半主动连通式油气悬架精确反馈线性化控制
2016-06-23曹旭阳操林林王殿龙
曹旭阳 操林林 王殿龙
大连理工大学, 大连, 116024
半主动连通式油气悬架精确反馈线性化控制
曹旭阳操林林王殿龙
大连理工大学, 大连, 116024
摘要:利用微分几何法将连通式油气悬架非线性系统模型精确线性化,建立了半主动连通式油气悬架精确反馈线性化控制系统,利用AMESim和MATLAB/Simulink对半主动连通式油气悬架进行了联合仿真。仿真结果表明,半主动连通式油气悬架与被动悬架相比,较好地改善了上车的振动性能,缩短了连通式油气悬架在受冲击作用时的稳定时间,减小了悬架上车的瞬时冲击的最大值,提高了悬架的减振能力和抗侧倾能力。半主动连通式油气悬架改善了悬架动挠度,使悬架动挠度过渡平缓,降低了瞬时波动强度。
关键词:半主动;连通式油气悬架;非线性;联合仿真
0引言
油气悬架是由油液传递压力,气体作为弹性介质的一种悬架,广泛应用于军用车辆、工程机械、矿用自卸车和农业机械[1-2]。按照车桥悬架油缸是否互连,可以把油气悬架分为独立式油气悬架和连通式油气悬架,连通式油气悬架由于可以实现左右悬架油缸油液的相互流动,从而可以大大提高悬架的侧倾角刚度[3]。
相对于主动油气悬架,半主动油气悬架结构简单、耗能低、实现方便,且性能优于被动油气悬架,因此得到国内外学者的广泛关注[4-5]。目前半主动油气悬架的控制策略主要包括天棚阻尼控制[6]、模糊控制[7]、最优控制[8]、自适应控制[9]、神经网络控制[10]等。对于油气悬架的主动或半主动控制,大多数学者以独立悬架为研究对象,并不涉及左右悬架油缸之间的油液流动问题,且控制变量较少,系统相对简单。史俊武等[11]利用微分几何法实现了导弹发射车油气悬架的精确线性化,并得到了较好的主动控制效果,但其并不涉及左右悬架油缸连通问题。王洪礼等[12]应用微分几何理论对主动悬架进行了控制研究,采用高次多项式拟合非线性弹性力与阻尼力,但是未给出力发生器模型。么鸣涛等[13]利用微分几何法实现了半主动油气悬架的精确线性化,并且利用线性二次型调节器实现了非线性状态反馈最优控制,但是其悬架模型比较简单,与实际液压悬架模型有一定差距。方新[14]等分析了阻尼孔大小对连通式油气悬架性能的影响,阻尼孔越小可越快速消除悬架的振动,但是在复原行程中,为了减小油缸小腔憋压和复原行程的加速度,又要求阻尼孔越大越好,由于被动油气悬架无法实现阻尼孔的实时调节,因此难以解决上述问题。为此,本文根据悬架的振动性能,实时调整阻尼孔大小,以适应悬架不同的工作状态。由于要同时调整两个阻尼孔的大小,因此,该悬架半主动控制系统是一个典型的多输入多输出(MIMO)非线性系统,本文采用微分几何法将连通式油气悬架非线性系统精确线性化,设计了精确反馈线性化控制系统,实现了对连通式油气悬架的半主动控制,通过AMESim和MATLAB/Simulink软件的联合仿真实验,验证了系统的有效性。
1连通式油气悬架系统建模
连通式油气悬架左右两侧悬架油缸的无杆腔和有杆腔通过油路互连,当悬架向一侧倾斜时,由于重力作用倾斜侧承受更多的附加力,迫使倾斜侧悬架油缸压缩,而另一侧由于液压油向有缸腔流动,同样会使其相对压缩,这样悬架的重心降低,从而提高了悬架的抗侧倾能力。
1.1连通式油气悬架动力学建模
