基于SAE云平台的仿生偏振导航测量误差分析
2016-06-22吴水平关桂霞焦健楠王雪琪柯子博褚金奎晏磊
吴水平,关桂霞,焦健楠,王雪琪,柯子博,褚金奎,晏磊
(1.首都师范大学 信息工程学院,北京 100048;2.北京大学空间信息集成与3S工程应用北京市重点实验室,北京 100871;3.大连理工大学 精密特种加工教育部重点实验室,大连 116023)
基于SAE云平台的仿生偏振导航测量误差分析
吴水平1,2,关桂霞1,焦健楠2,王雪琪2,柯子博2,褚金奎3,晏磊2
(1.首都师范大学 信息工程学院,北京 100048;2.北京大学空间信息集成与3S工程应用北京市重点实验室,北京 100871;3.大连理工大学 精密特种加工教育部重点实验室,大连 116023)
摘要:针对利用自然偏振特性的自主导航——仿生偏振导航,天空偏振光分布模式与载体的地理位置及航向间的映射关系,研究不同天气条件下的仿生偏振导航测量误差情况,提出利用测量误差参数值修正系统测量误差。对导航定位而言,测量计算的精度对于导航定位是至关重要的。对不同天气条件下,多导航单元进行方位角测量,利用云计算对大量的测量数据进行仪器误差和随机误差分析,进而得到误差参数值,为提高仪器的测量精度提供评估依据。
关键词:云计算;仿生;偏振;导航;误差
0引言
仿生偏振导航是一种基于自然偏振特性的自主导航方法。通过大气偏振模式来获得方向信息实现偏振光导航。之前,国外对于偏振光导航的研究倾向于生物偏振导航基础研究,包括对生物偏振导航行为、神经处理机制、偏振感受视觉[1]方面研究[2],目前,国外研究偏振仪器较多,并且已经产品化。2013年NASA在ACE卫星任务实验中,通过偏振仪获取大气偏振信息,从而完成PODEX(偏振仪定标实验)[3], 推动了现有的偏振仪器的发展。国内,北京大学对仿生偏振导航定向机理,天空偏振模式图动态特性进行了分析与研究[4-5],大连理工大学基于Point-source 测量方法研制出仿生偏振导航的测角仪器[6-7]。另外,北京邮电大学、合肥工业大学、哈尔滨工业大学等开展天空偏振光检测技术研究以及组合导航研究工作。
至今,已研发的天空偏振光的检测设备大致可以分成两大类,分别为点源式和图像式,图像式偏振光检测设备多用来研究天空偏振光分布模式以及变化规律等问题。点源式偏振光检测系统实时性高,但易受外界环境干扰。由于偏振模式分布模式易受天气情况而变化,则偏振仪器测量存在一定的误差,此问题限制了其在应用方面的进一步发展。
