基于混合边缘检测的极化SAR图像海岸线检测
2016-06-21殷君君
刘 春, 殷君君, 杨 健
(清华大学电子工程系, 北京 100084)
基于混合边缘检测的极化SAR图像海岸线检测
刘春, 殷君君, 杨健
(清华大学电子工程系, 北京 100084)
摘要:针对传统方法在金属建筑反射干扰严重情况下无法实现海岸线精确检测问题,本文在分析海岸线边缘特有散射特性的基础上,提出了混合统计和散射特性的海岸线边缘检测方法。该方法分别以似然比和体散射功率比值检测子检验窗口相邻区域统计和散射特性的不同,并通过模糊集方法融合两个检测子。在由提出的检测子实现粗岸线检测的基础上,采用基于边缘能量图的快速活动轮廓模型对岸线进一步精细化。对大连海岸区域极化合成孔径雷达(synthetic aperture radar, SAR)图像进行实验,结果表明提出算法有效减少了强金属建筑干扰和不同海况区域导致的虚假岸线边缘,实现了精确的海岸线检测。
关键词:合成孔径雷达; 海岸线检测; 极化; 边缘检测
0引言
作为合成孔径雷达(synthetic aperture radar, SAR)图像海岸带地物解译的基本步骤之一,精确的海岸线提取具有重要意义。海岸线位于海面与陆地的交界处,海面区域与陆地区域的散射特性具有明显差异,因此海岸线的检测可从整体上通过分割陆地与海面区域实现,也可以在局部上通过检测海面与陆地交界处边缘实现。受制于SAR图像相干斑噪声影响,无论是基于海陆分割的方法还是边缘检测的方法都难以实现精确检测。
最初的海岸线检测多采用基于边缘检测的方法实现,文献[1]最早提出基于边缘检测与边缘跟踪的岸线检测方法,采用阈值分割得到平滑后的边缘能量图,然后通过边缘跟踪实现岸线检测。文献[2]首先在低分辨率图像上采用比值边缘检测和平滑、连接等处理实现岸线粗检测,然后使用蛇形活动轮廓模型精细化岸线检测结果。