图1所示为连通式油气悬架的动力学模型,主要由左右侧悬架油缸、上车、左右侧下车以及液压回路组成。左右两侧的蓄能器主要为悬架系统提供油气弹力,阻尼孔的作用是消除振动,单向阀的作用是在悬架受到冲击作用的时候,能及时为有杆腔补油。图1中,pl、pr、pl1、pr1、pl2、pr2、pl3、pr3分别为液压悬架系统各个位置的压力,lg1、lg2分别为各段管路的长度,dg1、dg2和Ag1、Ag2为对应管路的内径和通流截面积,mlw、mrw为左右悬架下车承载质量,mb为上车承载质量,Fl、Fr分别为左右悬架的油气弹力,zlr、zrr为左右路面干扰,zlw、zrw为左右悬架下车振动位移,zb为上车振动位移,θ为上车的侧倾角,Kt为下车弹簧刚度,g为重力加速度,a为上车左右悬架油缸两支点间距离的一半,J为上车转动惯量。系统动力学公式如下:
(1)
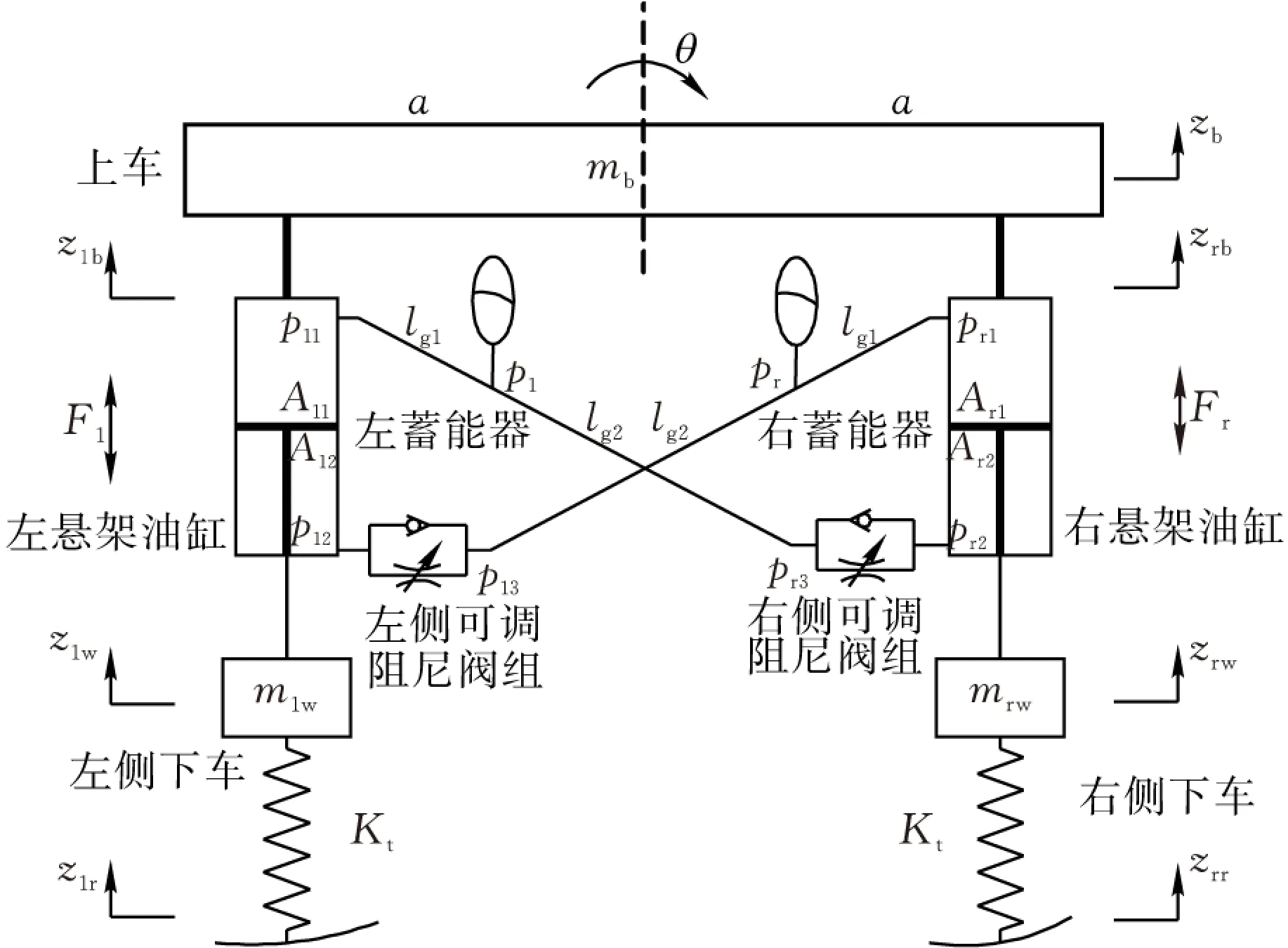
图1 连通式油气悬架动力学模型
1.2连通式油气悬架非线性系统模型
对左右悬架油缸进行分析,有
Fl=pl1Al1-pl2Al2
(2)
Fr=pr1Ar1-pr2Ar2
(3)

考虑管路沿程损失,由流体力学相关知识可得[15]
(4)
(5)
(6)
(7)
其中,zlb、zrb分别为悬架上车左右两侧的振动位移,v1、v2分别为左右两侧悬架油缸和活塞的相对运动速度,vl1g、vr1g和vgr3、vgl3分别为左右悬架油缸无杆腔到蓄能器和蓄能器到可调阻尼阀各段管路内油液流速,λl1g、λgl3、λr1g、λgr3为各段管路的沿程阻力系数,具体根据符号下标与各段管路内油液流速相对应。

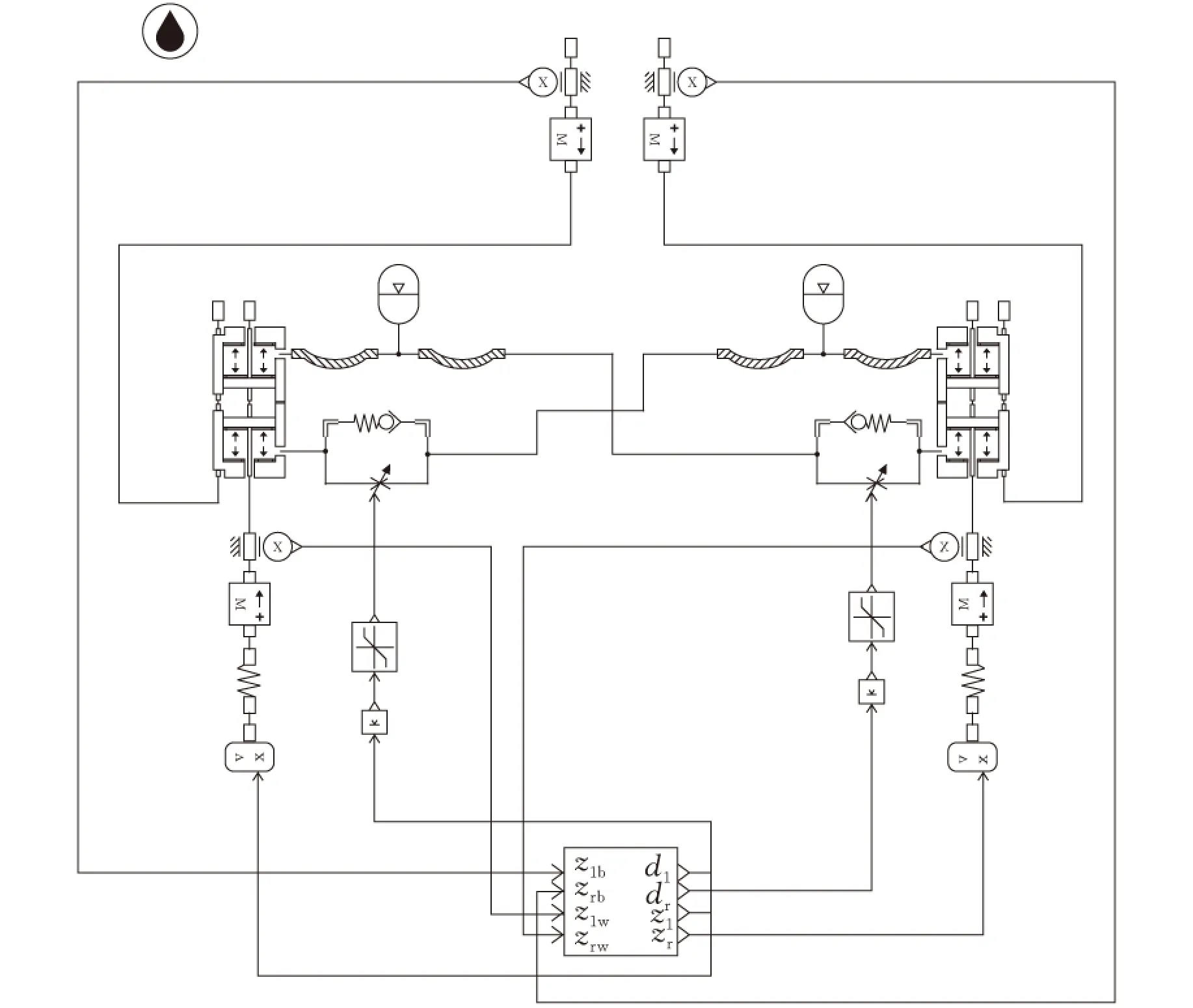
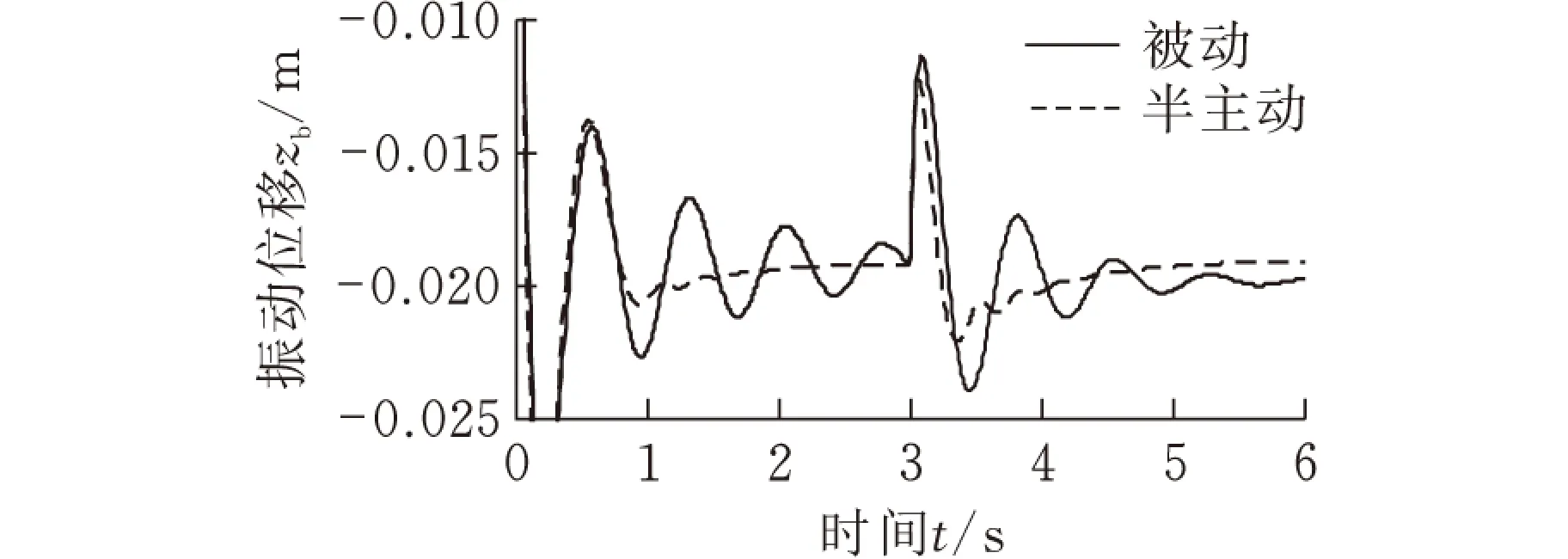
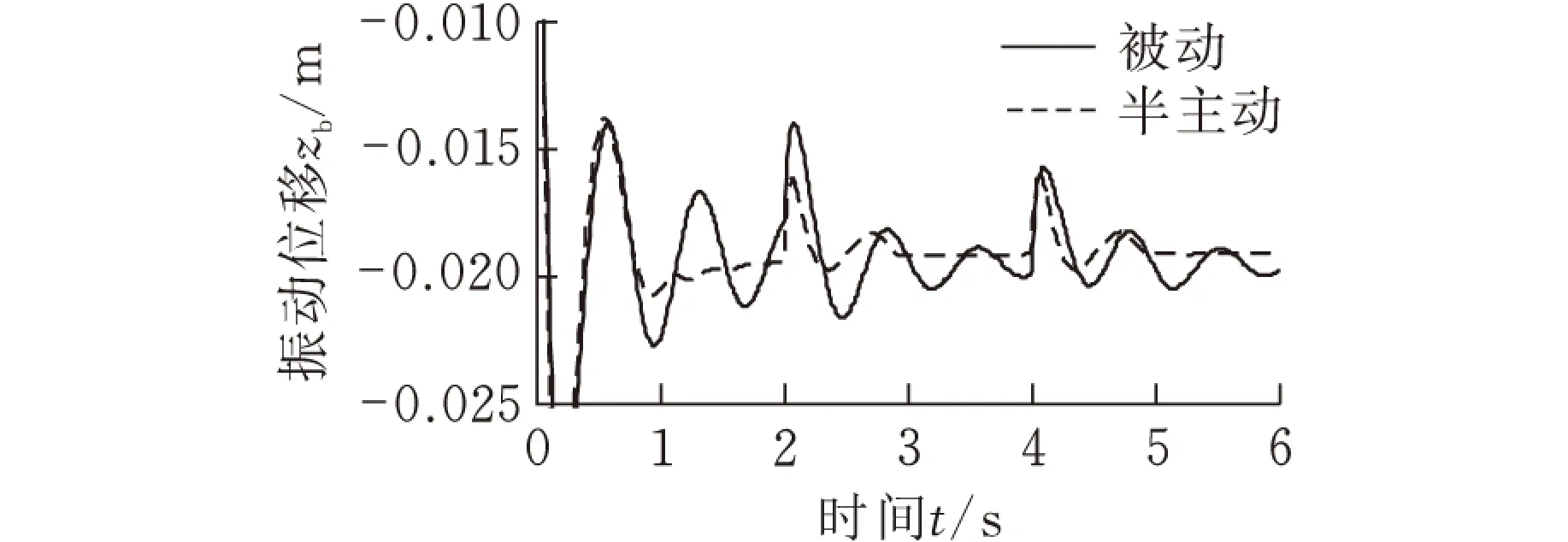
其中,D、d分别为悬架油缸有杆腔直径和无杆腔直径。一般油气悬架系统的管路中雷诺数Re不会超过105[14],因此,管路中阻尼考虑了两种状态:Re≤2000和2000 其中,vg为管路内液体流速,dg为管路内径,μ为液压油运动黏度,m2/s,在北方用32号液压油,在南方用46号液压油。 软管沿程阻力系数可由下式确定[3]: 其中,Δ为管壁表面粗糙度,橡胶软管Δ取0.03mm,Δ/d为管壁的相对粗糙度。 左右两侧蓄能器和悬架油缸相互连通,在忽略油液的可压缩性条件下,总的油液体积是一定的。对左侧蓄能器进行分析,当悬架处于振动状态时,忽略温度变化,蓄能器内的气体瞬时压力pl可用理想气体状态方程描述[16-18],即 (8) 式中,pl、Vl分别为左侧蓄能器瞬时压力和瞬时气体体积;pj、Vj分别为悬架处于平衡状态时的蓄能器压力和气体体积;r为气体多变指数。 蓄能器内气体体积为 Vl=Vj-(zlw-zlb)A1+(zrw-zrb)A2 (9) 联立式(8)、式(9)得左侧蓄能器瞬时压力为 (10) 同理,右侧蓄能器瞬时压力为 (11) 式中,pr、Vr分别为右侧蓄能器瞬时压力和瞬时气体体积。 对单向阀和阻尼孔进行分析,将阻尼孔和单向阀间的油液流动简化为小孔节流作用,根据小孔节流理论[15],可得 (12) (13) 式中,cz、cd分别为阻尼孔和单向阀的流量系数;Alz、Arz分别为左右阻尼孔开口面积;Ad单向阀开口面积;ρ为液压油密度。 联立式(2)~式(13),可得左右油气悬架输出力Fl和Fr: (14) (15) 其中 (16) (17) (18) (19) 由式(18)和式(19)可知,ψ1和ψ2为常量。并且从式(14)、式(15)中可以看出左右两侧油气弹簧的输出力分别受到对侧蓄能器的影响,从而也说明连通式油气悬架两侧油气弹簧存在很强的耦合作用。接下来将以u1和u2为控制变量对连通式油气悬架进行精确反馈线性化控制研究。然后,通过式(16)、式(17)反求得到实时状态下的阻尼孔大小,最终实现对联通式油气悬架的半主动控制。 1.3连通式油气悬架精确线性化 采用非线性系统精确线性化的微分几何法对半主动连通式油气悬架系统进行精确线性化。 