精密单点定位在导航用户一体机定位精度测试中的应用
2016-06-22陈星宇陈猛李建文王世忠
陈星宇,陈猛, 李建文,王世忠
(1.信息工程大学 导航与空天目标工程学院,郑州 450001;2.81804部队,大连 116031)
精密单点定位在导航用户一体机定位精度测试中的应用
陈星宇1,陈猛1, 李建文1,王世忠2
(1.信息工程大学 导航与空天目标工程学院,郑州 450001;2.81804部队,大连 116031)
摘要:由于导航定位产品在实际场景中的定位精度测试评估方法还不完善,受实测条件的限制较大,其中定位精度测试所用的基准多采用载波相对定位的方式获得,受基站与载体之间距离的限制较大,往往不能很好地评估产品精度。而精密单点定位在事后动态测量中可以得到和双差载波相对定位相当的精度,而且不受地域的限制,有其独特的优势。本文基于事后动态精密单点定位的方法,提出了一种切实有效的定位精度测试评估方法,并对某导航用户一体机定位精度进行测试评估。
关键词:GNSS导航定位产品;精密单点定位;定位精度测试评估
0引言
近年来,随着全球卫星导航系统(GNSS)的不断发展和完善,导航由传统的GPS时代进入了GNSS时代。相应的导航定位产品也层出不穷,在人们的日常生活中扮演着越来越重要的角色。随着导航技术及产品的快速发展,与之相对应的导航产品的测试评估技术也在不断进步。导航产品的评估,主要指针对导航接收机产品的评估,可分为两种,即实际场景测试评估和基于卫星信号仿真器的测试评估。对导航用户一体机性能进行测试,重点是验证导航定位产品采集和跟踪卫星信号的能力,检测产品在不同功率电平和不同条件下计算定位的能力,通常包括灵敏度测试、首次定位时间测试、定位精度测试以及各种偏差情况下的复杂场景测试[1]。由于灵敏度,首次定位时间等相应的项目测试属于接收机模块的测试,在购进接收机模块之前由接收机模块生产厂家测试完成。导航用户一体机不仅包括导航定位模块,还包括惯导模块,GIS地图模块,位置坐标计算等模块。而惯导模块在实验室仿真测试中无法实现,因此对导航用户一体机进行实际场景测试很有必要。
1997年,Zumberge提出了精密单点定位(PPP)
技术。PPP技术是指利用单台GNSS接收机,通过引入外部空间和时间基准(主要是指卫星精密轨道和卫星精密钟差)来获取接收机的精密位置的一种定位技术,具有成本低、操作简单、定位精度高等优势[2]。精密单点定位可以实现亚分米级的动态定位, 能在不需要地面基准站的条件下达到双差固定解相当的精度水平[3]。
