基于加权组合模型的数控系统软件可靠性估计
2016-06-23王力超张魁榜
王力超 韩 江 张魁榜 夏 链
合肥工业大学,合肥,230009
基于加权组合模型的数控系统软件可靠性估计
王力超韩江张魁榜夏链
合肥工业大学,合肥,230009
摘要:针对单一模型适应度不高的问题,提出一种采用加权组合模型对数控系统软件进行可靠性评估的方法。首先根据数控系统软件的特点,分别建立算术加权、几何加权及调和加权三种组合模型;然后采用改进的遗传算法实现模型最优加权值的求解;最后将数控系统软件的失效数据代入模型,预估出了系统软件的错误情况,完成了对数控系统软件可靠性的估计。实验以四组软件失效数据为对象,实验结果表明加权组合模型比单一模型具有更高的适应性;将模型应用于自主研发的手持数控系统,验证了该方法的可行性和有效性。
关键词:数控系统;软件可靠性;加权组合;遗传算法
0引言
在过去的三十年里,国内外学者提出了许多软件可靠性增长模型,这些模型已被广泛地应用于工业领域[1]。工程师需要在测试阶段收集失效数据,以便对模型的参数进行估计。待模型成功建立之后,便能更加精确地预计系统的软件可靠性、失效强度、初始错误数以及剩余错误数。这些模型在建模初期为了使模型不至于太复杂,提出了一些需要遵循的假设前提。但是,这些假设往往在实际情况中很难满足,导致在实际的使用环境中很难选择到最合适的模型[2]。另外,由于所采集的失效数据特征不同,使得这些模型计算结果出现估计偏差。尽管有很多学者致力于提高这些模型的预计准确度[3],但事实上还没有一个单独的模型能够在不同的应用上提供准确的预计结果。于是,有一些学者建议工程师们同时使用一系列模型,或者使用一个组合模型以提高在不同场合下软件可靠性预计的准确性[4]。但是在过去的文献中,大部分组合模型都是对单个模型平均地组合,或者仅仅是一个简单的线性组合,这些组合模型很难适合复杂的情况[4]。
综上所述,本文根据数控系统可实时控制的特点,建立了一个加权组合模型对数控系统软件可靠性进行估计。组合模型的加权形式分成三种:算术加权、几何加权、调和加权,权重值的优化将采用遗传算法。同时,本文对遗传算法进行了针对性的改进,通过降低其产生不满足初始条件的个体的概率,使算法可以更快地收敛。为了验证新模型的适应性、准确性及其他属性,本文采用四组已公开发表的失效数据,对新模型进行详细的实验评估。最后利用新模型对自主研发的手持数控系统进行软件可靠性分析和评估。
1经典基模型及其评价标准
多数经典软件可靠性增长模型假设在指定的时间间隔内所检测出的错误数服从非齐次泊松过程[5]。不同模型基于一系列的假设前提,只适用于特定的验证数据或测试条件。这个问题使得工程师在评估软件可靠性时很难选择合适的模型。
为了客观与定量地比较不同的模型,本文将采用六个数值作为模型的评价指标,包括均方差、χ2值、准确度、偏差、偏差趋势以及噪声[6],这些指标可以从不同方面反映模型是否适用于当前的失效数据或测试条件。
(1)均方差。均方差定义为
(1)
其中,xi为模型预测值,μi为实际观测值。均方差表示了模型的预测值与实际值之间的误差水平,其值越小,表明模型越接近实际。
(2)χ2值。χ2值定义为
(2)
其中,Ai为实际频数,Ei为理论频数。χ2值用来表示实际观察到的频数与一定假设下的理论频数之间的偏离程度,其值越小,表明模型越接近实际。