文献[3]采用基于小波变换边缘检测的方法实现岸线的粗检测,然后同样采用蛇形活动轮廓模型精细化检测结果。基于边缘检测的方法难点在于,由于SAR图像乘性相干斑噪声的影响,在具有强散射特性的区域会检测出许多虚假边缘;在海况不同的情况下,不同海况海面区域交界处也同样会检测出边缘;此外近海裸地区域由于含水量较高,其与海面散射强度差异不明显,这也难以保证检测的海岸边缘的连续性。
基于区域分割的海岸线检测方法相比于边缘检测方法,充分利用海面区域与陆地区域散射强度整体上明显的差异,检测出的区域轮廓线连续,图像预处理和后续处理相对简单。文献[4]和文献[5]提出了基于马尔可夫场分割的岸线检测方法。文献[6]在海面、陆地区域概率统计特性服从混合对数正态分布假设下,使用改进的水平集分割方法实现岸线检测。基于海陆分割方法的难点在于,海面区域与陆地区域并非匀质区域,部分高海况区域散射强度甚至会高于部分陆地区域;而陆地区域同时包含人工建筑、植被、裸地及水域区域,无法使用单一统计或散射模型描述,这就导致简单的两区域分割无法实现精确的岸线检测;此外,近海城市区域金属建筑强的二次反射干扰会导致其相邻海域散射强度大及散射成分复杂,导致基于统计特性的分割方法错分。
对于极化SAR图像,若采用基于马尔可夫场模型的图像分割方法[7]和水平集图像分割方法[8]进行海岸线检测,对于受金属建筑强干扰的海域同样会导致错误分割。而采用基于局部统计特性的恒虚警似然比边缘检测子[9]进行海岸线检测,虽然对于受金属建筑强干扰海域能检测出海岸线边缘,但同时会检测出虚假边缘,并且对于海况复杂区域,也会在海面区域检测出虚假边缘导致错误的岸线检测结果。