本文采用精密单点定位动态测量模式,在导航用户一体机定位精度测试评估试验中为被测试产品提供位置基准。通过对野外实验结果进行分析,论证了PPP在导航用户一体机定位精度测试中的可行性,同时也为导航用户一体机产品定位精度测试评估提供了一种可行的评测方案。
1精密单点定位模型
PPP通过引入IGS提供的卫星精密轨道和钟差,利用双频消电离层组合测码伪距和载波相位观测量,估计接收机坐标、接收机钟差、天顶对流层延迟和载波相位模糊度这四类参数,其单历元观测方程为[4-5]
(1)

2精密单点定位精度分析
测试过程分为静态定位精度测试和动态定位精度测试。在静态定位精度测试实验中,基准点采用静态精密单点定位模式进行测量,采用天解结果作为基准点最终的位置坐标。图1示出的是精密单点定位内符合精度。在动态定位精度测试实验中,动态精密单点定位数据采集于郑州市周边一段观测条件比较好的路段,实验场所比较空旷,没有树木,高楼等的遮挡。同时在周边架设基准站,进行同步观测,应用相对定位测量模式检验动态精密单点定位精度。图2示出的是动态精密单点定位外符合精度。
由以上精密单点定位精度分析可知,静态精密单点定位精度在厘米级,动态精密单点定位精度达到亚分米级。尽管达不到动态相对定位的厘米级水平,但足以代替相对定位作为导航用户产品定位精度测试评估的基准。需要注意的是,动态精密定位对观测条件,数据质量的要求比较高,所以测试需在开阔地带进行,保证采集数据的质量。
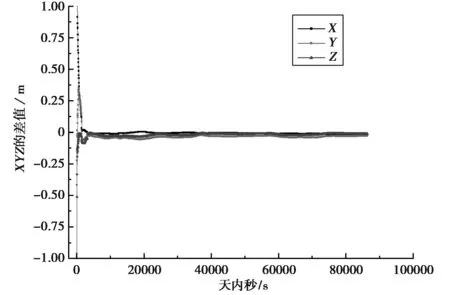
图1 静态精密单点定位
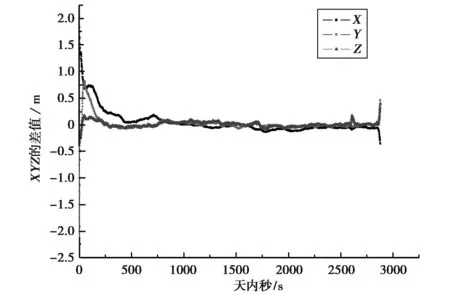
图2 动态精密单点定位
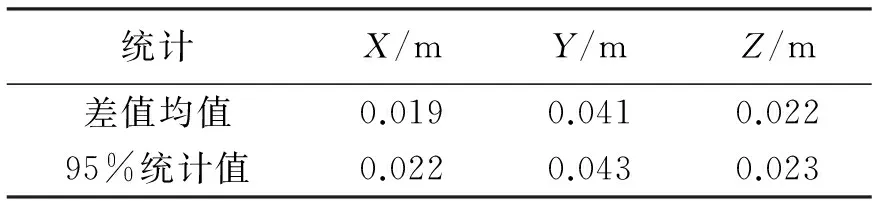
统计X/mY/mZ/m差值均值0.0190.0410.02295%统计值0.0220.0430.023
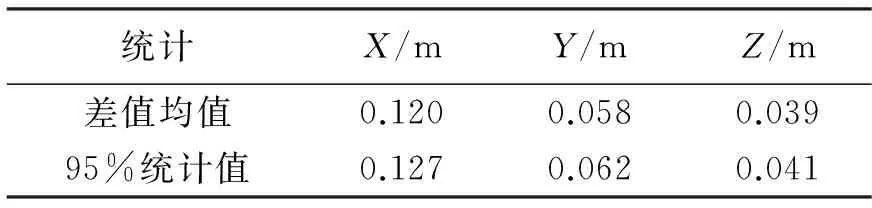
表2 动态精密单点定位结果统计分析
3导航用户一体机定位精度测试评估
本次对导航用户一体机定位精度的测试主要进行了不同环境情况下的定位精度测试、信号中断后惯导定位精度有效时间、卫星信号重连后恢复时间等测试。实验于2015年5月5日进行,用NovAtel DL-V3接收机架设在基准点用于提供基准坐标。被测产品为市场中选取的某一导航用户一体机,承诺定位精度10 m.