为了使仿生偏振导航系统在实际现场高精度自动运行,本文研究旨在提高仿生偏振导航仪器的精度以及实用性。采用不同天气状态下,多导航单元反复操作的“测量-计算-搜寻-分析-描述-提高”研究方案对测量误差进行分析研究。
由于对地面多导航单元进行实际测量的过程中,产生了巨大的计算量与数据处理量,并且算法需要共享资源、且重复多次执行。为了提高运算速度,选取以云平台系统作为支持,采用云计算技术及并行算法[8]进行分析。云计算是一种新兴的商业计算的模式[9]。按照云计算的功能理解,其实是一种以互联网为中心的超级计算模式。本文涉及到的云计算技术,软件和数据都存储在数据中心,用PHP技术实现云计算算法。通过浏览器访问的在线仿生偏振导航误差分析应用,获取误差分析参数值,为提高测量精度提供评估依据。
1仿生偏振导航仪器原理
本文选用的单体(导航单元)为大连理工大学研制的无机光电材料仿生偏振导航测角仪器[10],如图1所示,角度范围从0°~180°, 其中传感器的当前方向(即身体长轴)为0°方向轴,当方向轴与太阳子午线轴重合的时候,它们的夹角为0°.如图1所示,直线方向为90°位置,逆时钟转动角度增大。

图1 测角仪器(单体)
导航偏振光检测平台[11]由6个透振方向不同的线性偏振片组成,相邻两个偏振片之间的夹角为60°且透振方向也为60°.相对的两个偏振片透振方向互相垂直,每个偏振片下面放置一个光电转换器,光电转换器输出的电信号通过对数比率放大以后联立求解,即可获得单体相对于太阳子午线之间的夹角[12]。每一个偏振正交单元由一对带有对数比率放大器的偏振轴相互垂直的偏振光传感器组成。
一个偏振光传感器的输出可以描述为
s(φ)=KI[1+dcos(2φ)],
(1)
式中: K为一个常数; I为总的光强度; d为是偏振程度; φ为被导航物长轴相对于太阳子午线的当前方向,即导航单元的方位角。
一个偏振正交单元的输出方程为
(2)
(3)

2云平台构建与数据管理
云平台系统主要包括数据存储、云计算和可视化三个模块。系统设计和运行在新浪云计算平台上。数据存储和云计算模块由新浪云分布式任务队列作为底层支撑,程序采用PHP+MySQL的架构。可视化模块采用html代码编写,web浏览器访问。文件保存在中央版本库SVN(Subversion:版本控制系统)仓库,通过使用TortoiseSVN向SAE部署代码。
在新浪云平台上,结合MySQL服务,使用PHP技术,实现一个基于云计算的仿生偏振导航误差分析系统,系统结构如图2所示。
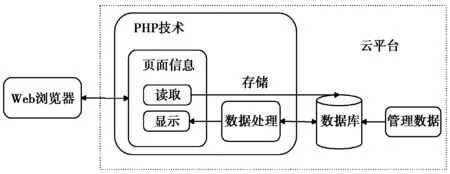
