基于GPS的油罐沉降监测系统
2016-06-22王祖光杨开伟李娟娟
王祖光,杨开伟,李娟娟
(1.北京东方新星石化工程股份有限公司,北京 100070;2.中国电子科技集团公司第54研究所,石家庄 050081;3.河北省卫星导航技术与装备工程技术研究中心,石家庄 050081;4.卫星导航系统与装备技术国家重点实验室,石家庄 050081)
基于GPS的油罐沉降监测系统
王祖光1,杨开伟2,3,4,李娟娟2,3,4
(1.北京东方新星石化工程股份有限公司,北京 100070;2.中国电子科技集团公司第54研究所,石家庄 050081;3.河北省卫星导航技术与装备工程技术研究中心,石家庄 050081;4.卫星导航系统与装备技术国家重点实验室,石家庄 050081)
摘要:设计了GPS的油罐沉降监测系统,提出了系统建设实施方案,介绍了系统的设备组成与工作原理及高精度实时处理和静态基线解算算法。通过软件研发、原型系统搭建、测试试验、数据处理与分析等,对系统的功能与性能进行测试验证。试验表明,基于GPS进行高精度油罐沉降监测具有可行性,且其监测精度较高,完全满足油罐沉降监测的需求。
关键词:GPS;高精度;RTK;基线解算;沉降监测
0引言
对原油储备库油罐基础进行充水预压监测、油罐充油使用过程中进行沉降监测等是炼油厂、油库管理单位以及油田安全管理、工程作业的重要工作。但长时间以来,该项工作主要都是依赖传统的测量手段(如水准测量)来进行沉降监测。一般而言,油罐区域空间分布较分散,水准测量路线复杂,由于需要多个人员进行施测并进行事后数据处理,工作效率低下,且不具备实时监测的能力。因此迫切需要提出一种新的监测方法替代传统的监测手段,对油罐沉降进行高精度、实时监测。
基于GPS技术的沉降监测理论与方法,是当前广泛采用的沉降监测新方法、新技术之一。GPS卫星定位技术相比于传统的测绘作业方法与模式有着显著的特点和优越性,其优越的性能及广泛的适用性,是常规测量作业难以比拟的。GPS以其全天候、高精度、高效率、实时动态等优点,成为当今极为重要的监测手段之一。
如今,GPS卫星定位系统技术已经成熟,其在各种行业、各种高精度领域中也被广泛应用,但是GPS用于油罐沉降监测中尚未开展,在这种背景下建立基于GPS的高精度油罐沉降监测系统,能
够有效进行油罐沉降监测,降低生产成本、提高工作效率。
1系统组成与工作原理
1.1系统组成
基于GPS的高精度油罐沉降监测系统由数据采集子系统、数据通信子系统、数据处理子系统及辅助支持子系统组成。系统体系架构如图1所示。
图1 基于GPS的高精度油罐沉降监测系统架构图
数据采集子系统主要实现GPS导航信号接收与观测数据采集功能,包括GPS天线、GPS接收机以及基准点等设备。
数据通信子系统实现将采集的GPS观测数据上报给数据处理子系统,同时将数据处理子系统的监控指令发送给GPS接收机。
数据处理子系统主要完成数据处理与系统监控功能。数据处理包括实时处理和事后处理两种方式:通过实时数据处理,得到厘米级的油罐沉降监测结果,并自动进行系统监控;事后处理能够得到毫米级的油罐沉降监测结果。
辅助支持子系统主要包括供电、避雷等设备,满足在野外恶劣条件下系统建设。
基于GPS的高精度油罐沉降监测系统的典型建设与实施如图2所示。GPS天线安装在被监测的油罐上,并保证无遮挡,基准点上也安装GPS天线,GPS接收机安装在附近室内;通信链路采用无线方式(3G或网桥等)实现数据通信;数据处理与监控系统安装在室内,对数据进行处理分析与监控。