3.1定位精度测试评估
定位精度的测试评估可分为静态定位精度评估和动态定位精度评估。静态定位精度是指导航产品在静止的情况下对其进行测量,所测得的位置坐标与真实坐标的差值。动态定位精度是指导航产品在运动过程中进行定位测量,将位置信息与PPP求得基准位置信息进行比较。
本次在实验静态定位精度测试中,首先对基准点进行静态精密单点定位,采用天解结果做为基准点坐标;然后将用户一体机天线架设在基准点上,由于用户一体机天线定位精度在米级,所以架设上允许存在厘米级的偏差;最后将测得的结果与基准点坐标进行比较,评价该产品的精度。而动态定位精度测试采用车载形式进行。将两台NovAtel DL-V3接收机架设在导航用户一体机天线两侧,而导航用户一体机位于基准接收机中央,对基准接收机分别进行动态精密单点定位,导航用户一体机采用接收机实时输出的普通单点定位解(承诺定位精度10 m)。以基准接收机每个历元坐标的平均值作为基准坐标,与导航用户一体机所测位置进行比较,从而评价其精度。
具体测试精度结果如图3、图4、表3、表4所示。
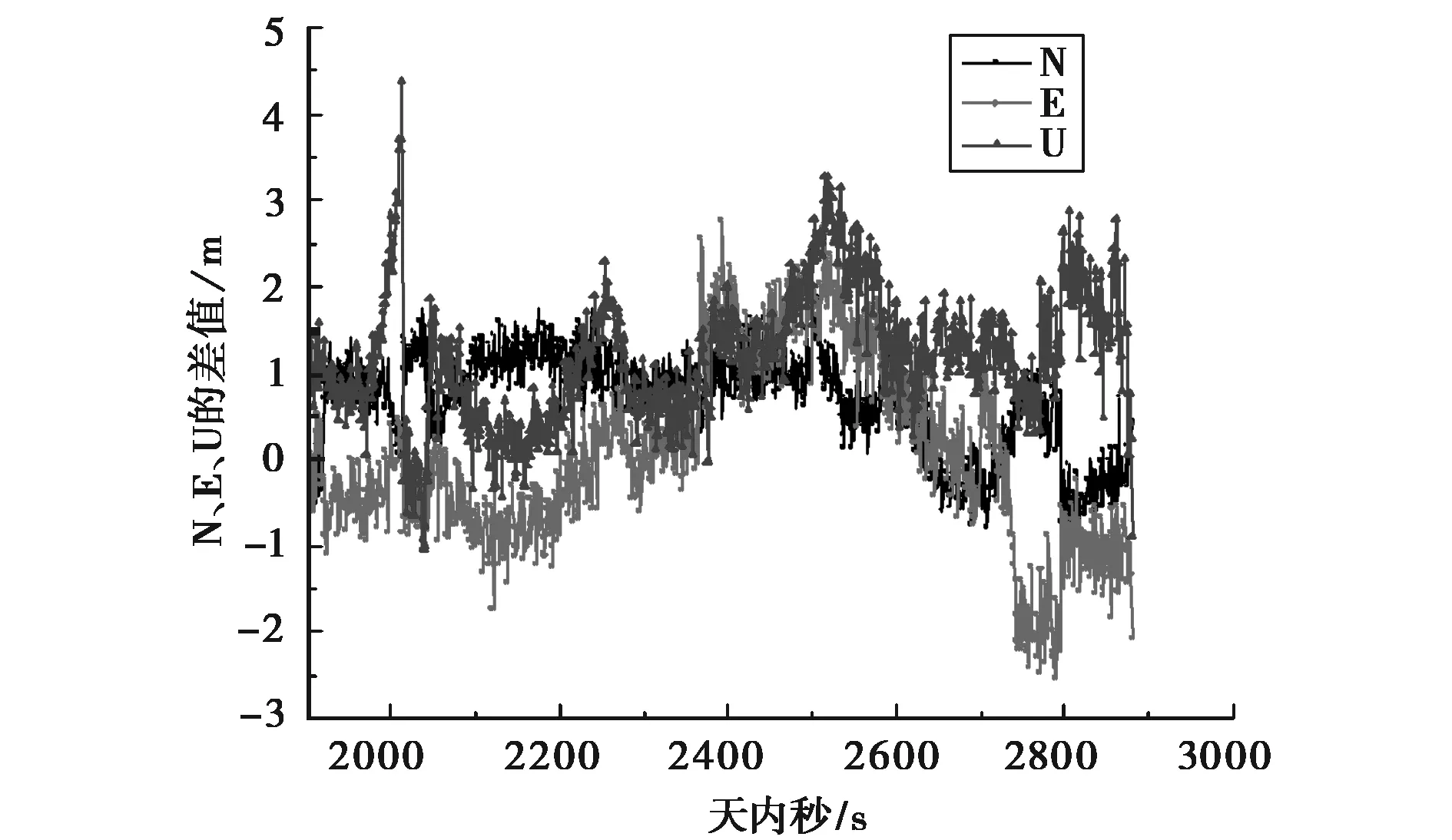
图3 导航用户一体机静态定位精度测试评估
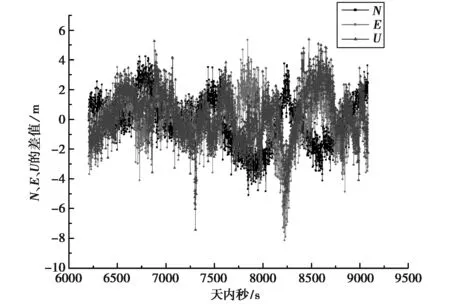
图4 导航用户一体机动态定位精度测试评估
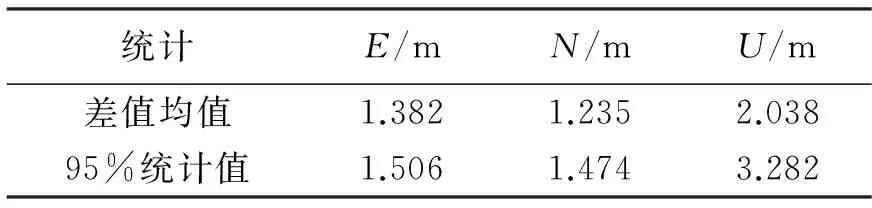
表3 导航用户一体机静态定位精度测试
表4 导航用户一体机动态定位精度测
3.2复杂场景测试评估
复杂场景测试是指在各种不同的测试场景下对导航接收机的定位性能进行测试[1]。可能涉及的场景包括
1) 地理环境影响
当导航用户接收机处于较为复杂的地理环境中,如高楼林立的城区,依据建筑物的大小和方位的不同,会对卫星信号产生不同的影响。
2) 遮挡
卫星信号完全被建筑物或隧道等遮蔽,导航用户接收机将不能继续锁定该信号,遮挡持续的时间取决于特定的地理环境。
由于试验中既要完成复杂环境的定位精度测试,又要保证基准点的定位精度。因此此场景实验采用人为的方式对复杂环境进行模拟。