图2 系统结构图
2.1SAE云平台
实验选取典型的PaaS(Platform as a Service)类型的云计算平台——新浪云平台(SAE:Sina App Engine)[13],该平台提供了基于MySQL的数据库集群服务,基于PHPMyAdmin的管理工具以及可以在线编辑的语言运行环境,利用这些服务可以在SAE平台构建数据库,开发web应用,建立云计算系统,通过浏览器就可以统一编辑和管理,从而实现基于SAE云平台的仿生偏正导航测量误差分析。
SAE平台架构[14],如图3所示,主要由负载均衡、Web服务池、Web服务器、运行环境、服务五部分。SAE不需要开发者去部署和运维MySQL、Storage等程序,而是将这些程序通过服务的形式以接口提供给开发者去使用。
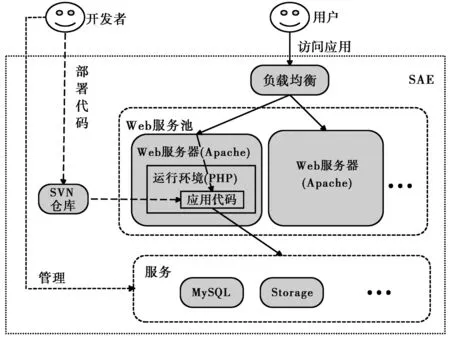
图3 SAE平台架构图
2.2数据管理
基于仿生偏振导航测角原理[15-16],以及研发的测角仪器,实验过程中需要采集大量的实验数据,存储在SAE云平台上并用以计算。在SAE云平台上本文使用MySQL存储数据[17],大量的实验数据通过管理页面中集成的PHPMyAdmin管理工具导入到MySQL数据库中。如图4所示,数据库中data1,data2…分别存储的是多单体第1组,第2组…的实测实验数据。
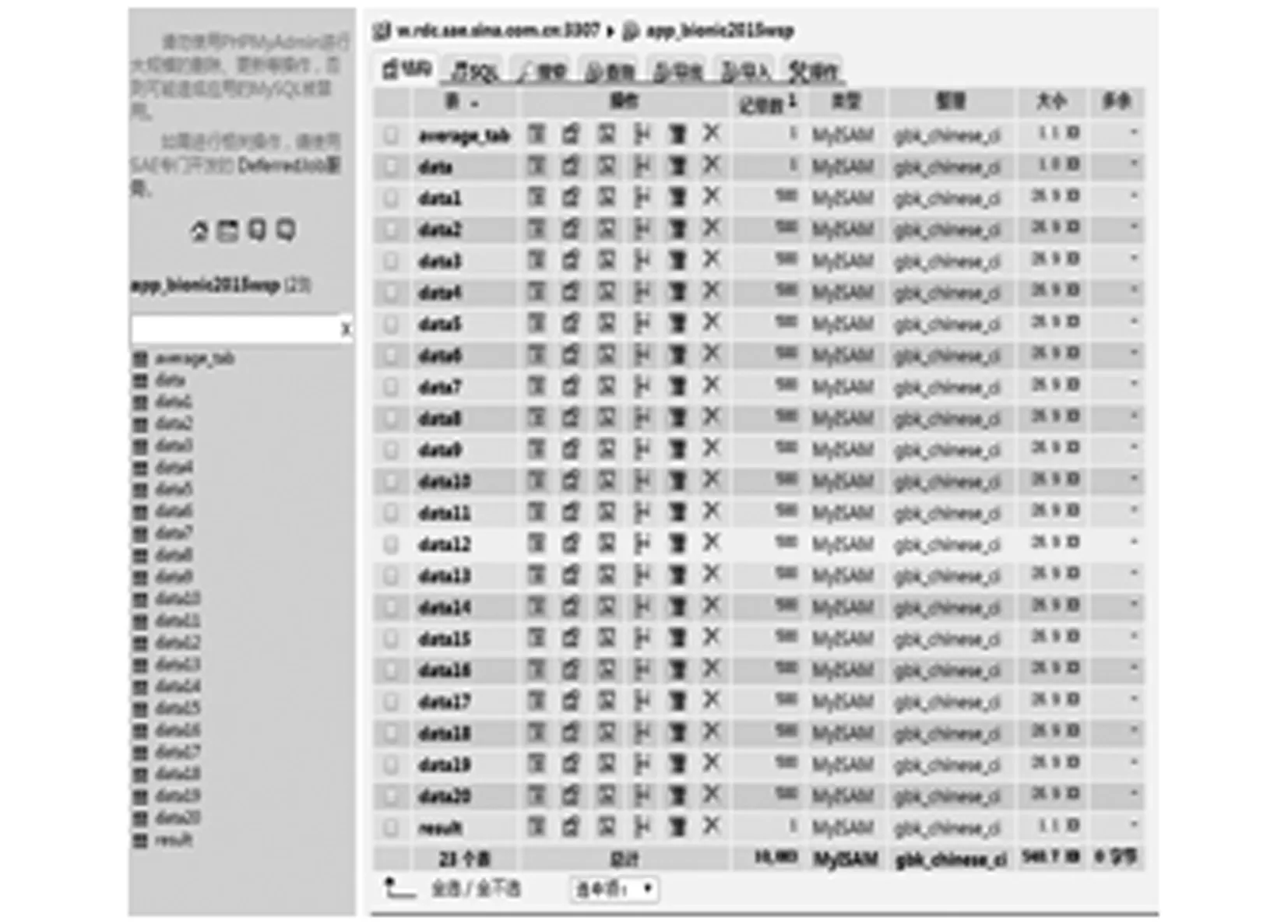
图4 MySQL
3仿生偏振导航测量误差分析
为了使仿生偏振导航系统在实际现场高精度自动运行,本文采取不同天气状态下,对多单体反复操作的“测量-计算-搜寻-分析-描述-提高”研究方案对测量误差进行分析研究,获取误差参数值,从而对抑制测量误差提供评估依据。
3.1测量误差分析与研究
单体的测量误差包括由噪声、热效应等环境引起的随机误差和由机械结构等原因引起的仪器误差。本文针对多单体测量过程中产生的随机误差、仪器误差进行分析与研究。步骤如下:
步骤1: 平均分布单体
在一个直径为d的圆形区域内(基于前期实验经验,误差容忍区无交叉,且d优选5 m到10 m)平均分布24个单体,且单体上标注的90°方向与示意图中的射线方向重合(如图5所示),令其在实验过程中静止不动。同一时刻对所有单体进行方位角测量,由于单体测角范围是0°~180°,且同一直线上的单体的方位角相同,则一组实测数据相当于13个单体测量数据(由于0°和180°记为两个单体)。选取一个单体方位角φi为0°参考方向,求其余单体方位角φi的相对方位角φ1相对角度φk.
