卫星间水平距离对双差电离层残差的影响分析
2016-06-21刘卫华吴江飞栗广才赵才新
刘卫华,吴江飞,栗广才,赵才新
(信息工程大学 地理空间信息学院,河南 郑州 450052)
卫星间水平距离对双差电离层残差的影响分析
刘卫华,吴江飞,栗广才,赵才新
(信息工程大学 地理空间信息学院,河南 郑州 450052)
摘要:基于TCAR方法,对影响模糊度固定的电离层残差因素进行分析,指出同测站间基线的长短一样,差分卫星间的水平距离也能够影响双差电离层残差的大小,并用实测北斗三频数据验证。实验结果表明对17 km短基线,较大的差分卫星间水平距离会降低窄巷模糊度固定的成功率;而对于72.6 km的中等长度基线,当双差卫星间水平距离减小时双差电离层残差随之减小,利于窄巷模糊度的固定。
关键词:TCAR;北斗三频;模糊度固定;双差电离层残差;卫星间水平距离
北斗卫星导航系统是目前唯一的全星座播发三频信号的卫星导航系统[1],能够提供给用户三频的卫星导航信号。在三频情况下模糊度的解算与双频模糊度解算相比更为可靠[2],目前,三频模糊度解算方法主要有TCAR(ThreeCarrierAmbiguityResolution)和CIR(CascadeIntegerResolution)。TCAR是常用的快速确定三频模糊度的方法,最初由Harris提出[3-4,算法简单且避免LAMBDA方法的复杂搜索过程,能够实现模糊度的快速固定[5]。Vollath基于TCAR提出的综合TCAR方法充分利用所有可用的观测信息,能在一定程度上提高模糊度估值的可靠性[6]。针对TCAR方法中模糊度的固定易受双差电离层残差影响的问题许多学者都进行研究。文献[7]利用弱电离层组合观测量实现TCAR方法的三频模糊度解算;文献[8]和[9]利用解得的超宽巷和宽巷模糊度反求电离层残差,并对窄巷组合进行改正,最后经多历元数据平滑得到固定的窄巷模糊度;文献[10]提出一种中长基线无几何无电离层窄巷模糊度解算方法;文献[11]用两个超宽巷组合和一个窄巷组合构造无几何无电离层模型来求解窄巷模糊度。