(3)
那么对于Ti+1,Ti+2,…,Ti+n这种单步向前的预测,其序列似然函数(即准确度)为
(4)
由于这个数值通常非常接近于0,且其对数值为负值,所以原则上采用其对数值的绝对值来进行比较。绝对值越小,表示其预测的准确度越高。
(4)偏差。偏差定义为根据如下所示序列进行转换的柯尔莫戈洛夫-斯米尔洛夫距离(Kolmogorov-Smirnovdistance),也叫KS距离:
(5)
(5)偏差趋势。偏差趋势定义为根据如下所示序列进行转换的KS距离:
(6)
其中,k=s,s+1,…,i-1,xj=-ln(1-uj)。由于有些偏差不能被u-结构图所核查到,比如某些模型在预测前期呈现出乐观特性,而在后期又呈现出悲观特性,在u-结构图里这些偏差最后达到平衡,所以需要采用y-结构图将ui的某种趋势显示出来。同样,偏差趋势越接近于0,表明模型适应变化的能力越好。
(6)噪声。噪声定义为
(7)
其中,mi为Ti的预测中值。n的数值越小,表示模型的预测行为拥有更小的噪声及更好的平滑度。
为了比较几种模型对同一组数据的预测结果,本文采用一个简单的评估算法给出所有模型的每个评价指标的排名,然后通过取相同权重值的方式将它们累加起来。模型排名累加值越小,表明其越适合用于对所选取的失效数据的预测。
2建模方法
2.1加权组合模型
本文采用的加权组合的方式有三种,分别为算术加权、几何加权、调和加权[5]。
假设有n个基模型,并且每个基模型都充分满足其主要假设条件,可以独立产生统计估计。因此,加权组合模型趋向于继承基模型的特性。
(1)算术加权(WA)定义为
(8)
(2)几何加权(WG)定义为
(9)
(10)
为了验证加权组合模型的性能,实验使用两个经典基模型和三个组合模型进行对比,将一组已公开发表的失效数据[5]作为实验对象,如表1所示。基模型的参数采用最大似然估计方法来确定,并且计算均方差作为评价模型性能的指标。

表1 相同权重组合模型
实验结果表明,每个基模型在这组失效数据上的预测能力有所不同。比如,GO模型在整个测试时间内普遍低估了错误数;而Duane模型在测试的开始阶段一直高估错误数,在测试的后半阶段低估错误数;WA模型可减缓低估和高估的不平衡表现,广泛应用于一系列模型的线性组合;WG和WH模型往往加重了加权值的影响,所以它们一般可以作为模型间非线性组合的一种替代手段。从对这组数据的估计结果看,由于GO模型和Duane模型估计的不平衡,所以三个加权组合模型的均方差呈现了比基模型更好的结果。GO模型估计的均方差为44.42,Duane模型估计的均方差为39.84,而三个加权组合模型估计的均方差分别为23.16、25.33、27.91,预测效果要明显优于基模型预测效果。
2.2改进型遗传算法
加权模型中的权重取相等的值显然并不能达到组合模型最优的结果,于是,如何寻找组合模型最合适的权重值成为一个寻求最优解的问题。遗传算法是计算数学中用于解决最佳化的搜索算法[7]。本文将针对组合模型中权重值的特点进行一些针对性的改进,以期提高算法的运算效率,缩短运算时间。
算法流程如图1所示,主要分为染色体初始化、个体适应度计算及排序、个体选择、染色体交叉以及染色体变异。

图1 遗传算法流程图

(2)计算个体适应度。每个染色体的适应度是由适应度函数来计算的,它反映了染色体接近最优值的程度。基于均方差的适应度函数和基于对数最大似然的适应度函数如下所示:
(11)
现阶段,在乡镇中财政管理与会计核算分属于两个部门,但是在功能的角度上来看,这两个部门之间的联系非常密切的,既是相互监督也相互协调的关系。只有实现二者之间的相互协调相互监督才能实现乡镇财政工作的有序开展。但是,在一部分乡镇当中,相关管理部门对于两项工作进行了混淆,甚至出现了一个部门兼顾两个部门工作的情况,如果财政部门独揽本职工作与会计核算工作,就会出现职权划分的问题,增加了管理工作的难度,也会使得监管部门无法有效实施监管工作。
(3)个体选择。个体选择的方式众多,本文采用比例选择方式。抽样方式采用轮盘赌方法抽样。其主要方法与传统遗传算法基本一致。
(4)染色体交叉。本文采用有性交叉,即两个父体产生两个子代。父体由之前的轮盘赌选择产生。由于父代的选择具有一定的随机性,因此可能会出现被选择交叉的两个父体是同一个染色体,那么无论如何进行交叉操作,其子代都将会是父代的复制,这无疑使算法进行了一次无意义的计算。所以,在个体选择的时候会采取一定的措施来避免这种情况的出现。
由于交叉操作后将产生新的染色体,而新染色体同样要满足之前提到的权重值的条件。为了避免由于新染色体不满足预设条件而使算法产生空运算,在交叉时除了传统遗传算法设定的交叉概率外,本文还设置了一个辅助概率值,目的是使染色体的二进制串高位被交叉的概率低于低位被交叉的概率。这样的方法可以提高新染色体满足预设条件的概率,也可减少新群体的多样性,使算法收敛更快。
(5)染色体变异。变异主要是为了对当前的个体引入新的基因,增加群体的多样性,避免算法过早地收敛于局部最优解。同样,由于变异后的染色体不一定满足之前的预设条件,故可以通过设置辅助概率值来提高新染色体满足预设条件的概率。
表2所示的是分别采用传统遗传算法和改进型遗传算法在对同一组失效数据进行寻优的对比实验。表2中,w1、w2、w3、w4分别表示GO模型、Musa模型、Duane模型和MO模型的权重值。实验选择群体大小为100,最大迭代次数为5000,算法选择轮盘赌方法,交叉算法选择均匀交叉,交叉率为0.6,变异率为0.05。
表2实验结果表明,改进型遗传算法在计算时间上明显缩短了。