考虑到金属建筑强的二次反射干扰对于相邻海域干扰成分主要以二次散射成分为主,而不同海况区域散射成分仍然以Bragg表面散射成分为主,为减少海面区域的虚假边缘,充分利用海岸带周边地物的散射特性,本文提出一种基于混合统计特性和散射特性边缘检测子的极化SAR图像海岸线检测方法。该方法首先提出了基于Freeman三成分分解[10]体散射成分的边缘检测子;然后将其与经典的基于统计特性的边缘检测子相融合,并通过海面区域边缘少、整体连通好的特性实现海岸线的粗略检测;最后在粗岸线检测结果基础上,采用基于边缘能量图的快速蛇形活动轮廓模型实现精细化的岸线检测。
1基于混合统计和散射特性边缘检测子的海岸线检测
本部分在简要介绍经典的基于统计特性的边缘检测子和分析海岸线边缘的特性基础上,介绍提出的基于Freeman三成分分解体散射成分的边缘检测子,并给出基于两种检测子融合的海岸线检测方法。
1.1基于统计特性的似然比边缘检测子
极化SAR数据每一分辨单元表示目标在一组极化天线照射下的散射系数,表示为一个2×2复矩阵:
(1)
式中,H,V表示一组极化基方向;Sqp表示在p极化天线发射q极化天线接收下目标的后向散射系数。对于单站极化雷达,满足互易定理,SHV=SVH。此时,目标的极化特征可用Pauli矢量k表示
(2)
为抑制极化SAR数据固有的相干斑噪声,通常采用多视处理,即多个分辨单元数据进行非相干平均:
(3)
式中,(·)H表示共轭转置;L表示多视处理视数。
(4)

极化SAR图像似然比恒虚警(constant false alarm rate, CFAR)检测子[9],以像素为中心划定一定窗区域,对两相邻区域统计特性作假设检验,若两区域散射矩阵Zx和Zy,分别服从复Wishart分布,Zx~W(Σx,Lx,p)和Zy~W(Σy,Ly,p)。则基于统计特性的假设检验模型为
在H0假设条件下,由广义似然比准则,可得检测子为
(5)
若Lx=Ly,则
(6)

1.2基于散射特性的边缘检测子