以上文献均是在基线较长时且双差电离层残差较大的情况下,研究如何减弱或消除电离层残差对窄巷模糊度固定的影响;本文在固定的两测站之间,研究不同差分卫星之间的水平距离(指在同一水平面上差分卫星间的距离,下文同)对双差电离层残差大小的影响。
1TCAR算法及其误差分析
TCAR算法的实质是利用两个特性较优的拍频组合,先解算波长最长的模糊度,作为已知精度较高的伪距观测值求解波长次长的模糊度,通过“逐级求解”的过程,最终确定初始模糊度的值[12]。参考文献[7]中有关线性组合的选取标准,表1列出本文所选用的超宽巷、宽巷和窄巷线性组合及其相应的电离层残差系数和噪声放大因子。
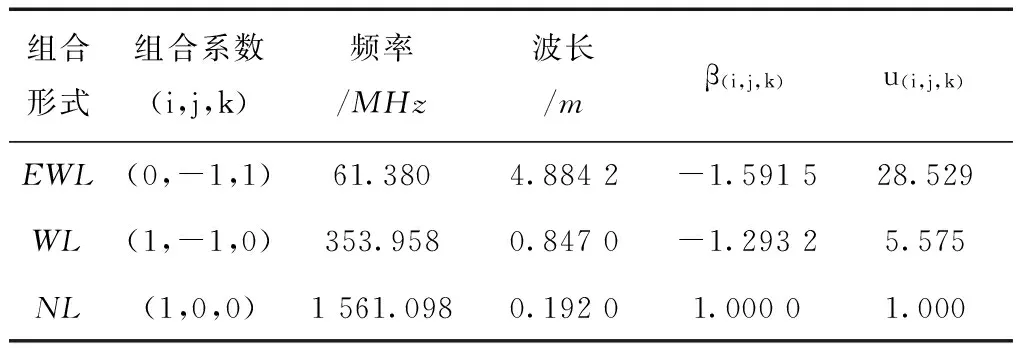
表1 线性组合观测值及相应的电离层系数和噪声放大因子
应用表1中的线性组合,则TCAR的解算步骤:
第一步:超宽巷模糊度的固定
(1)
第二步:宽巷模糊度的固定
(2)
第三步:窄巷模糊度的固定
(3)
第一步中超宽巷模糊度的固定为无几何无电离层组合,因此解算超宽巷模糊度时仅受观测噪声的影响。第二步和第三步中与几何有关的误差基本被消除,因此不考虑残留的轨道误差和对流层误差,所以宽巷模糊度和窄巷模糊度的解算仅受噪声和残留电离层误差的影响。
根据方差-协方差传播定律可计算出每一步模糊度浮点解的标准差:
(4)
假设非差伪距和载波相位的标准差分别为0.3m和0.002m,则相应双差观测值的标准差为0.6m和0.004m,代入式(4)可得
由以上各组合观测值的噪声中误差可知,由于超宽模糊度仅受噪声影响因此能单历元可靠的固定为整数;若残留电离层误差足够小则宽巷和窄巷模糊度也能以较高的成功率固定。假设噪声误差符合标准正态分布,则模糊度浮点解分别服从下列正态分布:
(5)
由式(5)可知电离层残差越大,宽巷和窄巷模糊度浮点解与正确模糊度的偏差也就越大。
2影响电离层残差大小的因素分析
由分析可知,电离层延迟误差对TCAR方法中模糊度的固定影响很大,而电离层的延迟与时间、地点以及太阳活动的程度等因素有关,因此很难准确地求出。为减弱电离层误差对模糊度固定的影响在两个测站和两个接收机间求双差,如图1所示。
对于固定的两颗卫星,当两测站之间的距离增大时,会使两测站间电离层延迟的相关性减弱,使得双差后残留的电离层误差增大,导致在中长基线情况下TCAR方法中窄巷模糊度难以准确固定的主要原因,因此必须设法消除或减弱才能得到较高的窄巷模糊度固定率。同理,在固定的两测站之间,如果差分卫星间的水平距离增大,同样会导致两测站间电离层延迟的相关性减弱,因而会引起双差后电离层残差增大,影响窄巷模糊度的固定。在北斗系统中,一般选择卫星高度角较大的GEO卫星作为星间差分的参考星,假设短时间内电离层变化比较平稳,则认为参考星到测站的电离层延迟不变,当差分卫星对中的另一颗卫星与参考星的水平距离增大时,导致该卫星到测站的电离层延迟发生变化,因此差分后的电离层残差会相应地发生变化。
电离层距地面的高度在60~1 000km之间,而北斗系统中GEO和IGSO卫星的高度为35 786km,远大于电离层距地面的高度。取中心电离层距地面的高度为350km,对于同一电离层而言,假如测站间距离的变化和差分卫星间距离的变化引起的电离层残差大小变化一定,由几何知识可知测站间距离的变化和差分卫星间距离的变化关系:
(6)
式中:d星和d站分别为星间变化的距离和测站间变化的距离;由式(6)可知差分卫星之间水平距离的增大没有两测站间距离增大对双差电离层残差的影响显著。但是实验数据表明卫星之间水平距离的增大对双差电离层残差的影响不可忽视。
3实验验证分析