选取状态变量 路桥施工技术与其质量控制是非常重要的,为减少公路桥梁维修成本打下坚实而有力的基础,对于行人的安全提供了重要保障,减少了桥梁断裂和路面崩塌这样的小概率危险性事件的发生,社会对于桥梁质量的高度认可,还可以增加其施工企业在这一行业的名气与信誉度[1]。 (x1,x2,x3,x4,x5,x6,x7,x8)= 从而,可将状态空间方程表示为下式所示的仿射非线性形式[11-12]: (20) 为了能够实现系统输入-输出的线性化,选取输出变量x5、x7,即上车的振动位移和侧倾角,从而有 根据非线性系统的解耦条件,选取反馈变换[19-20]: (21) A(x)= (22) (23) 求解式(23)得 M=Vj-(x1-x5-ax7)A1+(x3-x5+ax7)A2 N=Vj-(x3-x5+ax7)A1+(x1-x5-ax7)A2 整理式(21)~式(23)可得线性系统方程: (24) 将上述线性系统用状态空间描述如下: (25) 其中,z为干扰输入向量。 2半主动连通式油气悬架精确反馈线性化控制 图2 连通式油气悬架精确反馈线性化控制框图 图2为连通式半主动油气悬架精确反馈线性化控制框图,系统主要分为逆变器、解耦器、连通式油气悬架三个部分。由式(24)可以看出,半主动连通式油气悬架反馈线性化后不但实现了输入输出间的线性化,而且实现了两个输出的完全解耦,从而原系统被分解成两个完全独立的线性子系统。线性系统中新的控制变量ν1、ν2与系统输出y5、y7之间有着二重积分的关系,而y5、y7分别为悬架上车的振动位移和侧倾角,即控制变量ν1、ν2的大小将直接影响着上车振动加速度和侧倾角加速度,因此系统选用上车振动加速度和侧倾角加速度的理想值作为控制输入,以二者的实际值作为反馈,通过PID调整后,再结合式(23),即可实现对连通式半主动油气悬架的精确反馈线性化控制。 2.2半主动连通式油气悬架仿真实验 图3 连通式油气悬架AMESim仿真模型 图4 连通式油气悬架Simulink仿真模型 为了验证控制系统的有效性,采用AMESim和MATLAB/Simulink对半主动连通式油气悬架进行联合仿真。图2中连通式油气悬架采用AMESim建模,模型如图3所示,由于在AMESim中很难同时表示出上车垂直方向的振动和附加的侧倾运动,因此将上车简化为左右两部分,侧倾角则可用上车左右两部分的相对运动间接表示。控制系统在Simulink中建模,如图4所示。路面激励采用“等腰三角形凸块”[14],凸块高40 mm,宽400 mm,车速为60 km/h。仿真数据采用LTM1500全路面起重机的油气悬挂参数,其主要参数见表1。 2.3仿真结果对比分析 2.3.1同一时刻干扰作用下仿真结果对比分析 图5所示为基于精确反馈线性化及PID控制的半主动连通式油气悬架与被动连通式油气悬架在左右悬架同时受干扰作用时上车振动位移、速度和加速度对比曲线。从图5中可以看出,经半主动控制后的连通式油气悬架能够快速达到平衡,且消减了瞬时冲击。通过对数据进行分析,上车的瞬时冲击位移由-0.0114 m变化到-0.0123 m,之所以为负值,是由于重力作用下,悬架整体下降,最终平衡在-0.019 m的位置,最大振幅分别为7.6 mm、6.7 mm,降幅为11.8%。振动速度由0.19 m/s降低到0.17 m/s,降幅为10.5%。振动加速度最大值由17.92 m/s2降低到12.89 m/s2,降幅为28%。 表 1 仿真参数 (a) 上车振动位移 (b) 上车振动速度 (c) 上车振动加速度图5 上车振动性能对比曲线(同一时刻干扰作用下) 图6、图7分别为左右悬架同时受干扰作用时下车的振动加速度和悬架动挠度对比曲线。