3.2.1高楼密集场景定位精度测试评估
在导航用户一体机天线两侧安置可以自动竖起放下的挡板用于模拟高楼所带来的遮挡,同时保证挡板对基准点处接收机不造成干扰。模拟移动载体在城市道路上行驶,道路两侧有高层,楼层预计为50层,高约200 m.依比例换算成挡板高度设置在接收机两侧,测试时长约20 min.在实验过程中,基准接收机可见卫星数8颗,导航用户一体机可见卫星数5颗。定位精度测试结果如图5和表5所示。
测试评估结果表明,用户一体机可以适应城区比较复杂的应用环境,基本能够达到厂家所承诺的定位精度,可以满足用户的基本需求。
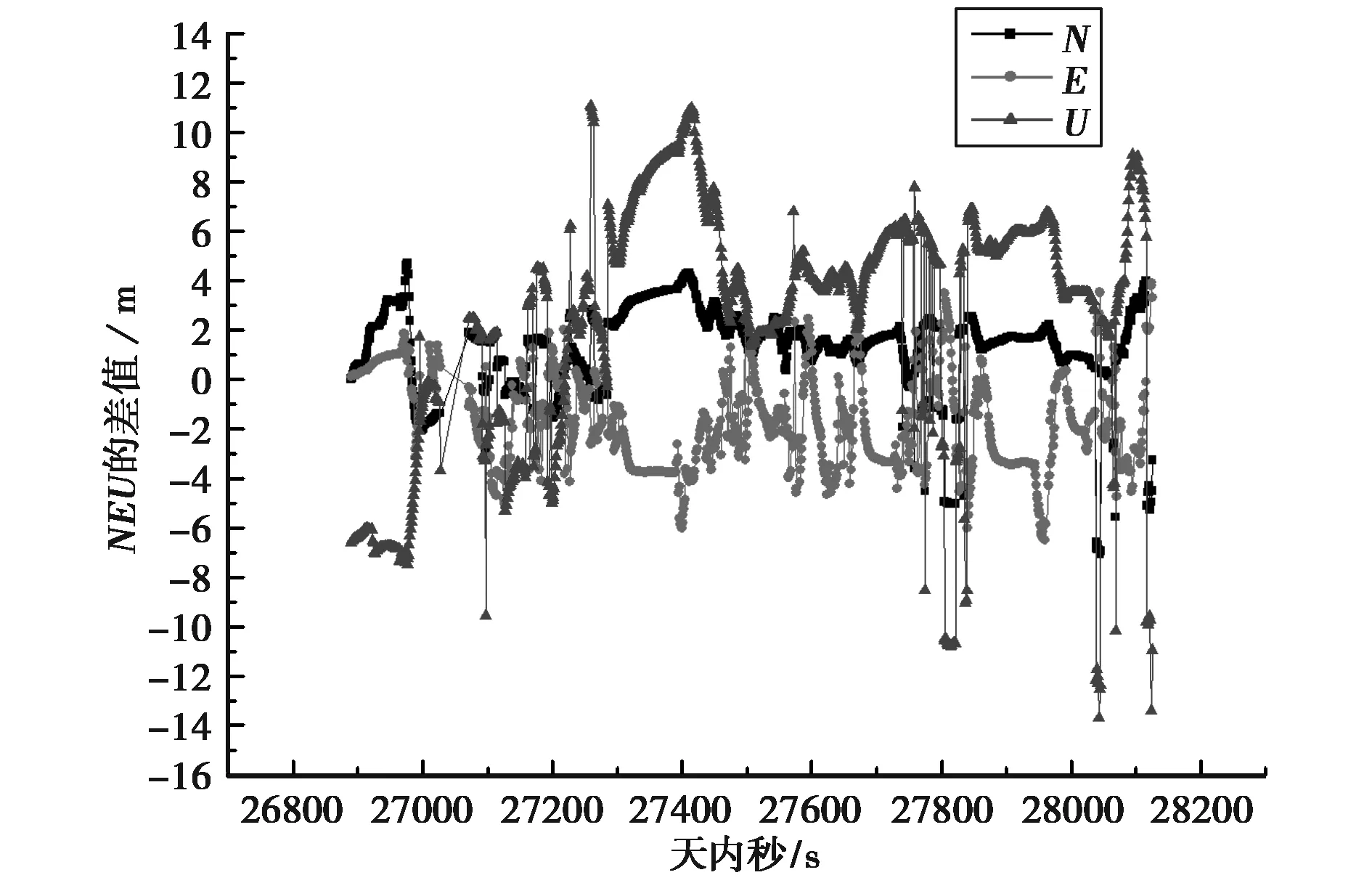
图5 模拟城区楼群对信号遮挡时定位精度测试评估
统计E/mN/mU/m差值均值1.8712.1335.03295%统计值1.9392.2435.181
3.2.2信号完全被遮挡场景定位精度测试评估
