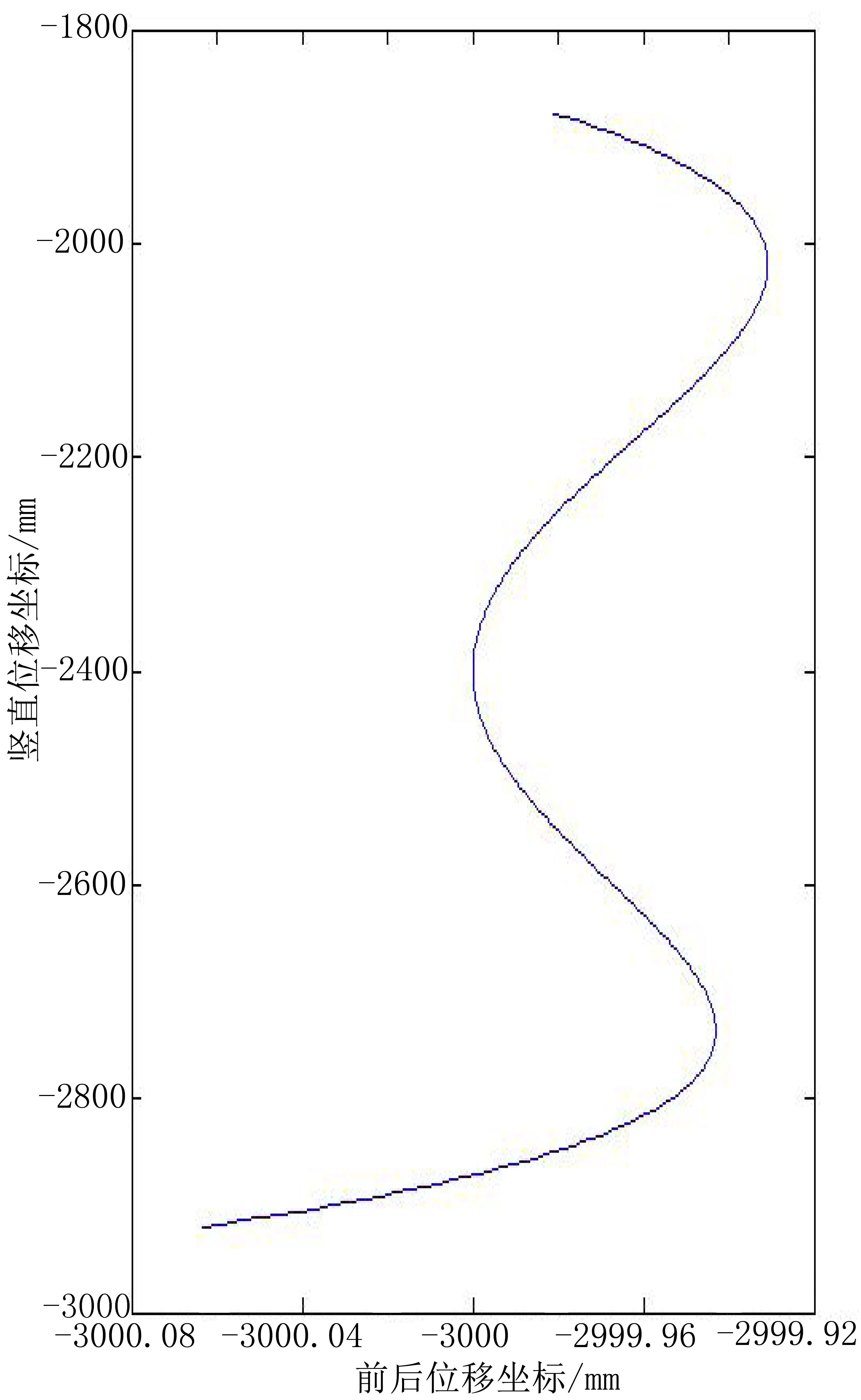
经过以上分析,可以给出一种优化设计方法,即首先根据工艺要求确定夹钳的升降范围,得出k的取值范围。取k的一组值,依据e=f(a,b,d,k) 可得出e的一组取值。将e的所有取值依次代入m=f(a,b,d,k,e)中,针对e的每一个值可得到一组m值,必须使其满足|m+a| 2.2验证 2.2.1行程为1 400 mm,p=0.5 mm 依据上述思路,编写了相应的MATLAB程序,并代入数据进行验证。试设计一台20 t的无轨锻造操作机,根据技术要求以及结构设计取a=3 000 mm,b=1 100 mm,d=1 300 mm(见图3),升降行程为1 400 mm,则取上连接杆上下俯仰角为-14° 图4 升降行程为1 400 mm,p=0.5 mm时 由图4可得,在其技术要求的升降范围内(-3 100 mm~ -1 700 mm),后悬挂杆下端点的轨迹为近似直线,其最大偏差小于p(p=0.5 mm),满足设计要求。 2.2.2升降行程为1 400 mm,p=0.3 mm 再次运行程序,依旧输入相应的杆长数值,以及角度,但这次我们提高精度要求,使p=0.3 mm,输入p的数值后运行程序,这次得到e的取值范围是e=2 483.31 mm~2 483.84 mm,取e的值为2 483.50 mm,再次代入程序,可得后悬挂杆下端点运动轨迹,如图5所示。 图5 升降行程为1 400 mm,p=0.3 mm时 由图5可得,在其技术要求的升降范围内(-3 100 mm~ -1 700 mm),后悬挂杆下端点的轨迹为近似直线,其最大偏差小于p(p=0.3 mm),满足设计要求。 再次运行程序,依旧输入相应的杆长数值,以及角度,再次提高精度要求,使p=0.1 mm,输入p的数值后运行程序,这次程序并未返回任何e的取值,说明此系统不可能达到p=0.1 mm的精度要求,同样对于p=0.2 mm也没有e的返回值,说明此系统在此误差精度范围内的极限误差为p=0.3 mm。 2.2.3升降行程为1 000 mm,p=0.08 mm 下面减小操作机的升降行程,将其升降行程降为1 000 mm,则取上连接杆上下俯仰角度为-10° 图6 升降行程为1 000 mm,p=0.08 mm时 由图6可得,在其技术要求的升降范围内(-2 900 mm~ -1 900 mm),后悬挂杆下端点的轨迹为近似直线,其最大偏差小于p(p=0.08 mm),满足设计要求。 通过对上述模型的求解以及制图可知减小行程可以显著地减小操作机进行竖直动作时的误差,因此可以针对不同的工作要求(具体细化为不同的升降工作范围),设置不同的e值,可以显著地提高动作精度。 该方法亦可通过已得方程组,在给定e和(b+d)值的情况下,确定b或d的取值。即给定缓冲缸的长度,求出其在后悬挂杆上最佳安装位置,以保证升降轨迹的直线近似度。过程与求e值类似,只需对程序稍加改动即可。 从数学建模的角度出发,反映出各个相关杆件与轨迹近似竖直之间的关系,通过编程可以直接应用于设计实际,解决工程问题。 3结论 本文例举了一种无轨锻造操作机升降倾斜机构,具有结构简单、紧凑,运动可靠性强,同步性好,视野广阔,承载能力强,调整好水平缓冲缸的位置和长度,能实现升降轨迹近似于竖直等特点。通过数学分析其升降动作的运动轨迹得出相关杆件的关系公式,经验证明得出其优化曲线为一条近似直线,在给定误差和技术要求的情况下通过编程得出一组最优解,同时通过多组数据的对比分析,得出在技术要求升降行程减小的情况下,能进一步降低升降过程中的水平误差,对该机构的锻造操作机的优化设计具有直接的实际意义,对相似机构的锻造操作机也具有很高的参考价值。 