由于加速度反映了下车的受力情况,所以对于下车的振动,在此更关注其加速度的大小。通过图6可以看出,半主动控制的连通式油气悬架在受冲击作用时,冲击加速度的振幅由被动时的66.8 m/s2降低到60.0 m/s2,降幅为10.2%。悬架动挠度的大小,反映了车辆的舒适性,从图7中可以看出,经半主动控制后的连通式油气悬架与被动油气悬架相比,其动挠度过渡平缓,波动小,性能较好。 图6 下车振动加速度(同一时刻干扰作用下) 图7 悬架动挠度(同一时刻干扰作用下) 2.3.2不同时刻干扰作用下仿真结果对比分析 图8所示为基于精确反馈线性化及PID控制的半主动连通式油气悬架与被动连通式油气悬架上车的振动性能对比曲线。从图8可以看出,经过半主动控制后的连通式油气悬架的上车振动性能相对于被动油气悬架的上车振动性能明显得到了改善,在一定程度上消减了瞬时冲击作用,并明显缩短了悬架在受干扰作用后的稳定时间。从数值上看,在2 s和4 s时刻,悬架受冲击后的振动位移的振幅由被动油气悬架的3.8 mm、2.35 mm降低到1.85 mm、1.9 mm,降幅为51%和19%;冲击加速度的最大值则分别由被动悬架的7.67 m/s2、8.2 m/s2降低到7.65 m/s2、5.7 m/s2,2 s时刻基本上持平,4 s时刻降幅为30.1%。 (a)上车振动位移 (b)上车振动速度 (c)上车振动加速度图8 上车振动性能对比曲线(不同时刻干扰作用下) (a)侧倾角位移 (b)侧倾角加速度图9 悬架上车侧倾角性能对比曲线 图9所示为基于精确反馈线性化及PID控制的半主动连通式油气悬架与被动连通式油气悬架上车的侧倾角位移和侧倾角加速度对比曲线。图9a表明,半主动控制的连通式油气悬架相对于被动式油气悬架并没有消减悬架冲击瞬间的侧倾角最大位移,但是明显缩短了上车侧倾角的稳定时间。侧倾角加速度对比曲线表明,半主动控制的连通式油气悬架明显消减了冲击瞬间的侧倾角加速度,在2 s和4 s时刻的冲击中,悬架的侧倾角加速度分别由被动时的-9.5 rad/s2、8.4 rad/s2变化到-7.4 rad/s2、6.9 rad/s2,降幅分别为22%和17.9%。由于侧倾角加速度反映了悬架受到的惯性侧倾力矩,侧倾角加速度越大车辆越容易倾覆,从而说明,基于精确反馈线性化及PID控制的半主动连通式油气悬架提高了车辆的抗侧倾能力。 图10、图11所示分别为基于精确反馈线性化及PID控制的半主动连通式油气悬架与被动连通式油气悬架下车振动加速度和悬架动挠度对比曲线。悬架下车的振动加速度对比曲线表明,半主动控制后的连通式油气悬架并没有改善下车的振动加速度,从数值上看,在2 s和4 s冲击瞬间的半主动控制油气悬架下车的振动加速度分别由被动时的31.8 m/s2、36.8 m/s2分别增(减)到35.3 m/s2和33.85 m/s2,增(降)幅分别为11%和8%。此外,在4 s时刻,半主动控制的油气悬架在回复行程的加速度由被动时的-25.9 m/s2变化到-37.5 m/s2,即说明半主动控制后悬架下车的振动性能没有得到改善。之所以出现下车振动性能变差的情况,与控制系统的控制变量的选择有密不可分的关系,对于悬架系统由于其变量较多,不可能保证所有的变量都能达到预期的控制效果,一部分变量的改善必定会造成其他一些变量性能的恶化,而本文中更加关注的是上车的振动性能、悬架的动挠度和悬架的侧倾角,从而降低了对下车振动性能的要求,即当悬架下车的振动性能相对于被动油气悬架没有出现严重的恶化情况,仍然在接受范围内的。 图10 下车振动加速度(不同时刻干扰作用下) 图11 悬架动挠度(不同时刻干扰作用下) 悬架动挠度的对比曲线表明,半主动控制的连通式油气悬架的动挠度相对于被动油气悬架无论是在消减瞬时冲击,还是在缩短悬架的稳定时间上都得到了明显的改善。