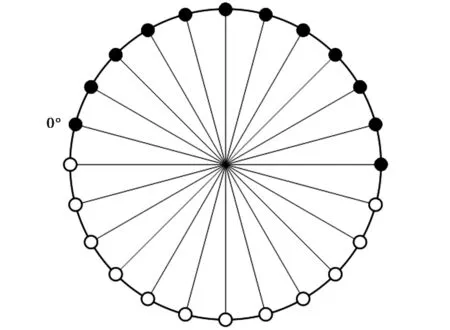
图5 多单体分布示意图
步骤2: 单体方位角测量
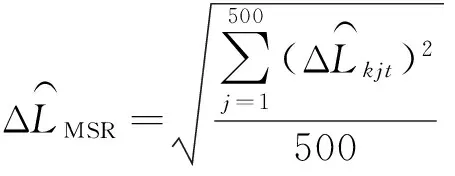
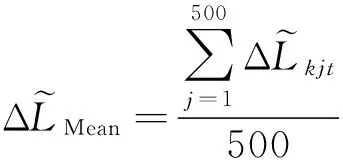
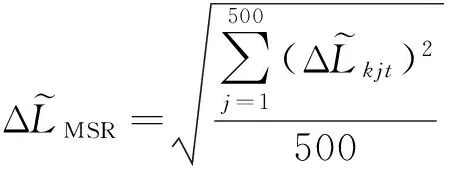
在单体平均分布的确定区域中,同时对各单体执行方位角测量计算,记为一组观测值。将第j组中第k号单体所有t次的实验测量值Lkjt序列记为等效长度Lkjt.k是单体编号,k=1,2…13; t为实验序号,t=1, 2, …, 500.
步骤3: 统计学误差计算

步骤4: 单体方位角估计值计算
对每组中每个单体的等效长度Lkjt(t=1, 2, …, 500)进行Kalman滤波,获取最有估计值序列值L″kjt.本文涉及到的Kalman滤波为适合于本实验系统的线性随机卡尔曼滤波算法[18],可使得随机误差足够小,仪器误差占主导地位,从而得到以仪器误差为主的估计值曲线L″kjt.
步骤5: 单体方位角高精度准真值

步骤6: 单体方位角等效长度仪器误差的分离
步骤7: 单体方位角等效长度随机误差的分离

步骤8: 重复计算求误差参数值
令t=t+1,基于云平台系统进行云计算,获得上述各参量的平均值,如图6所示。以这些参数为评判标准,可以进行仪器和环境的系统误差来源分析,为抑制系统测量误差提供依据。
3.2算法设计
本文中实验得到的大量数据分别存储在云端,例如多单体1组,多单体2组…的数据存在数据库数据表data1(如图7所示),data2…中,形式如下:
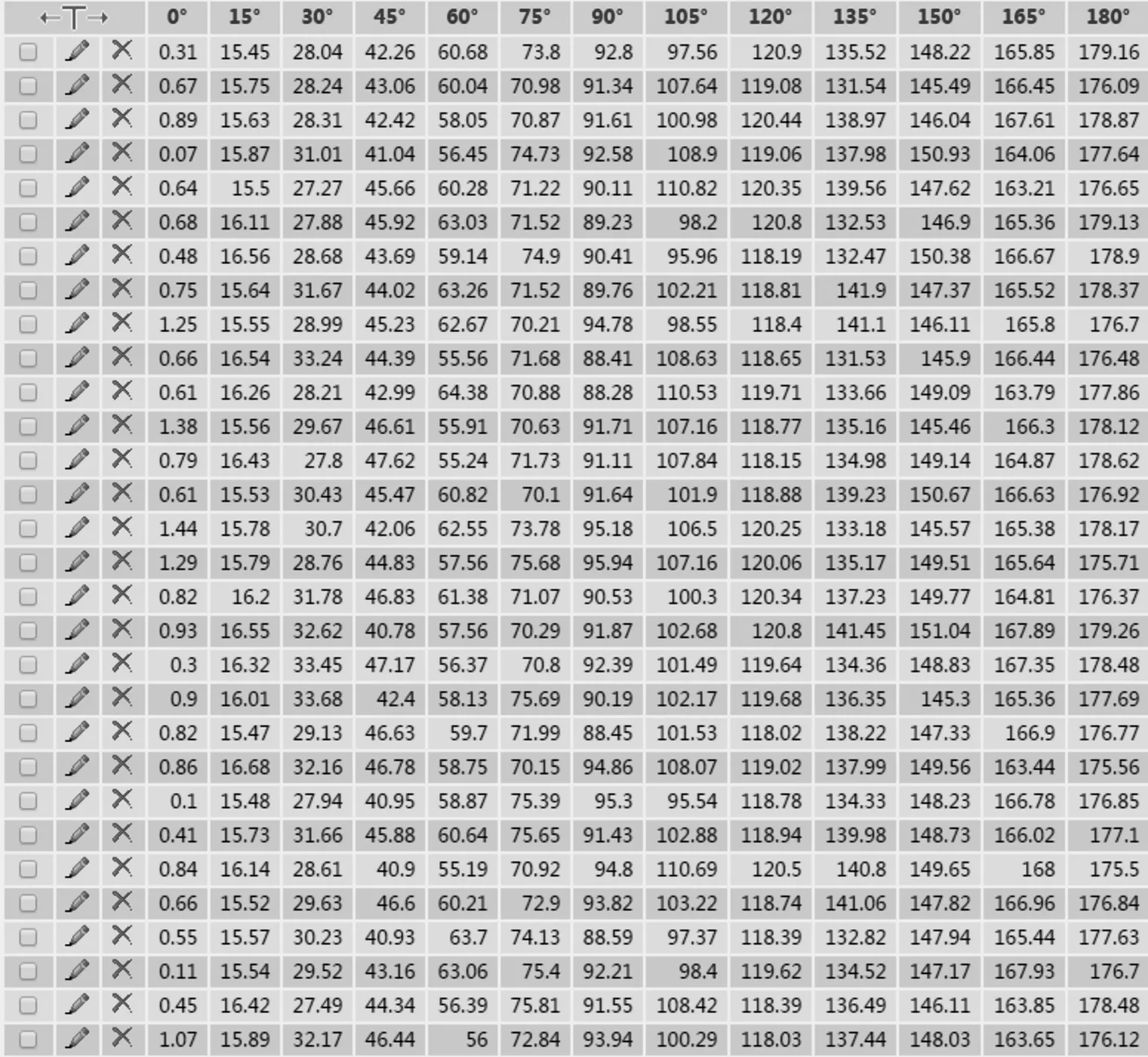
图7 第1组多单体数据表
主要代码:
1) 页面可视化
此模块由html代码编写,采用结构设计,用以显示用户查看的主页面。
top. php:显示该应用的题目信息。
left. php:显示该应用的功能信息。
right. php:显示结果信息。
2) 数据库操作
本文中所用的算法多是基于数据库,将数据库的连接,以及对数据库的增删改查操作封装成一个类SqlTool.class。
function execute_dql($sql):实现对数据表的查询;