信号完全被遮挡场景测试评估实验主要测试信号被完全遮挡后惯导模块导航定位的有效时间及恢复信号接收后,获得有效定位所需的时间。因此采用插拔导航用户一体机天线的方式对导航用户一体机模拟信号被完全遮挡的场景。
在这个实验时段内,22 503(天内秒)接连天线,测试重新获得信号后获得定位所需时间;22 840拔掉天线,模拟隧道场景;24 155接连天线,恢复正常定位状态。其中23621~23890期间,无坐标输出。在这个时段内,其中23703~23724和23964~24068,导航用户一体机显示未定位状态。基准接收机可见卫星数8颗,导航用户一体机可见卫星数8颗。定位精度测试结果如图6,图7和表6所示。
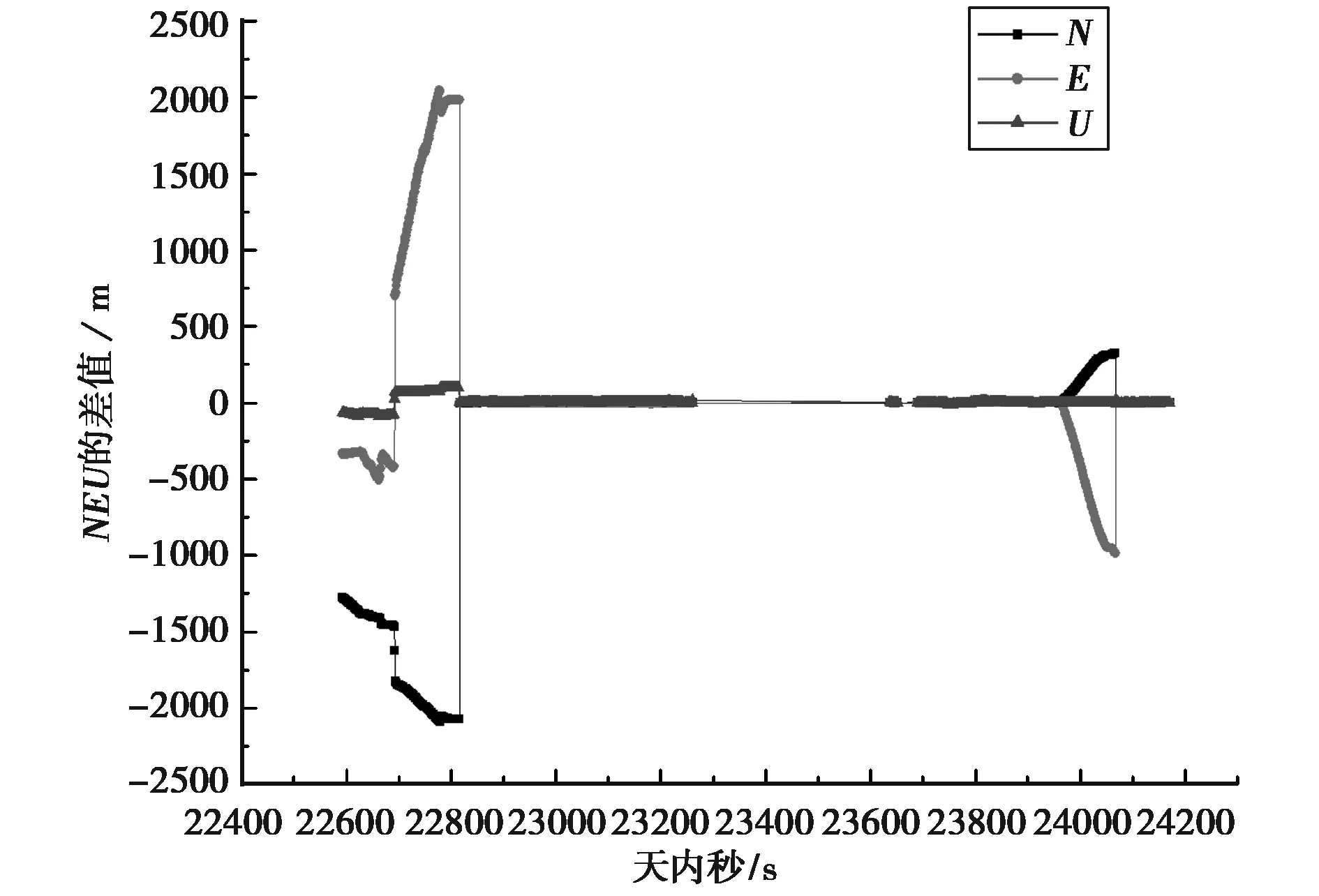
图6 模拟隧道信号遮挡定位精度测试评估
测试评估结果表明,用户一体机从开始至定位正确(以承诺10 m的2倍为限值),约需300 s.与产品承诺冷启动定位时间5 min相符。从拔掉天线到定位失效(以承诺10 m的2倍为限值),约400 s.