从数值上分析,在2 s和4 s的冲击瞬间,半主动控制的连通式油气悬架的冲击振幅由被动时的3.48 mm、3.66 mm降低到3.01 mm、2.90 mm,降幅分别为13.5%和20.8%。 3结论 (1)本文建立了连通式油气悬架的非线性数学模型,在此基础上利用微分几何法将连通式油气悬架非线性系统模型精确线性化,设计了半主动连通式油气悬架精确反馈线性化控制系统,并对控制系统进行了AMESim/Simulink联合仿真实验。 (2)仿真结果表明,基于精确反馈线性化及PID控制的半主动连通式油气悬架对上车的振动性能及悬架动挠度具有较好的改善作用,它缩短了连通式油气悬架在受干扰作用后的稳定时间,消减了悬架上车的瞬时冲击,提高了悬架的减振能力和抗侧倾能力。此外,使悬架动挠度过渡平缓,降低了动挠度的瞬时波动。 (3)半主动控制的连通式油气悬架对下车的振动性能改善并不明显,在左右悬架同时受到激励作用时,对下车的振动加速度有一定的改善,然而左、右悬架在不同时刻受到干扰作用时,下车振动加速度性能有一定的恶化,但在可接受范围之内。 参考文献: [1]吴仁智, 刘钊. 全路面起重机油气悬架液压系统技术分析[J]. 中国工程机械学报,2006, 4(1): 8-11. Wu Renzhi, Liu Zhao. Analysis on Hydraulic System and Technology Features of Hydro-pneumatic Suspension All Terrain[J]. Chinese Journal of Construction Machinery, 2006, 4(1): 8-11. [2]杨杰,陈思忠,吴志成,等.可调阻尼阀参数对油气悬架阻尼特性的影响[J].农业机械学报,2009,40(2):12-17. Yang Jie, Chen Sizhong , Wu Zhicheng ,et al . Analysis on the Effect of Controllable Valve Parameters on Hydro-pneumatic Suspension Damping Characteristics [J] . Transactions of the Chinese Society for Agricultural Machinery , 2009,40(2):12-17. [3]王欣, 方新, 高顺德. 连通式油气悬挂系统刚度特性分析[J]. 机床与液压, 2012, 40(9):55-57. Wang Xin, Fang Xin, Gao Shunde. Analysis on Stiffness Characteristic of a Connected Hydro-pneumatic Suspension System[J]. Machine Tool & Hydraulics, 2012,40(9):55-57. [4]吴光强, 黄焕军, 叶光湖.基于分数阶微积分的汽车悬架半主动控制[J]. 农业机械学报, 2014,45(7):19-24. Wu Guangqiang, Huang Huanjun, Ye Guanghu. Semi-active Control of Automotive Air Suspension Based on Fractional Calculus[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014,45(7):19-24. [5]Crosby M J, Karnopp D C. The Active Damper a New Concept for Shock and Vibration on Control [J]. The Shock and Vibration Bulletin, 1973,43(4):119-133. [6]陈一锴, 何杰, 张卫华. 