基于统计特性的边缘检测子进行海岸线检测时,虽能检测出海岸线边缘,但对于受金属建筑强干扰海域和海面海况复杂区域,会在海面区域检测出许多虚假边缘,这些虚假边缘使得正确检测海岸线十分困难。考虑到海岸线边缘的特殊性,其位于海面区域与植被、人工建筑、沙滩交界处,海面区域散射以Bragg表面散射为主,其体散射成分与植被和人工建筑相比具有显著差异。另外金属建筑强的二次回波信号对于相邻海域干扰成分主要以二次散射成分为主,不同海况区域的体散射成分差异相对微弱。类似于似然比边缘检测子,构造基于体散射成分的边缘检测子。
根据Freeman三成分分解, 多视极化SAR图像相干矩阵可分解为平面散射、二次散射、体散射3种散射成分的和。
(7)
式中,Ps, Pd, Pv分别代表平面散射,二次散射及体散射的功率大小。
若相邻区域体散射成分分别为Pvx,Pvy。则基于体散射成分的假设检验模型为
由Freeman分解得到的体散射成分Pv=4〈|SHV|2〉,对于多视极化SAR图像〈|SHV|2〉服从Gamma分布,在H0假设条件下,若窗口区域两领域等效视数Lx=Ly,同样可得体散射功率似然比检测子
(8)
类似对数似然比边缘检测子,对r取对数并取负,可得
(9)

1.3两种检测子融合
海面与沿岸沙滩体散射成分差异微弱,采用基于体散射特性的边缘检测子边缘能量微弱。实际的岸线边缘在其相邻两区域应该同时具有统计特性和体散射成分的差异,即实际的海岸线边缘判断的假设检验模型为

(10)

由式(10)可知σ满足
(11)
融合检测子提高了两种检测子同时偏高时的置信程度,降低了两种检测子同时偏低时的置信程度。
1.4基于融合检测子的海岸线检测