表2 传统遗传算法与改进型遗传算法计算时间比较
3仿真分析与性能评价
3.1数据选择与趋势分析
为了验证加权组合模型的预测能力,根据最终需要建模的对象----移动手持数控系统单元的特点,本文选取了四组已公开发表的真实的失效数据。这四组数据分别来自于实时命令与控制系统、无线网络系统以及监控与实时系统。
如果对失效数据不加分析地盲目套用模型,很有可能得到无意义的评估结果。因此,在使用失效数据对系统软件进行可靠性估计前,如果能对失效数据集进行有效的趋势分析,就可以选取更加合适的可靠性模型,避免模型选择的盲目性[8]。
拉普拉斯法是用分析法检验失效数据趋势的一种最常用和最重要的方法。当收集的数据是累积失效数时,设N(k)为第k个时间单位(含)前的累积失效数,其拉普拉斯因子的计算式为
(12)
根据拉普拉斯方法计算出失效数据在每一点上的拉普拉斯因子u,如图2所示。

图2 四组失效数据的拉普拉斯因子

3.2加权组合模型性能评价
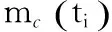
将3.1节中所选取的四组失效数据作为实验对象,用GO模型、Musa基本执行时间模型、Duane模型以及MO模型对其进行估计。然后通过算术加权、几何加权以及调和加权三种方式组合模型,采用改进型遗传算法确定每个基模型的权重值。最后通过模型评价指标均方差、χ2值、准确度、偏差、偏差趋势以及噪声来对每个参与比较的模型进行排序,结果如表3~表6所示。

表3 模型评价(DS1)

表4 模型评价(DS2)

表5 模型评价(DS3)
表6 模型评价(DS4)
通过对比实验可以看出,基模型可能对某组失效数据具有很好的预测效果,但是对其他组却不能达到同样的效果。例如,GO模型在以DS2为对象的实验中各项评价指标综合排名第一,甚至略优于本文提出的加权组合模型,但是其在以DS3为对象的实验中综合评价位列倒数第一。也就是说,基模型的适应性比较差。综合观察三个加权组合模型,它们对各组数据的预测效果基本都排名前列。对比各基模型,加权组合模型的适应性要高出很多。实验结果证明了这种建模方法是可行的,尤其对此前未有建模经验的系统或失效数据趋势变化较大的系统是非常有效的。
4实验
本文研究数控系统软件可靠性加权组合模型的目的是对一套手持数控系统的软件可靠性进行预测。该手持数控系统由合肥工业大学CIMS研究所自主研发设计,既是一个实时监控系统,也是一个无线网络系统,同时也具有数控系统上层的部分功能。该系统由手持设备端和数控系统端两部分组成。手持设备端采用通用的智能移动设备(如智能手机、平板电脑等)作为终端,利用Wi-Fi无线通信技术可以实时地远程访问与操作现场数控设备。手持数控系统如图3所示。
表7所示的是手持数控系统在开发与测试阶段所记录的失效数据,并利用加权组合模型对数据进行了估计。