多轴重型货车悬架系统改进天棚控制策略[J].农业机械学报,2011,42(6):16-22. Chen Yikai, He Jie, Zhang Weihua. Modified Skyhook Damping Control of Multi-axial Heavy Truck Suspension System[J]. Transactions of the Chinese Society for Agricultural Machinery,2011,42(6):16-22 [7]兰波,喻凡.车辆主动悬架模糊控制器的设计及其仿真分析[J].计算机仿真,2003,31(7):59-61. Lan Bo , Yu Fan . The Design of Fuzzy Logic Controller of Active Suspension and Simulation Analysis[J]. Computer Simulation, 2003,31(7):59-61. [8]Taghirad H D, Esmailzadeh E. Automobile Passenger Comfort Assured through LQG/LQR Active Suspension[J]. Journal of Vibration and Control, 1998, 4(5): 603-618. [9]陈龙, 李德超, 周孔亢. 自适应模糊控制技术在半主动悬架控制中的应用[J].农业机械学报, 2005, 36(4):5-8. Chen Long, Li Dechao, Zhou Kongkang. Application of Adaptive Fuzzy Control in Vehicle Semi-active Suspension System[J]. Transactions of the Chinese Society for Agricultural Machinery,2005, 36(4):5-8. [10]杨林,赵玉壮,陈思忠,等.半主动油气悬架的神经网络模型参考控制[J].北京理工大学学报,2011,31(1):24-28. Yang Lin , Zhao Yuzhuang , Chen Sizhong ,et al . Neural Network Model Reference Control for Semi-active Hydro-pneumatic Suspension[J]. Transactions of Beijing Institute of Technology , 2011,31(1):24-28. [11]史俊武, 李小伟, 张建武. 导弹发射车主动油气悬架反馈线性化控制[J]. 系统仿真学报, 2009,21(23):7617- 7621. Shi Junwu, Li Xiaowei,Zhang Jianwu. Feedback Linearization Control for Missile Launch Vehicle Active Hydropneumatic Suspension[J]. Journal of System Simulation, 2009, 21 (23):7617-7621. [12]王洪礼,石磊. 汽车悬架系统非线性振动的主动控制[J]. 