为验证TCAR方法中窄巷模糊度固定成功率与双差卫星间水平距离的关系,使用司南接收机采集静态的北斗三频数据进行实验验证,数据集的具体情况见表2。实验过程中使用本文介绍的TCAR方法单历元固定模糊度,其中宽巷和窄巷模糊度的取整成功率均为相应的超宽巷或宽巷模糊度固定正确情况下的成功率。
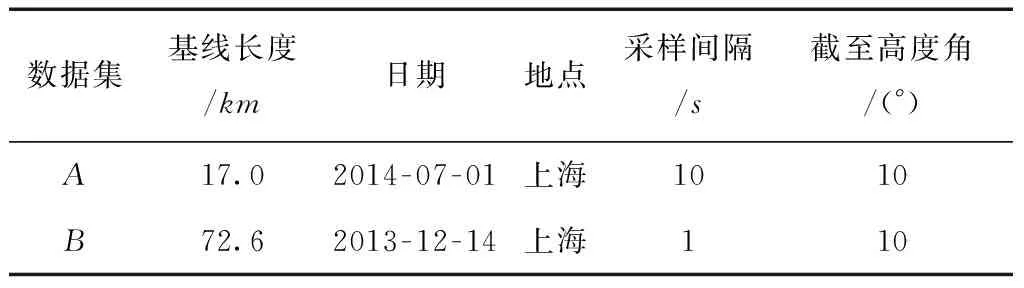
表2 基线数据概况
3.1短基线模糊度固定
短基线情况下不同双差卫星对的超宽巷、宽巷和窄巷模糊度固定成功率见表3;以北斗的GEO卫星为例,双差卫星对C02-C01、C03-C01和C05-C01的窄巷模糊度浮点解如图2所示。
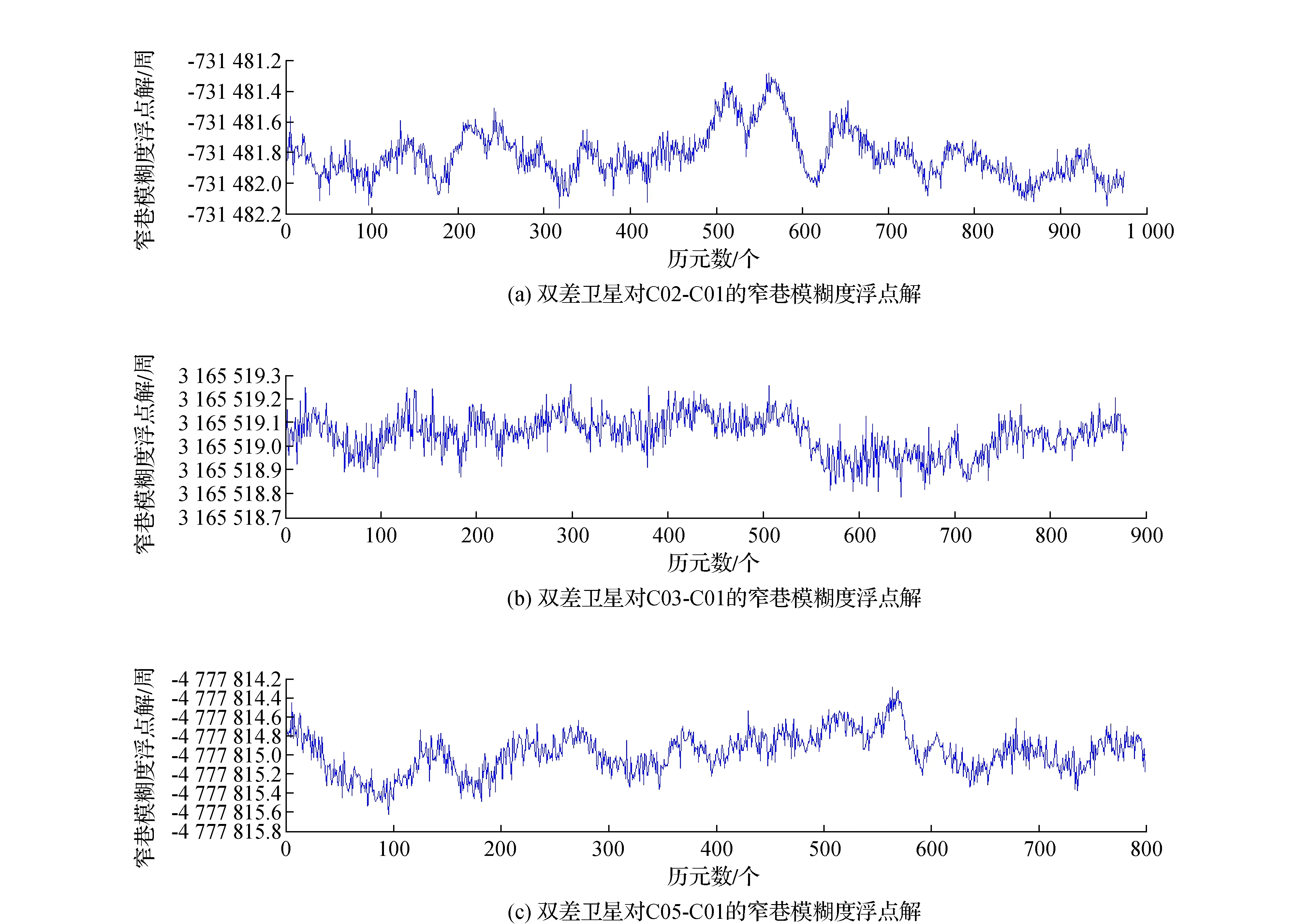
图2 17.0 km基线不同双差卫星对窄巷模糊度浮点解
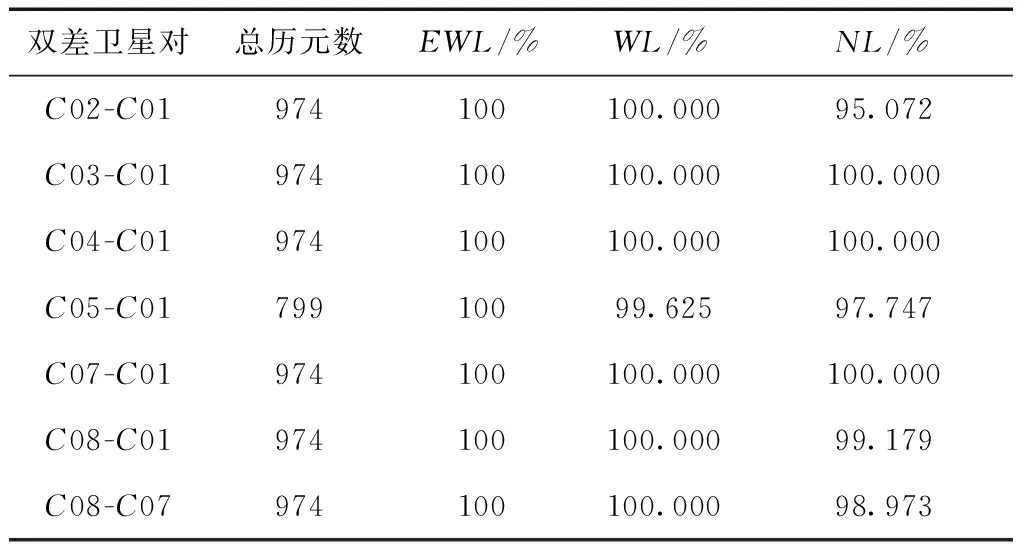
双差卫星对总历元数EWL/%WL/%NL/%C02-C01974100100.00095.072C03-C01974100100.000100.000C04-C01974100100.000100.000C05-C0179910099.62597.747C07-C01974100100.000100.000C08-C01974100100.00099.179C08-C07974100100.00098.973
由表3可知在17.0km长的基线情况下超宽巷和宽巷模糊度都能以很高的成功率固定。从表3和图2中可以看出虽然短基线情形下窄巷模糊度也能以较高的成功率固定,但是双差卫星对C03-C01、C02-C01和C05-C01 的窄巷模糊度浮点解波动范围依次增大,而双差卫星对C03-C01、C02-C01和C05-C01之间的水平距离分别为21 705.5km、44 146.7km和59 782.0km,可见窄巷模糊度浮点解波动范围的增大与双差卫星间水平距离的增大相符合,因此可以得出随着双差卫星间水平距离的增大电离层残差也相应地增大。