function execute_dml($sql):实现对数据表的增加,删除,修改操作。
3) 数据处理
云平台系统根据用户需要实现的功能信息调用数据处理算法,读取用户的输入信息[19],以及选择性实现功能算法。在数据预处理中,有用到求均值算法average.php,以及Kalman滤波算法Kalman. php.
其中,Kalman 滤波算法是结合协方差迭代循环来估算系统的最优化输出。利用系统的过程模型,预测下一过程的状态值。
系统可用一个随机噪声的线性离散动态系统数学模型表示为

(1)
式中: W(k)为过程噪声; V(k)为 观测噪声。H为系统参数,两者均假定为高斯白噪声。其中W(k)过程噪声的协方差为Q.
假设现在的系统状态是k,根据系统的模型,可以基于系统的上一状态而预测出现在状态:
X(k)=AX(k-1)+BU(k),
(2)
式中: A、B和H为系统参数; U(k)为现在状态的控制量,本系统无控制量,令U(k)=0;
P(k)=AP(k-1)A′+BQB′,
(3)
式中: P(k)为X(k)对应的协方差; A′为A的转置矩阵。
式(2)、式(3)就是对系统的预测。
现在状态k的最优化估算值X(k):
X(k)=X(k-1)+Kg(Z(k)-HX(k-1)),
(4)
式中:Kg为卡尔曼增益(Kalman Gain); Z(k)为k时刻的测量值,即为实验测量数据值。其中:
Kg=P(k)H′/(HP(k-1)H′+R).
(5)
为了要让卡尔曼滤波器不断的运行下去直到系统过程结束,需要更新k状态下X(k)的协方差:
P(k)=(I-KgH)P(k-1),
(6)
式中, I为1的矩阵,本系统属于多模型多测量,则I为单位矩阵。当系统进入k+1状态时,P(k)就是式(3)的P(k-1).该算法可以实现自回归运算,获取随机误差足够小,仪器误差占主导地位的最优值。
4) 功能算法
本系统实现以下两大功能:①查看多单体数据信息:show_tab_info($table);②测量误差分析:仪器误差分析sys_err.php和随机误差分析sur_err.php。其分析结果是获取误差参数值:
functionarr_aver($arr);
functionarr_max($arr);
functionarr_msr($arr).