机械强度, 2000, 22(3): 164-166. Wang Hongli, Shi Lei. Active Control for Nonlinear Vibration of Automotive Suspension[J]. Journal of Mechanical Strength, 2000,22(3):164-166. [13]么鸣涛,李钊,顾亮,等.基于微分几何法的半主动油气悬架LQR控制[J].北京理工大学学报,2011,31(5):519-523. Mo Mingtao,Li Zhao,Gu Liang.LQR Control for Vehicle Semi-active Hydro-pneumatic Suspension Based on Differential Geometry Theory[J].Tansactions of Beijing Institute of Technology, 2011,31(5):519-523. [14]方新. 连通式油气悬架系统特性研究[D]. 大连:大连理工大学, 2011. [15]王惠民. 流体力学[M]. 北京: 清华大学出版社, 2005. [16]Sarshari E, Sedigh A K, Sadati H. Optimal Control of Ride Comfort of a Passenger Car: Comparison between the Hydro Active and the Fully Active Suspension Systems[J]. SAE Technical Paper, 2010-01-1913. [17]Sarshari E, Asadi N. Design of Hydro-active Optimal Suspension for a Passenger Vehical[C]//Proceedings of the ASME 2010 International Mechanical Engineering Congress & Exposition.Texes:IMECE 2010-40630. [18]Sarshari E, Sedigh A K. Selection of Sensors for Hydro-active Suspension System of Passenger Car With Input-Output Pairing Considerations[J]. Journal of Dynamic Systems, Measurement, and Control, 2013, 135(1): 11004. [19]崔平远,薛小平,陈冲.非线性系统精确线性化的微分几何法[J].飞行力学,1993,11(2):1-9. Cui Pingyuan,Xue Xiaoping,Chen Chong.Differential Geometric Approach for Exact Linearization of Nonlinear Systems[J].Flight Dynamics,1993,11(2):1-9. [20]崔平远, 薛小平. 多输入非线性系统的状态反馈线性化[J].