3.2中等长度基线模糊度固定
表4统计72.6km长的基线不同双差卫星对的超宽巷和宽巷模糊度固定成功率,双差卫星对C02-C01、C03-C01和C05-C01 的窄巷模糊度浮点解如图3所示。

表4 72.6 km基线单卫星对单历元模糊度固定成功率
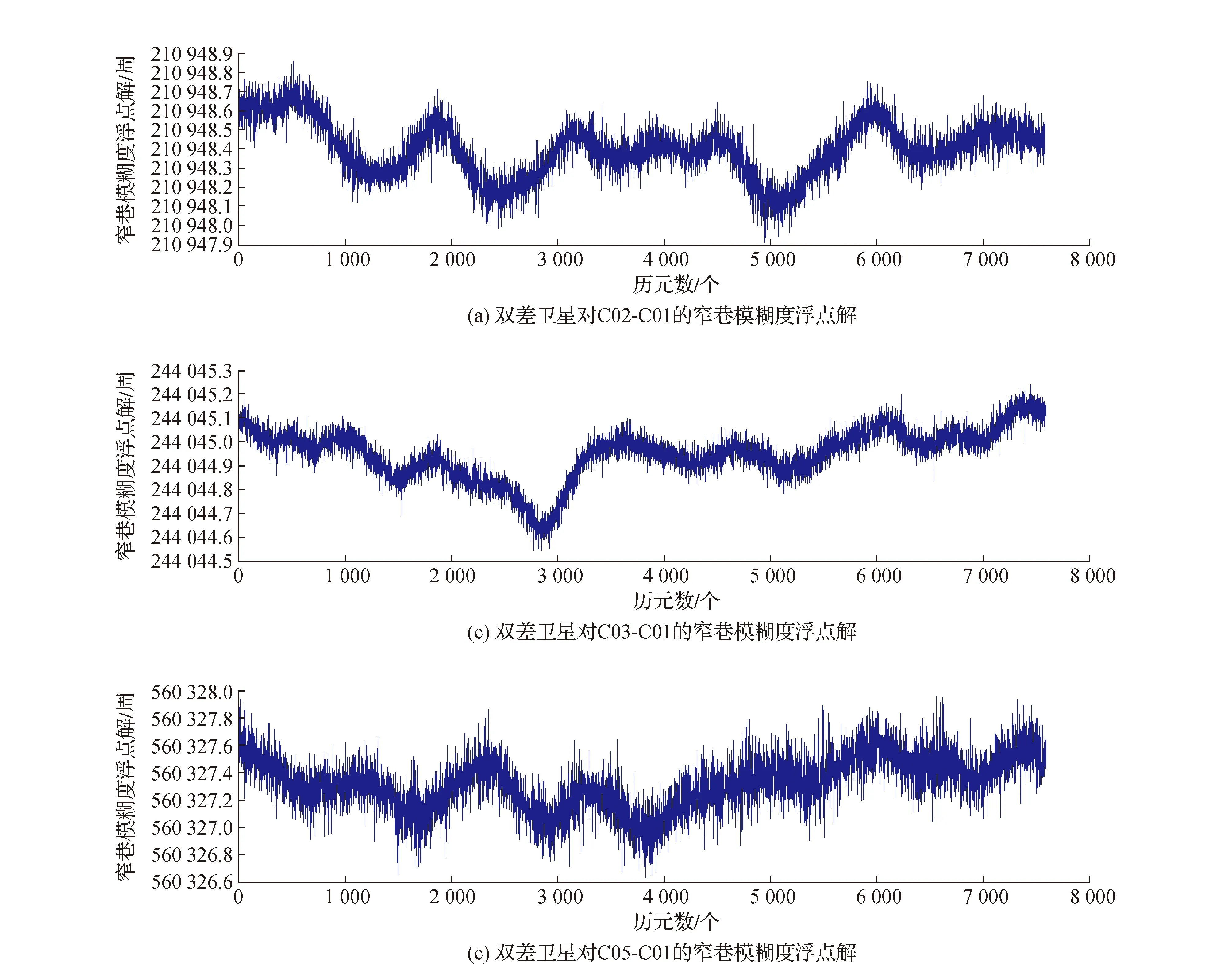
图3 72.6 km GEO不同双差卫星对窄巷模糊度浮点解
从表4中可以看出,72.6km长的基线其超宽巷模糊度固定率高达百分之百,宽巷模糊度除双差卫星对C05-C01的固定率相对较低外其他的均能达到较高的固定率,由于双差卫星对C05-C01之间的水平距离过大导致电离层残差增大,降低了宽巷模糊度的固定率。在72.6km长基线情况下由于电离层残差较大,窄巷模糊度已经无法准确地固定;分析图3可知,双差卫星对C03-C01、C02-C01和C05-C01的窄巷模糊度浮点解浮动范围分别为0.8周、1.0周和1.4周,随着差分卫星间水平距离的增大,相应的模糊度浮点解浮动范围在逐渐增大,这说明窄巷模糊度浮点解受到的电离层残差逐渐增大。
再以IGSO与GEO卫星为例,由于IGSO卫星位置在不停地变动,因此相应的IGSO与GEO卫星间以及IGSO与IGSO卫星之间的水平距离也在不断地变化;当两测站距离一定时,随着卫星对之间水平距离的变化,相应的电离层残差大小也会发生变化,且变化率随着两卫星间距离的变化率而改变。表5列出在部分历元时双差卫星对C07-C01和C08-C07之间的概略水平距离。
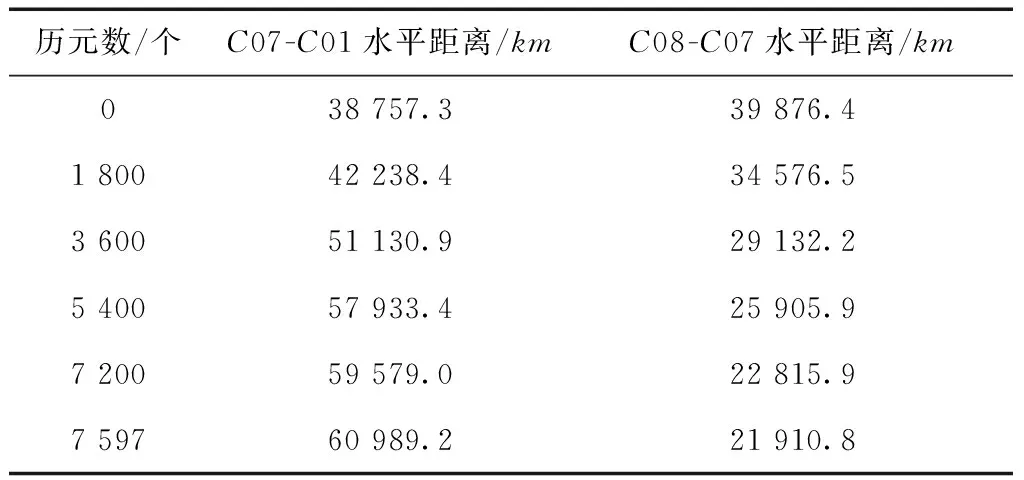
表5 不同历元时双差卫星对C07-C01和