4结果分析
4.1偏振导航数据获取
通过在SAE云平台上,建立仿生偏振导航误差分析应用,采用PHP技术等一系列操作,完成云计算。访问主界面以及实现功能如下:
功能1: 通过输入查询多单体数据信息(组号1~20),如输入多单体第1组数据,则可以得到如图8所示的结果。
图8 主界面
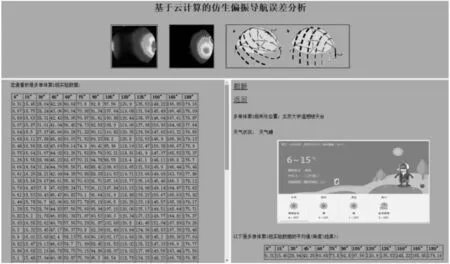
图9 多单体第1组数据信息
如图9所示,左页面显示查询多单体的数据信息。右页面显示查询多单体的位置,天气状况信息,以及多单体数据的平均值信息。其中,点击返回连接,可以重新查询。点击刷新连接,可以刷新多单体数据信息、位置信息以及天气状况信息。
功能2: 当用户输入查询某组多单体信息后,系统会自动保存组号值。如果用户没有任何输入,则系统输出默认信息。通过误差分析选择分析算法,获得测量误差参数值最大误差值,误差平均值,误差均方根。
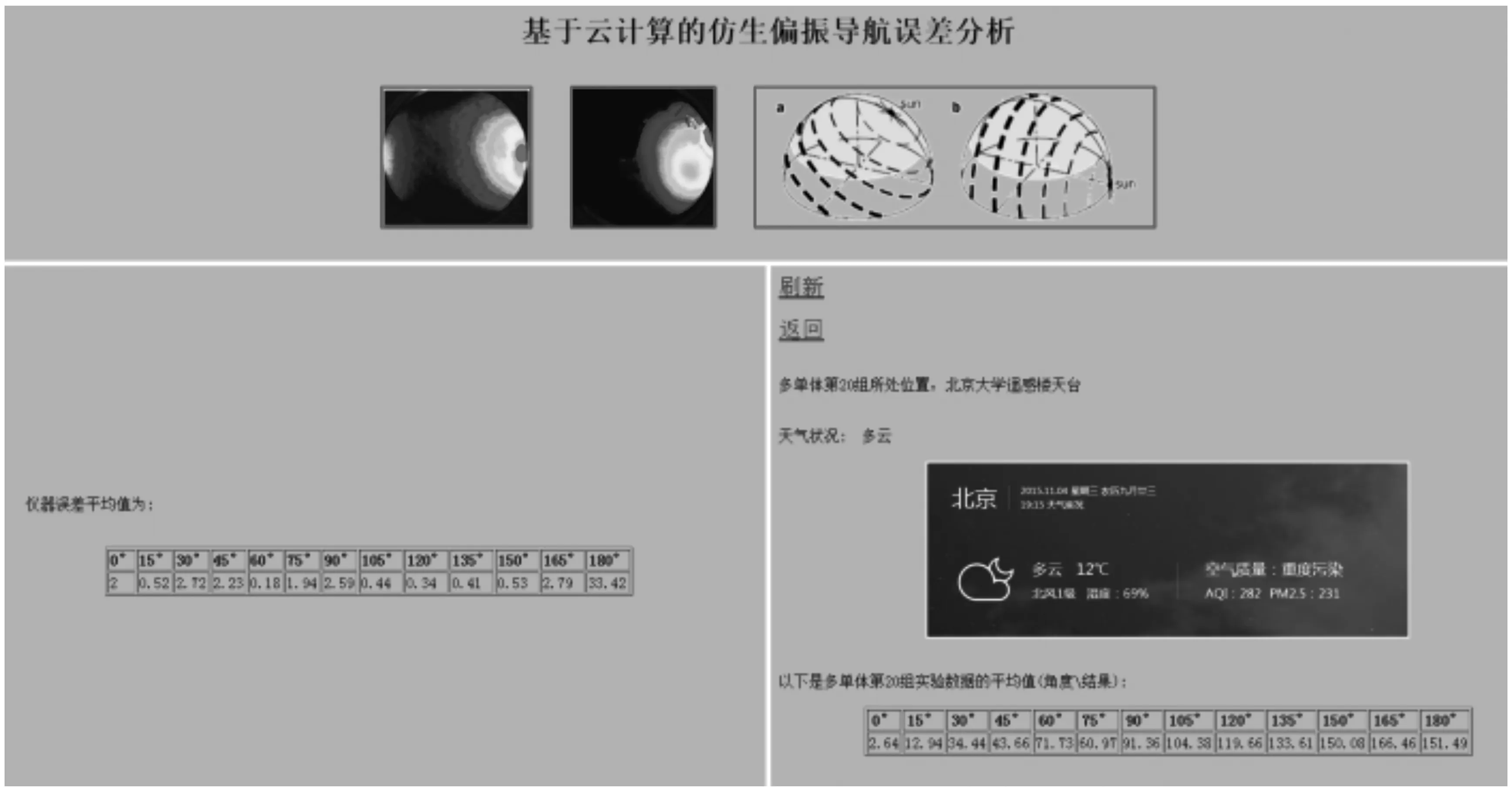
图10 多单体第20组仪器误差平均值
若查询仪器误差平均值,则左页面就会显示结果,如图10所示。右页面显示多单体信息:多单体的位置、天气状况信息以及多单体数据的平均值信息。
4.2测量误差分析

求取20组多单体数据信息,每组13个单体,且每一组的每个单体测量500个样本值,求其测量误差参数值,并将其结果整合并分析,如图11所示。

图11 测量误差参数
误差最大值可以查看测量结果偏离真值的最大程度,误差平均值可以反应测量结果误差的整体情况,均方根值可以反应测量结果误差的离散度。
从以上实验结果可知,晴天状态下,测量结果整体平稳(平均值<2°,均方根<4°)。其中,仪器误差在170°~180°方向的仪器误差比较大,不能实现导航的精确定位;随机误差均小于4°.多云状态下,同样地,仪器误差在170°~180°误差比较大;另外,随机误差很大,其中随机误差最大值均在10°~25°之间,均方根值也高达10°.
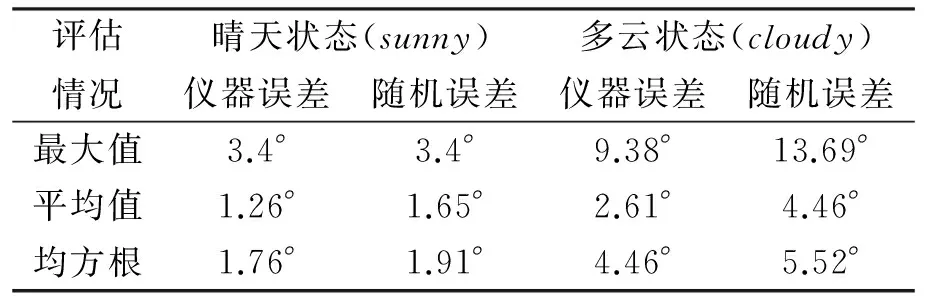