图2 基于GPS的高精度油罐沉降 监测系统建设实施图
1.2工作原理
基于GPS的高精度油罐沉降监测系统的工作原理为:高精度GPS接收机进行连续观测采集GPS观测数据,通过通信链路将观测数据发送给数据处理子系统;数据处理子系统的数据处理软件实时接收各个接收机采集上报的GPS高精度观测数据,并根据配置好的处理模式和参数进行实时处理,生成实时监测结果,并发送给系统监控计算机;系统监控计算机实时显示监测结果和系统运行状态,将收到的监测处理结果进行判断,如果结果异常则进行告警。
事后处理模式与实时处理模式类似,区别在于实时模式处理的是实时上报的观测数据,而事后模式处理的是按照固定格式存储的观测数据文件。
2数据处理算法

(1)
在站间单差的基础上再求星间单差,便得到双差观测值为
(2)
(3)
将式(3)代入双差组合式(2)中,并顾及T1、T2两测站同步观测j,k两颗卫星,在忽略大气折射残差影响的情况下,双差观测方程为
Δ
(4)
式中,ΔNjk=ΔNk-ΔNj
可以看出卫星钟差和接收机钟差也已经被消除,这是双差模型的重要优点。
若取测站T1为已知参考点,则在双差观测方程中,除了测站T2的位置为待定参数之外,还包含有整周模糊度参数项ΔNjk.通常在构成双差观测时,除了取一个测站为参考点外,同时也要取一颗观测卫星为参考星[4]。
如果要实现单历元解算(或进行实时动态定位),则必须先解算出整周模糊度,这个过程就是RTK初始化过程。
2.1RTK解算
载波相位动态相对定位(RTK)的数学模型(双差观测方程)为[2,5]
(5)
式中
(6)
由于流动站的位置是不断变化的,所以RTK一般采用一个历元的观测值。若以Nr和Ns表示包括参考站在内的测站总数和同步观测的卫星数,则一个历元的双差观测方程的未知数个数和观测方程个数分别为[2]
未知数个数=3(Nr-1)+(Ns-1)(Nr-1)
单历元双差观测值数=(Ns-1)(Nr-1)
可见,单历元解算的条件无法满足,由于整周模糊度在信号锁定的情况下是保持不变的,一旦初始化完成,则在每个历元就只有3(Nr-1)个未知数,则可解的条件变为
(Ns-1)(Nr-1)≥3(Nr-1),或Ns≥4.
只要同步观测的卫星数大于4颗,就可以进行RTK定位解算。定位过程中一旦发生失锁,则要重新进行初始化。
2.2静态基线解算
若两测站同步观测卫星为Sj和Sk,设Sj为参考卫星,则可得双差观测方程的线性化形式[2,4],即:
(7)
式中:
令:
(8)
则可改写为如下误差方程式的形式,即:
(9)
当两测站同步观测的卫星数为ns时,可得误差方程组如下[2,6],即:
υ(t)=a(t)δX2+b(t)ΔN+Δ
(10)
式中:
δX2=[δX2δY2δZ2]T;
如果在基线的两端,对同一组卫星观测的历元数为nt,那么相应的误差方程组由上式可得[6]:
(11)
式中:
相应的法方程及其解,可表示为[2,6]
NΔY+W=0,
(12)
ΔY=-N-1W,
(13)
式中:
ΔY=[δX2ΔN]T;
N=(A B)TP(A B);
W=(A B)TPL.
3测试与试验
为了测试油罐沉降监测系统的功能与性能,使用GPS高精度接收机进行了大量的试验,包括RTK实时动态测试与静态基线测试,两组试验均在事先高精度标定的基线场内进行。两台GPS接收机分别架设在基准点观测墩上,数据采样率为1s,基线长度为5.760m,试验持续时间为2h.