哈尔滨工业大学学报,1993,25(3):84-90. Cui Pingyuan,Xue Xiaoping.Linearization with State Feedback for Multi-input Nonlinear System[J].Journal of Harbin Institute of Technology,1993,25(3):84-90. (编辑王艳丽) ISSN1004-132X CHINAMECHANICALENGINEERING (TransactionsofCMES) Vol.27,No.4,2016thesecondhalfofFebruary Semimonthly(SerialNo.436)EditedandPublishedby:CHINAMECHANICAL ENGINEERINGMagazineOffice Add:P.O.Box772,HubeiUniversityofTechnology,Wuhan,430068,ChinaDistributerAbroadby:ChinaInternationalBook TradingCorporation(P.O.Box399,Beijing) Code:SM4163 ExactLinearizationandFeedbackControlofSemi-activeConnectedHydro-pneumaticSuspension CaoXuyangCaoLinlinWangDianlong DalianUniversityofTechnology,Dalian,Liaoning, 116024 Abstract:Based on differential geometry theory, the nonlinear system was transformed to a linear one, and the linear feedback control system of semi-active connected hydro-pneumatic suspension was done. With the software AMESim and MATLAB/Simulink, the co-simulation model of semi-active connected hydro-pneumatic suspension was completed. The simulation results show that the semi-active connected hydro-pneumatic suspension improves the property of upper vehicle, which decreases the stable time of instantaneous impact and the maximum values of instantaneous impact and enhances the ability of vibration damping and overturning resistance. Moreover, it improves suspension dynamic flexibility, which makes the suspension vibrate more smoothly and reduces the instantaneous vibration intensity. Key words:semi-active; connected hydro-pneumatic suspension; nolinearity; co-simulation 收稿日期:2015-02-02 基金项目:工信部联装[2012]533号 中图分类号:U463 DOI:10.3969/j.issn.1004-132X.2016.04.024 作者简介:曹旭阳,男,1974年生.大连理工大学机械工程学院副教授。主要研究方向为起重机液压控制设计与仿真。发表论文40余篇。操林林,男,1990年生。大连理工大学机械工程学院硕士研究生。王殿龙,男,1962年生。大连理工大学机械工程学院教授、博士研究生导师。