表1 单体误差评估
综上,在不同天气情况下,对仿生偏振导航仪器测量方位角的误差值进行评估,图11示出了13个单体的平均实验数据,表1示出了单个单体(导航单元)的误差值进行评估。
在测量过程中,天气状态对仪器本身带来系统误差影响较小,但会很大程度上影响测量的随机误差值,随机误差值波动比较大,最大误差值13.69°,离散度5.52°.从实验结果来看,虽然天气情况对测量结果的影响比较大,但在可控范围之内,可以通过添加测量误差补偿,从而实现导航定位。
5结束语
本文详细介绍了基于SAE云平台的仿生偏振导航系统中的测量误差分析。
云平台系统主要包括数据存储、云计算和可视化三个模块。通过访问浏览器,简化用户操作,实现资源共享。其中,以仿生偏振导航测量误差分析为应用,获取误差参数,从而为抑制测量误差,提高测量精度提供评估依据。具体算法操作流程主要是选取不同天气情况下,对多组多单体采集大量的实验数据,并在云平台上进行数据处理,获取误差参数值。其云计算算法是采用PHP技术编码实现。最后,对云平台得到的测量误差参数值进行了详细分析并总结评估。整个系统的开发工程灵活高效并且方便以后功能的扩展与改进。
参考文献
[1]HOWMJ,CHRISTYJH,TEMPLESE, et al.Targetdetectionisenhancedbypolarizationvisioninafiddlercrab[J].CurrentBiology, 2015, 25(23): 3069-3073.
[2] 张帅. 基于天空偏振光的仿生定向传感器设计及其导航应用[D].合肥:中国科学技术大学,2015.
[3]ALEXANDROVMD,CAIMSB,WASILEWSKIAP, et al.LiquidwatercloudpropertiesduringthePolarimeterDefinitionExperiment(PODEX)[J].RemoteSensingofEnvironment, 2015,169(11): 20-36.