从表5中可以得知,在观测时间段内双差卫星对C07-C01之间的水平距离随着历元数的增加逐渐增大。双差卫星对C08-C07之间的距离在观测时段内不断地减小且减小的幅度逐渐递减。
图4中(a)、4(b)分别列出了IGSO卫星与GEO卫星组成的双差卫星对C07-C01和C08-C07的窄巷模糊度浮点解。
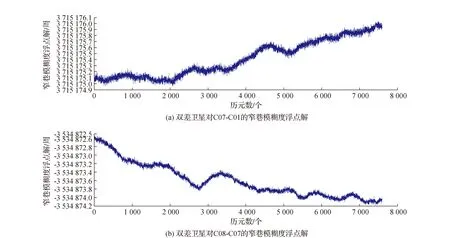
图4 IGSO与GEO不同双差卫星对窄巷模糊度浮点解
双差卫星对C07-C01之间的距离在观测时段内单调递增,由式(5)可知,该卫星对窄巷模糊度浮点解受到的残差电离层系统误差应单调递增,这与图4(a)窄巷模糊度浮点解总体变化趋势相符。由于双差卫星对C08-C07之间的距离在观测时段内不断地减小且减小的幅度随时间递减,因此相应的由电离层残差引起的系统偏差也应当随之减小且减小幅度随时间变缓,如图4(b)中窄巷模糊度浮点解总体变化趋势图所示。
从以上的实验中可以看出,电离层残差并不是严格地随着差分卫星间水平距离的增大而增大,因为电离层延迟的大小还与时间、地点以及太阳活动的程度等因素有关。但是,总体而言,随着差分卫星间水平距离的增大残留电离层延迟的大小随之增大。
4结束语
本文对制约双差电离层残差大小的因素进行分析,指出双差卫星间水平距离能够影响双差电离
层残差的大小,并用实测的北斗三频数据验证该结论。通过实验得出,即便是在17km长的短基线情况下,如果所选双差卫星对之间的水平距离过大,依然能影响窄巷模糊度的固定成功率;在72.6km长的基线情况下,如果所选双差卫星对之间的水平距离较小,则窄巷模糊度浮点解受到的由电离层残差引起的系统误差将会变小,这有利于窄巷模糊度的固定。因此,在求双差的过程中,选择高度角较大且水平距离较小的差分卫星对更有利于TCAR方法中模糊度的固定。
参考文献:
[1]刘基余.攻占GNSS高动态高精度测量制高点的思考[J].遥测遥控,2014,4(4):1-8.