采用融合检测子进行海岸线检测时,需确定检测子门限。融合检测子的概率分布无法解析表达,为保证岸线边缘的连续性,选择均质海面区域进行检测子分布拟合,在设定的虚警概率下确定门限。其中均质海面区域与似然比检测子中等效视数估计区域相同,可采用监督或非监督方法确定,非监督方法在极化SAR图像Span图(功率图)上等间隔选择10%的像素,以各像素为中心确定M×M窗口区域,选择功率方差最小区域作为检测子门限确定和等效视数估计区域。
以极化SAR图像各像素为中心划定wr×wr的窗口区域,分别通过式(6)~式(9)计算不同窗口方向(见图1)相邻区域融合检测子能量,选择能量最大值为像素的边缘能量σ。
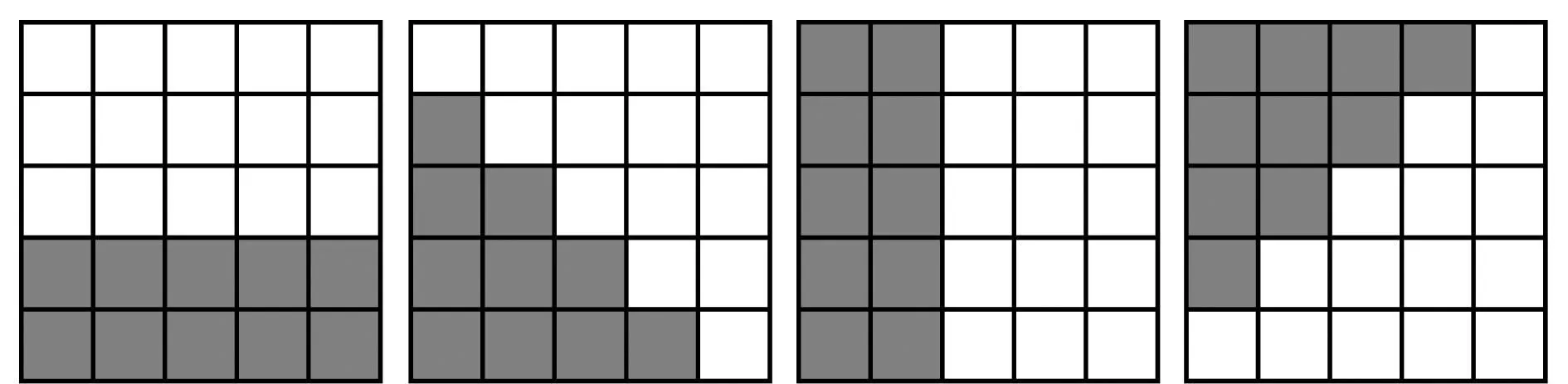
图1 边缘检测窗口方向(例:wr=5)
在设定的虚警概率Pfa (0.01~0.05)下,根据估计区域边缘能量直方图分布确定检测门限。对于检测得到的边缘图,陆地区域边缘密集,而海面区域边缘稀疏,根据海面无边缘区域的连通性可确定出海面区域,剔除海面区域小面积边缘得到粗略的海岸线检测结果。
2基于活动轮廓模型的海岸线精细化算法
由融合边缘检测子得到的粗略海岸线检测结果受窗口区域选择和岸线形状的复杂性距离真实岸线有一定偏差。为得到精确的海岸线,以粗略岸线检测结果为初始化,结合边缘能量图σ,使用快速蛇形活动轮廓模型[13]精细化检测结果,算法原理及步骤如下。
蛇形活动轮廓模型将曲线参数化表达,分别定义曲线的内部和外部能量函数,曲线逐步演进搜索直至能量函数达到极小值,由此确定的曲线作为待检测的轮廓线。若曲线参数化表示为v(s)=(x(s),y(s)),曲线能量函数定义如下:
(12)
式中,内部能量Einternal包括曲线弹性能量和弯曲应变能量;外部能量Eexternal为表征图像边缘等特征的能量;限制能量Econstraint为外部限制。
忽略外部能量限制,由曲线内部和外部能量定义可得
(13)


(14)