图3 手持数控系统

表7 手持数控系统软件可靠性估计
模型的预测结果表明,该手持数控系统中共存在159个错误(估计值),在20个观测期的检测与修改后还存在11个错误(估计值),在第21个观测期内检测出的错误期望数为1.39。这些数据对研发人员修改手持数控系统软件中的错误具有非常重要的意义。
5结语
本文为了解决传统单个模型适用范围非常有限的问题,按照加权组合方式的不同提出了三个加权组合模型(WA、WG、WH),以便对数控系统软件可靠性进行估计与预测。为了验证模型的性能,本文采用四组已公开发表的失效数据作为实验对象,对传统单个模型与三个加权组合模型进行了全面的比较。实验结果表明,加权组合模型比单个模型拥有更高的适应度,适用于各种趋势的失效数据。
在寻求最优组合权重值时,本文对遗传算法进行了改进,降低了产生不适合初始假设条件的个体的概率。实验结果表明,改进型遗传算法可以提高15%~25%的运算速度。
最后,利用已得到验证的模型对自主研发的手持数控系统进行软件可靠性估计和预测,得出的数据对研发人员修正系统软件中的错误具有非常重要的意义,同时也验证了基于加权组合模型的数控系统软件可靠性估计方法的可行性和有效性。
参考文献:
[1]MusaJD,IanninoA,OkumotoK.SoftwareReliability:Measurement,Prediction,Application[M].NewYork:McGraw-HillBookCompany,1987.
[2]SuYushen,HuangChinyu.Neural-network-basedApproachesforSoftwareReliabilityEstimationUsingDynamicWeightedCombinationalModels[J].TheJournalofSystemsandSoftware,2007,80(4):606-615.
[3]HuangChinyu,LinChuti.AnalysisofSoftwareReliabilityModelingConsideringTestingCompressionFactorandFailure-to-FaultRelationship[J].IEEETransactionsonComputers,2010,59(2):283-288.
[4]KibriaBMG,NadarajahS.ReliabilityModeling:LinearCombinationandRatioofExponentialandRayleigh[J].IEEETransactionsonReliability,2007,56(1):102-105.
[5]HsuChaojung,HuangChinyu.OptimalWeightedCombinationalModelsforSoftwareReliabilityEstimationandAnalysis[J].IEEETransactionsonReliability,2014,63(3):731-749.
[6]LyuRM,NikoraA.AHeuristicApproachforSoftwareReliabilityPrediction:theEqually-weightedLinearCombinationModel[C]//InternationalSymposiumonSoftwareReliabilityEngineering.Austin,1991:172-181.
[7]郭平. 软件可靠性工程中的计算智能方法[M]. 北京:科学出版社,2012.
[8]陆民燕. 软件可靠性工程[M]. 北京:国防工业出版社,2011.
(编辑王艳丽)
CNCSystemSoftwareReliabilityEstimationBasedonWeightedCombinationalModels
WangLichaoHanJiangZhangKuibangXiaLian
HefeiUniversityofTechnology,Hefei,230009
Abstract:According to the problems of weak adaptability of single model, a method for CNC system software reliability estimation by using weighted combinational models was proposed. Firstly, three weighted combinational models, namely weighted arithmetic, weighted geometric, and weighted harmonic combinations, were proposed according to the characteristics of CNC system software. Secondly, the improved genetic algorithm was adopted to solve optimal weights for model combinations. Lastly, CNC system software failure data was taken into the models to estimate the faults of system, and then the estimation of CNC system software reliability was completed. Experiments were performed based on four sets of software failure data, and numerical results show that the weighted combinational model has a greater adaptability than that of single models. Then, the proposed models were applied to a self-developed handheld CNC system, and results verifies the feasibility and validity of the proposed method.
Key words:CNC system;software reliability;weighted combination;genetic algorithm
收稿日期:2015-09-01
基金项目:国家自然科学基金资助项目(51575154)
中图分类号:TP27; TP391
DOI:10.3969/j.issn.1004-132X.2016.04.003
作者简介:王力超,男,1986年生。合肥工业大学机械与汽车工程学院博士研究生。主要研究方向为数控系统软件可靠性、数控装备网络化等。韩江,男,1963年生。合肥工业大学机械与汽车工程学院教授、博士研究生导师。张魁榜,男,1987年生。合肥工业大学机械与汽车工程学院讲师、博士。夏链(通信作者),女,1964年生。合肥工业大学机械与汽车工程学院教授、博士。