参考文献 [1]张营杰, 卫凌云, 牛勇, 韩炳涛. 锻造操作机发展现状与研究方向[J]. 锻压装备与制造技术, 2012, (2): 11-13. [2]万胜狄. 锻造机械化与自动化[M]. 北京: 机械工业出版社, 1983: 169-172. [3]余发国. 锻造操作机的设计原理研究[D]. 秦皇岛: 燕山大学工学博士学位论文, 2009: 3-4. [4]王飞宇. 重载锻造操作机设计机理及动态特性研究[D]. 重庆大学工学硕士学位论文, 2012:1-7. [5]Rail Forging Manipulators. http://www.sms-meer.com/pro-dukte. [6]Dango & Dienenthal Forging Manipulator. http://www.dds-gmbh.com. [7]Manipulators-Forging. http://www.wepuko.com/wpe-manipulators. [8]GLAMA Rail-Bound Forging Manipulator. http://www.glama.de. [9]QKKRailForgingManipulators. http://www.zdas.cz/en/content.aspx?catid=8. [10]Rail Forging Manipulators. http://www. tkpo.ryazan.ru/index_e.htm. [11]韩木林,吴顺达. 锻造行业节能减排技术措施及发展方向研究[J]. 锻压装备与制造技术, 2010(5): 15-20. [12]Nowitzki, Werner. Manipulators with mass division increase throughput and save energy in high-precision forging[J]. MPT Metallurgical Plant and Technology International, 2008, 31(5):46-48. [13]王勇勤, 熊乙锟, 严兴春, 韩炳涛, 等. 锻造过程中DDS操作机动力学特性研究[J].锻压技术, 2012,37 (6):156-161. [14]许允斗. 基于并联机构理论大型锻造操作机设计与分析[D]. 燕山大学工学博士论文, 2012. [15]刘杰, 基于虚拟样机的锻造操作机阀控马达系统仿真研究[D]. 燕山大学硕士论文.2010. [16]Fu Xin, Xu Ming, Wang Wei, Zou Jun, et al. Hydraulic system design and simulation of the forging manipulator[J]. Journal of Mechanical Engineering, 2010, 46(11):49-54. [17]Yan Changya, Gao Feng, Zhang Yong. Kinematic modeling of a serial-parallel forging manipulator with application to heavy-duty manipulations[J]. Mechanics Based Design of Structures and Machines, 2010, 38(1):105-129. [18]夏峰. 国产化最大吨位600 t·m全液压操作机在烟台顺利投产[J].