式中,Gi为Vi点处梯度幅度图。使用粗岸线检测得到的融合检测子边缘能量图σ为各像素的梯度幅度,则精细化岸线检测算法可描述如下:
步骤 1对粗岸线检测结果进行边缘跟踪,得到岸线轮廓(包括图像边界)的有序点{Vi,i=0,1,2,…,n}表示;
步骤 2初始化活动轮廓模型边界曲线γ(0)为{Vi,i=0,1,2,…,n},将边缘能量图σ按8比特量化值作为图像各像素点的梯度幅度值{G(x,y)|(x,y)∈Ω}。初始化参数α,β,γ值为1,设定像素邻域窗口N,设k=1;
步骤 3开始迭代,在第k次迭代,对曲线的每一点Vi,根据曲线能量近似定义计算Vi8邻域各点{Vj,j=0,1,…,7}能量Econ,j,Ecur,j和Eimage,j,Econ,j和Ecur,j由曲线上的点近似计算获得,Eimage,j由Vj的N×N邻域按式(14)计算获得,由此得到Vj的曲线能量Evj=αiEcon,j+βiEcur,j+γiEimage,j,找出局部能量最小的Vjmin,并将Vi移至Vjmin,得到第k次演进结果γ(k);

3实验结果及分析
使用2012年4月17日Radarsat2C波段大连海岸区域数据进行实验,数据分辨率为4.73m×5.33m,大小为5 491×2 156。
3.1多视数据局部区域处理结果
首先对多视处理后部分区域进行实验说明本文提出算法仿真流程及性能,边缘检测子窗口大小设为5×5,虚警概率Pfa设为0.01。如图2所示,其中图2(a)为原始数据4视处理后800像素×1 000像素Pauli着色图;图2(b)为似然比检测子边缘能量图;图2(c)为在虚警概率为0.01下似然比检测子得到的边缘检测结果;图2(d)为提出的融合边缘检测子边缘能量图;图2(e)为在虚警概率为0.01下提出边缘检测子边缘检测结果。