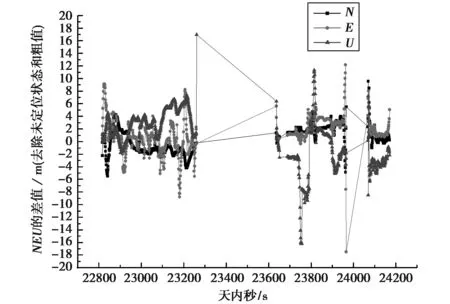
图7 模拟隧道信号遮挡定位精度测试评估(剔除粗值)
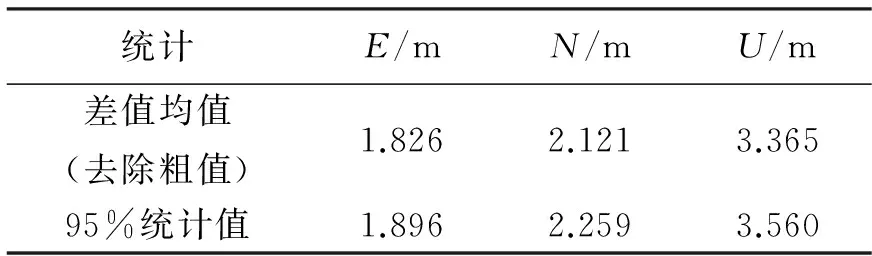
统计E/mN/mU/m差值均值(去除粗值)1.8262.1213.36595%统计值1.8962.2593.560
4结束语
本文通过对导航用户一体机测试评估结果的分析表明,精密单点定位以其亚分米级的定位及测量模式不受基站限制等优势应用到用户产品测试中去,取代相对定位模式,作为用户产品测试评估时提供测量基准的方法。值得注意的是动态精密单点定位对测量条件、数据质量要求比较高。因此接下来要对动态多系统精密单点定位,精密单点定位快速收敛等方向进行研究并应用到实践中,为导航未来的发展提供理论保障和技术支撑。
致谢:感谢信息工程大学iGMAS分析中心给予的帮助和支持。
参考文献
[1] 芮艳华,要鹏.安捷伦导航接收机测试方案[J]. 国外电子测量技术,2013:6-9.
[2] ZUMBERGE J M. HEFLIN D. JEFFERSON M.etal.Precise point positioning for the efficient and robust analysis of GPS data from large networks[J].Journal of Geophysical Research: Solid Earth,1997(102): 5005-5017.
[3] ZHANG Xiaohong, LIU Jingnan. PPP for long-range airborne GPS kinematic positioning.[C].//Vi Hotine-Marussi Symposium on Theoretical And Computational Geodesy IAG Symposium, 2006:211-215.
[4] 李征航,黄劲松. GPS测量与数据处理[M]. 武汉:武汉大学出版社,2008.
[5] 李建文,李军正. 卫星导航原理与应用[M]. 郑州:解放军测绘学院,2013.
[6] 阮仁桂.GPS 非差相位精密单点定位研究 [D] .郑州:解放军信息工程大学,2009.
[7] 叶世荣. GPS 非差精密单点定位理论与实现 [D].武汉:武汉大学,2003.
陈星宇(1989-),男,河北唐山人,硕士,现从事精密单点定位和完好性等方向研究。
陈猛(1988-),男,河南商丘人,硕士生,现从事卫星导航系统工程。
李建文(1971-),男,浙江富阳人,教授,现从事卫星导航系统工程与应用研究。
Application of PPP in the Positioning Accuracy Test of Navigator
CHEN Xingyu1,CHEN Meng1,LI Jianwen1,WANG Shizhong2
(1.InstituteofNavigationandSpaceTargetEngineering,InformationEngineeringUniversity,Zhengzhou450001,China;2.Troops81804,Dalian116031,China)
Abstract: Because methods of positioning accuracy test and assessment of navigator in practical scene is imperfect and is limited by the environment of practical scene. In these methods, common method uses carrier phase relative positioning to achieve reference point coordinate in the positioning accuracy test of navigator. The accuracy of reference point coordinate is limited by the distance between reference station and the datum station. With the distance enlarged, the accuracy of reference point gradually declines and test mission wound be imperfectly accomplished. However, it can be achieved by dynamic PPP that the accuracy equaled with the accuracy of carrier phase relative positioning. The positioning mode of dynamic PPP has some special advantage, such as single station, global positioning. In this paper, based on dynamic PPP, a new method of positioning accuracy test and assessment is proposed. And used this method, a positioning accuracy test and assessment of navigator demonstrate that the method is feasible.
Keywords:GNSS navigator; PPP; positioning accuracy test and assessment
doi:10.13442/j.gnss.1008-9268.2016.02.007
收稿日期:2015-11-16
中图分类号:P228.4
文献标志码:A
文章编号:1008-9268(2016)02-0038-05
作者简介
联系人: E-mail: chenxingyu0201@163.com