[4] 晏磊, 关桂霞, 陈家斌, 等. 基于天空偏振光分布模式的仿生导航定向机理初探[J].北京大学学报·自然科学版, 2009, 45(4): 616-620.
[5] 关桂霞, 晏磊, 陈家斌, 等. 天空偏振模式图动态特性分析[J]. 计算机应用与软件, 2009, 26(12): 179-181.
[6] 褚金奎, 赵开春, 王体昌, 等. 仿生偏振导航传感器试验模型的构建与标定[J]. 微纳电子技术, 2007(7/8):37-379,406.
[7]CHUJK,ZHAOKC,ZHANGQ, et al.TichangWang.Constructionandperformancetestofanovelpolarizationsensorfornavigation[J].Sensors&ActuatorsAPhysical,2008,148(1):75-82.
[8]XUZW.Cloud-seacomputingsystems:Towardsthousand-foldimprovementinperformanceperwattforthecomingZettabyteera[J].JournalofComputerScienceandTechnology, 2014,29(2): 177-181.
[9] 许守东.云计算技术应用与实践[M]. 北京:中国铁道出版社,2013: 180-199.
[10]ZHAOKC,CHUJK,HANGTC,et al.Anovelanglealgorithmofpolarizationsensorfornavigation.[J].IEEETransactionInstrumentationandMeasurement,2009,58(8):2791-2795.
[11]关桂霞. 仿生偏振导航定向机理及实验验证研究[D].北京:北京理工大学,2010:72-74.
[12]杨文剑, 杨彬, 路颖, 等. 偏振导航新方法及实验分析[J]. 全球定位系统,2013, 38(3): 25-29.
[13]白志杰. 基于SAE的云计算PaaS实践教学方案设计[J]. 电子制作,2014(14):49-50.
[14]百度. 新浪云[EB/OL]. 2015-03-15.http://www.sinacloud.com/doc/intro/architecture.html.
[15]赵开春, 褚金奎, 张强,等. 新型仿生偏振测角传感器及角度误差补偿算法[J]. 宇航学报, 2009, 30(2):503-509.
[16]晏磊,陈伟,杨彬,等.偏振遥感物理[M]. 北京:科学出版社, 2014:201-222.
[17]樊宁. 云数据库的关键技术探析[J]. 电子技术与软件工程,2015(19):200.
[18]POSSELTDJ,HODYSSD,BISHOPCH.Errorsinensemblekalmansmootherestimatesofcloudmicrophysicalparameters[J].MonthlyWeatherReview, 2014, 142(4): 1631-1654.
[19]吕永国,杨斌,彭之军. 基于PHP的网页信息抽取[J]. 科技展望,2015,23(5):29-32.
吴水平(1991-),女,硕士生,主要从事基于云计算的仿生偏振导航方面研究。
关桂霞(1972-),女,博士,副教授,主要从事仿生偏振导航领域的研究。
焦健楠(1988-),男,硕士生,主要从事遥感领域偏振方面的研究。
Measurement Error Analysis of Bionic Polarization Navigation Based on Cloud-sea Computing
WU Shuiping1,2,GUAN Guixia1,JIAO Jiannan2,WANG Xueqi2,KE Zibo2,CHU Jinkui3,YAN Lei2
(1.InformationEngineeringCollege,CapitalNormalUniversity,Beijing100048,China;2.BeijingKeyLabofSpatialIntegrationandItsApplications,PekingUniversity,Beijing100871,China; 3.MechanicalEngineeringCollege,Dalian116023,China)
Abstract: Bionic polarization navigation is an autonomous navigation method that uses natural polarization characteristics. There is a relationship among distribution pattern, position and heading angle of navigation unit in different weather conditions. This paper proposes a method to correct the system error by using measure error parameters. The accuracy of measurement is critical to navigation. This work focuse on the surveying of azimuth angle under different weather conditions. Then we use cloud computing to analyze the system error and random error of the measured data and acquire the error evaluation parameters. The results provide the evaluation basis for improving the surveying accuracies.
Keywords:Cloud computing; bionic; polarization; navigation; error
doi:10.13442/j.gnss.1008-9268.2016.02.008
收稿日期:2015-11-24
中图分类号:V448
文献标志码:A
文章编号:1008-9268(2016)02-0043-07
作者简介
资助项目: 国家自然科学基金(批准号:61174220)
联系人: 吴水平E-mail: wushuiping2015@163.com