3.1实时动态监测
将两台GPS接收机采集的观测数据导出,用高精度数据处理软件进行RTK单历元解算,解算结果如图3所示。
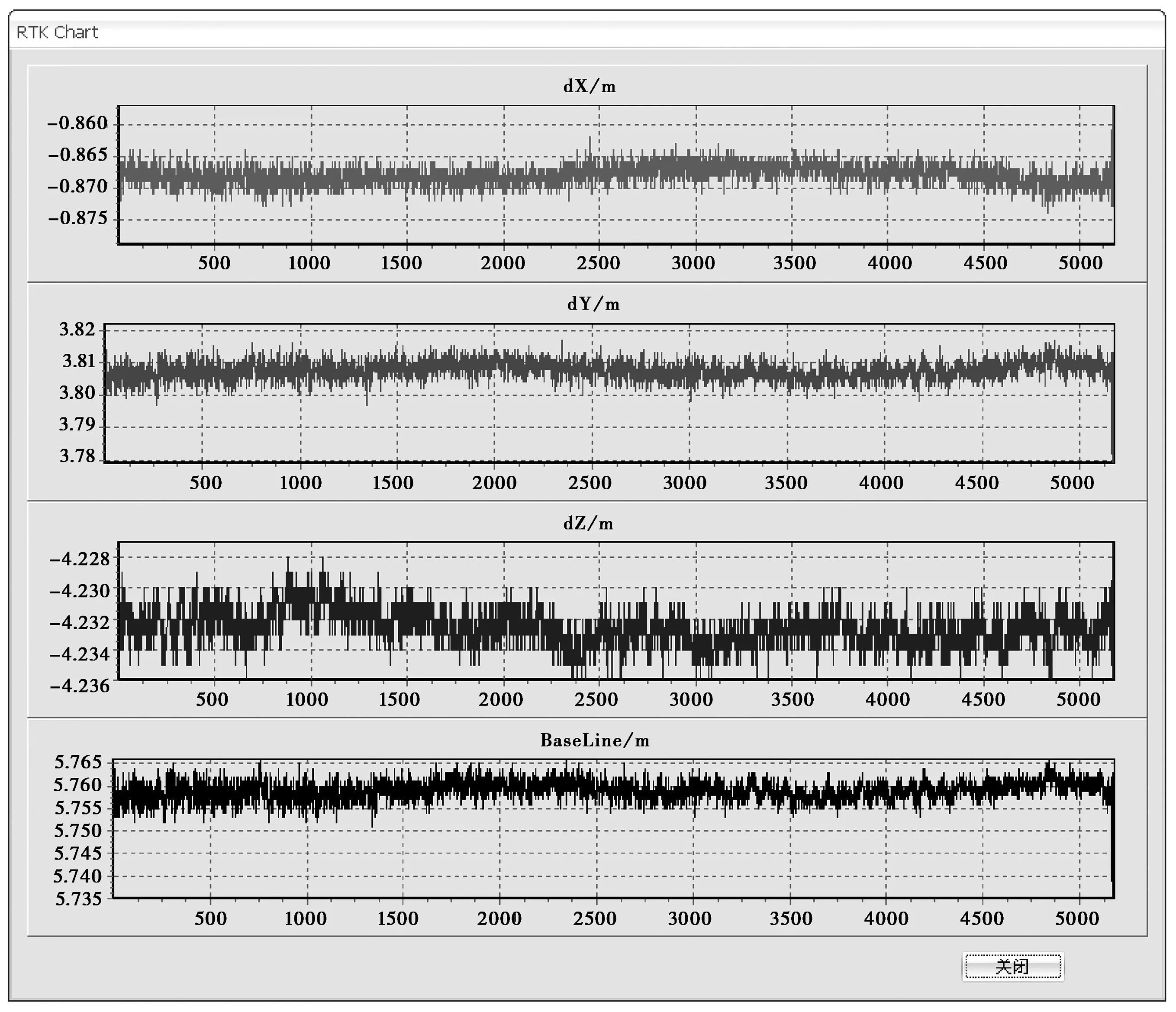
图3 GPS动态RTK测试结果
由图3可见,用GPS油罐沉降监测系统进行实时处理监测,当基线为6m左右时,其X、Y、Z三个方向的精度都达到毫米级,基线长度监测精度也达到毫米级。随着基线长度的增加,当基线长度为2km以上时,精度会有所下降,可能会达到厘米级。
3.2事后处理监测
将两台GPS接收机采集的观测数据导出,用高精度数据处理软件进行静态基线解算,解算结果如图4所示。
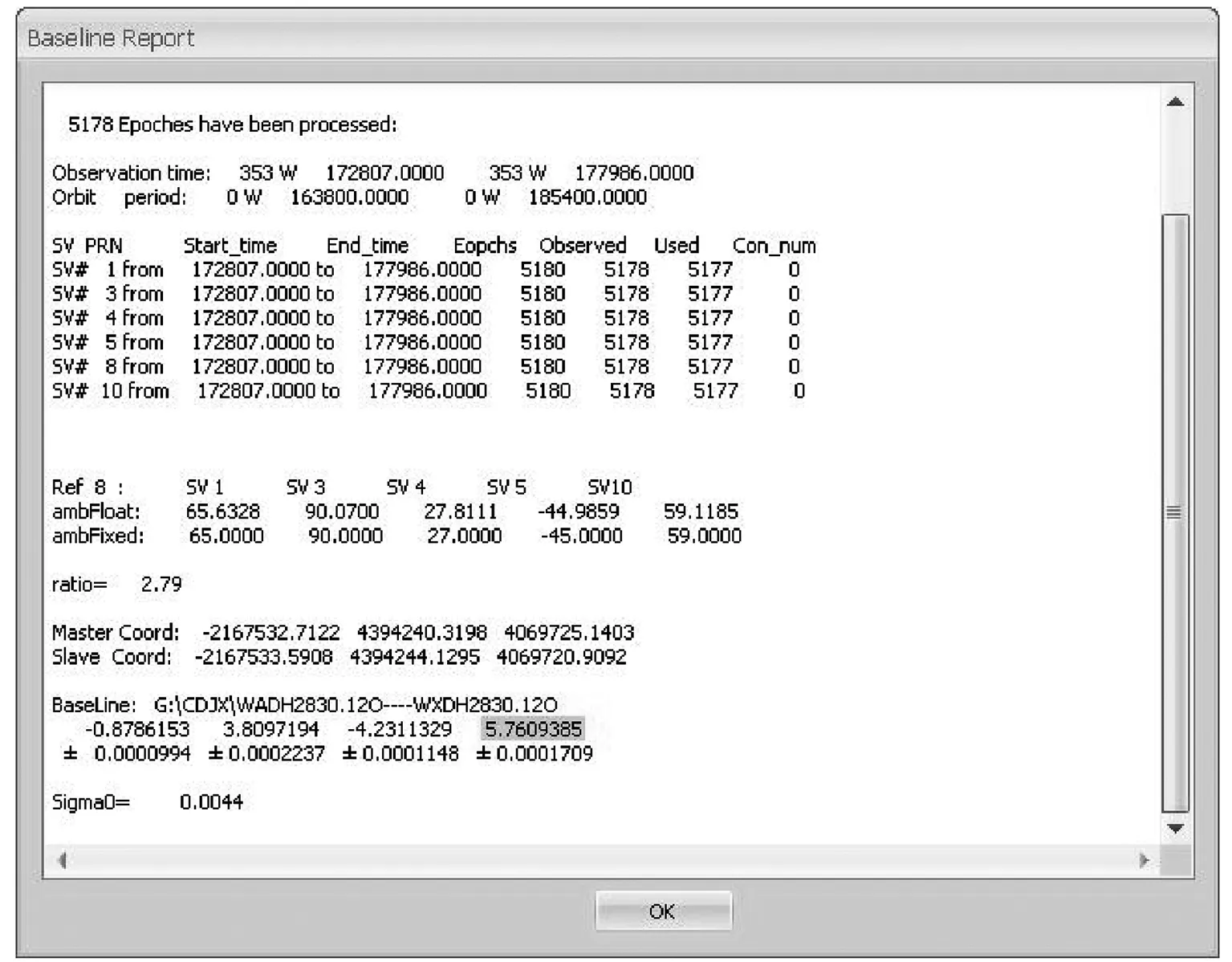
图4 GPS静态基线解算结果
由图4可见,静态基线后处理解算结果与真值(5.760m)相差0.000 9m,绝对精度优于1mm,其统计精度为0.000 170 9,达到亚毫米级。静态基线后处理精度比实时RTK处理精度高,当基线长度较长时,可以采用实时监测处理和事后基线处理两种方式,以提高系统的可靠性和准确度。
4结束语
GPS技术用于油罐沉降的实时、动态沉降监测,是GPS技术在高精度应用领域的扩展,也是现代工程监测、提高工作效率的迫切要求。本文对基于GPS的高精度油罐沉降监测系统进行了设计,并结合工程实际给出了系统的建设实施方案。在对高精度数据处理算法进行理论阐述的基础上研发出实时和事后高精度数据处理软件,并分别进行多种测试试验对系统性能进行测试。
通过系统原型搭建与试验数据分析,可以得到以下结论:
1) 用GPS油罐沉降监测系统进行实时监测处理时,处理精度可以达到厘米级甚至毫米级;并具有实时性好、监测内容直观的优点;
2) 利用事后静态基线进行数据处理的方式,处理精度可以达到毫米级甚至亚毫米级;
3) 根据不同的工程监测需求可以选择不同的处理方式,但采用两种方式相结合的模式能够提高系统的可靠性和准确度。