[2]伍岳,邱蕾.网络RTK模式下多频载波相位观测值解算整周模糊度[J].测绘工程,2013,22(4):1-4.
[3]王奉伟,周世健,周清,等.选权迭代法残差初值求解方法比较[J].测绘科学,2015,40(8):18-21.
[4]HARRISRA.DirectResolutionofCarrierPhaseAmbiguityby‘BridgingtheWavelengthGap’[M].ESA,ESAPub.TST/60107/RAH/word,1997.
[5]李金龙.北斗/GPS多频实时精密定位理论与计算[D].郑州:信息工程大学,2014.
[6]VOLLATHU.AnalysisofThreeCarrierAmbiguityResolutionTechniquesforPreciseRelativePositioninginGNSS-2[J].JournaloftheInstituteofNavigation,1999,(1):13-23.
[7]FENGY.GNSSThreeCarrierAmbiguityResolutionUsingIonosphere-reducedVirtualSignals[J].JournalofGeodesy,2008,82(12):1-4.
[8]FORSSELLB,MARTIN-NEIRAM,HARRISRA.CarrierPhaseAmbiguityResolutioninGNSS-2[C].In:ProceedingofIONGPS-97,KansasCity,1997:1727-1736.
[9]伍岳,付小林,李海军,等.TCAR/MCAR方法在不同距离基线模糊度求解中的应用[J].武汉大学学报(信息科学版),2007,32(2):172-175.
[10]HATCHR.Anewthree-frequency,geometry-freetechniqueforambiguityresolution[C].InProceedingsofIONGNSS,2006,26-29:309-316.
[11] 李博峰,沈云中,周泽波.中长基线三频GNSS模糊度的快速解算[J].测绘学报,2009,38(4):296-301.
[12] 范建军,王飞雪.一种短基线GNSS的三频模糊度解算(TCAR)方法[J].测绘学报,2007,36(1):43-49.
[责任编辑:李铭娜]
Analysis of horizontal distance between satellites affecting DD ionospheric residual
LIU Weihua,WU Jiangfei,LI Guangcai,ZHAO Caixin
(SchoolofSurveyingandMapping,InformationEngineeringUniversity,Zhengzhou450052,China)
Abstract:Based on the TCAR method,this paper analyzes the factors of double-difference(DD) ionospheric residual which affects the fixing of narrow-lane ambiguity,and points out the length of the baseline between stations as well as the difference of the distance between the satellites affecting the size of the ionosphere residual,on which the measured data of the triple frequency is verified.The experimental results show that for the 17 km short baseline,larger distance between the difference satellites will reduce the success rate of fixed narrow ambiguity.However,for 72.6 km medium length baseline,the shorter distance between the DD satellites will lead to smaller double-difference ionospheric residual,which is conducive to the fixing of narrow lane ambiguity.
Key words:TCAR;BDS three frequencies;ambiguity resolution;DD ionospheric residual;horizontal distance between the satellites
DOI:10.19349/j.cnki.issn1006-7949.2016.07.014
收稿日期:2015-05-06;修回日期:2015-09-21
基金项目:国家自然科学基金资助项目(41174006);中国博士后科学基金资助项目(201003772;20100481458)
作者简介:刘卫华(1989-),男,硕士研究生.
中图分类号:P228
文献标识码:A
文章编号:1006-7949(2016)07-0066-05