锻压技术, 2012,37 (1):90. [19]张寅, 孔祥东, 翟富刚, 艾超. 200 kN液压锻造操作机监控系统研究[J].锻压技术, 2013,38 (2):90-93. [20]姚静. 锻造油压机液压控制系统的关键技术研究[D]. 秦皇岛: 燕山大学工学博士学位论文, 2008. [21]刘琳琳, 王艾伦, 马强, 杨相稳. 卸荷溢流阀动态特性的数字仿真研究[J].机床与液压, 2006, (9): 124-126. [22]孔祥东, 权凌霄, 姚静, 阚超, 等. 基于力学分析的蓄能器数学模型建立及实验研究[J]. 机床与液压, 2006, (7): 31-33. [23]孔祥东, 翟富刚, 张杨, 庞逢祥,等. 锻造操作机夹钳平行升降机构运动学分析[J]. 燕山大学学报, 2011,35(3):198-202. [24]冯志军. 浅谈溢流阀故障及排除方法[J]. 液压气动与密封, 2006, (4): 50-51. [25]宫燃. 传动装置动密封失效分析及试验研究[D]. 杭州: 浙江大学工学博士学位论文, 2008. 编辑陈秀娟 Analysis on Optimization of Lifting and Tilting Mechanism for a Trackless Forging Manipulator Han Haoran, Feng Wei, Zhai Fugang Abstract:A kind of forging manipulator lift and tilting mechanism has been enumerated in the paper, and it is especially suitable for a trackless forging manipulator. Relation formula of related rods in the lifting process has been obtained by making mathematical modeling and movement simulation on the lifting trajectory. When a certain dimension of rod is given in engineering design, the length and location of the residual rod can be calculated, and it can be ensured that the trajectory is close to the straight line during lifting under the condition of accuracy. The accuracy control law has been obtained by comparing multiple sets of parameters. The analysis results have guiding significance for the structure design and optimization of forging manipulator. Key words:forging manipulator; lifting and tilting mechanism; vertical lift; trajectory optimization 收稿日期:2015—12—02 作者简介:韩浩然(1991—),男,本科,助理工程师。电话:15283885889,E-mail:haoran1005@qq.com 中图分类号:TH113.2 文献标志码:A