通过理论研究、软件开发、系统建设、测试试验,基本实现了基于GPS的高精度油罐沉降监测系统,系统能够正常运行、监测精度满足要求,具备工程推广的条件。
参考文献
[1] 李征航,黄劲松.GPS测量与数据处理[M],武汉:武汉大学出版社,2011:162-168.
[2] 丁发,熊永良.GPS卫星导航定位技术与方法[M],北京:科学出版社,2009:104-113.
[3] 忠谟,易杰军.GPS卫星测量原理与应用[M].测绘出版社,1992:109-145.
[4] 根友.高精度GPS定位及地壳形变分析若干问题的研究[D].武汉:中国科学院测量与地球物理研究所,2004:59-63.
[5] 子卿,葛茂荣.GPS相对定位的数学模型[M].北京:测绘出版社,1998:119-129.
[6] 崔希璋,於宗俦,陶本藻,等。广义测量平差[M].武汉:武汉大学出版社,2012:31-64.
王祖光(1984-),男,工程师,主要从事工程测量及卫星导航数据处理方面的工作。
杨开伟(1984-),男,工程师,主要从事卫星导航数据处理方面的工作。
李娟娟(1984-),女,工程师,主要从事卫星导航数据处理方面的工作。
Hign Precision Oilcan Settlement Monitoring System Based on GPS
WANG Zuguang1,YANG Kaiwei2,3,4,LI Juanjuan2,3,4
(1.BeijingNewOrientalStarPetrochemicalEngineeringCo.,Ltd,Beijing100070,China;2.The54thResearchInstituteofCETC,Shijiazhuang050081,China;3.SatelliteNavigationTechnologyandEquipmentEngineeringTechnologyResearchCenterofHebeiprovince,Shijiazhuang050081,China;4.StateKeyLaboratoryofSatelliteNavigationSystemandEquipmentTechnology,Shijiazhuang050081,China)
Abstract: The thesis designed the hign precision oilcan settlement monitoring system based on GPS, whose implementation scheme of system construction is proposed. And introduced its equipment composing and theory and the algorithm of high precision real-time and static base-line.Through software developing, prototype system integrating,test examination and data processing,the function and performance were validated. Examination proved the feasibility of Using GPS for high precision oilcan settlement monitoring,and the precision completely satisfy the need of oilcan settlement monitoring.
Keywords:GPS; high precision; RTK; baseline resolution; settlement monitoring
doi:10.13442/j.gnss.1008-9268.2016.02.015
收稿日期:2015-06-10
中图分类号:P228.4
文献标志码:A
文章编号:1008-9268(2016)02-0080-05
作者简介
联系人: 王祖光 E-mail:w273196740@126.com