图3为确定检测门限均匀海面区域似然比边缘检测子和融合边缘检测子边缘检测门限与虚警概率的关系,其中图3(a)为似然比检测子的结果,图3(b)为提出边缘检测子的结果。
从图2(a)可以看出在大连港口区域附近,海面受金属建筑干扰严重,海面同时存在不同海况情况,从似然比检测子和提出检测子边缘能量图来看,提出融合检测子边缘能量图在金属建筑附近值相对其他区域偏高,导致其他区域边缘呈现暗色。从两种检测子边缘检测结果来看,提出检测子在受金属建筑干扰和海况不同区域虚假岸线边缘少,且检测出的岸线边缘连续。
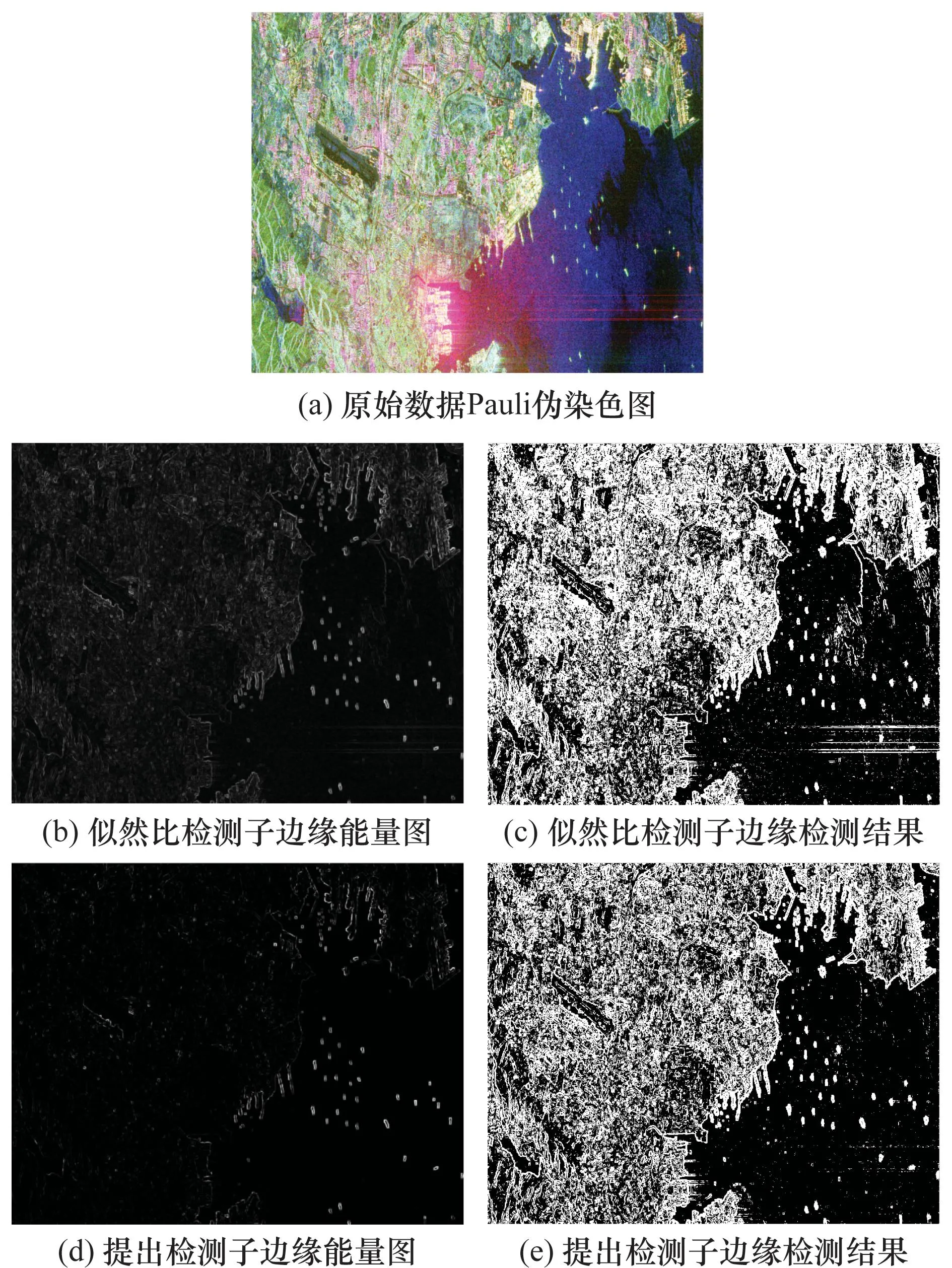
图2 似然比和提出边缘检测子边缘能量图及检测结果
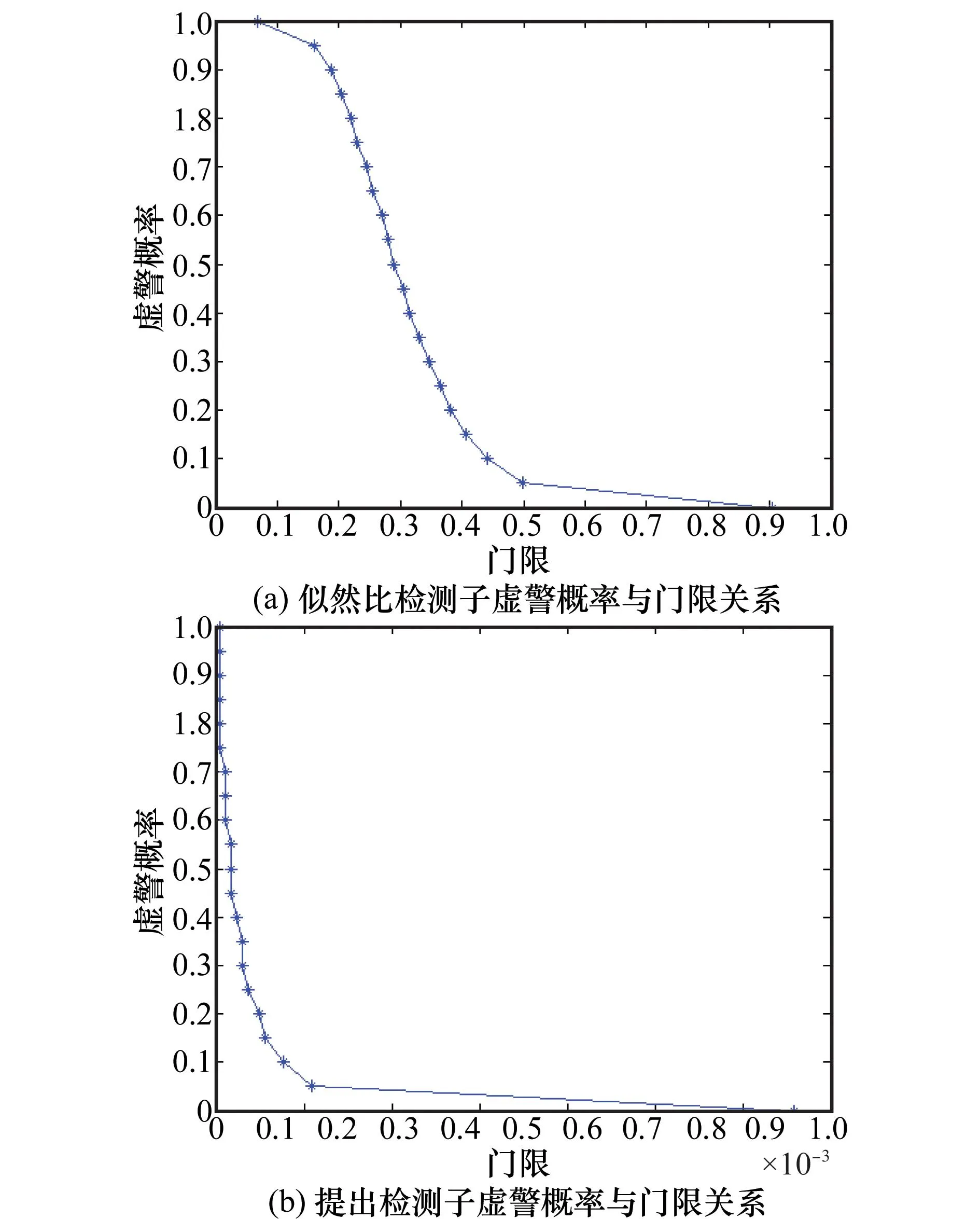
图3 似然比和融合边缘检测子门限与虚警率关系
按粗略海岸线检测算法流程,通过边缘检测图最大连通域判断和小面积边缘像素剔除可得粗略岸线检测结果。图4为基于似然比边缘检测子和基于提出边缘检测子结果对比,其中图4(a)为基于似然比边缘检测子结果,图4(b)为基于提出边缘检测子结果。
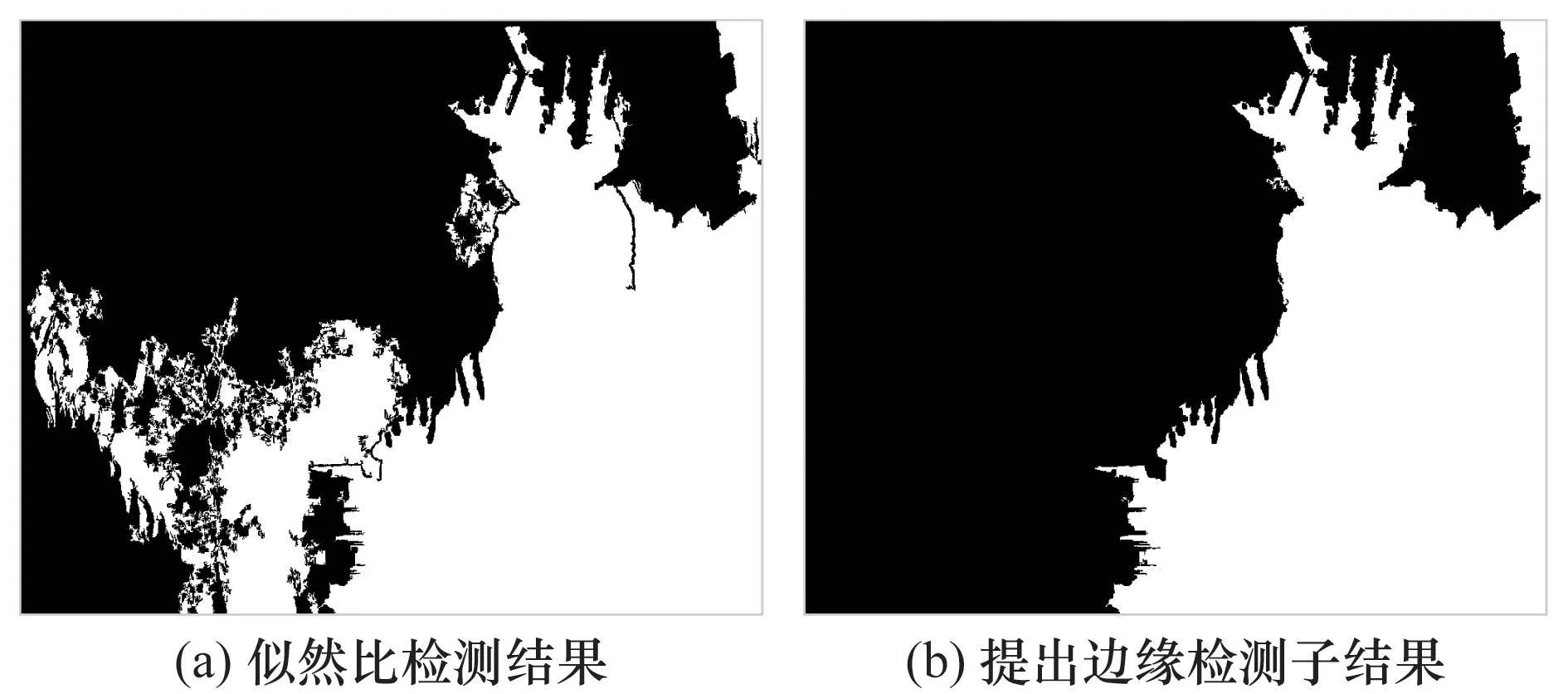
图4 似然比边缘检测子和提出边缘检测子结果对比
从图4结果可以看出,基于似然比边缘检测子无法实现海岸线正确检测,主要原因是在受金属建筑干扰区域边缘不连续,而不同海况区域交界边缘也被错误当作海岸边缘。
在粗岸线检测结果基础上,设定曲线移动点门限为Npts=0.01Ntotal,Ntotal粗岸线轮廓线像素总点数,采用第2节岸线精细化算法可得精细化检测结果,图5为基于提出融合检测子粗略岸线检测和精细化结果对比。其中图5(a)为粗岸线检测结果;图5(b)为粗岸线检测局部放大结果;图5(c)为采用活动轮廓模型岸线精细化结果;图5(d)为精细化岸线局部放大结果。
从图5实验结果可知,提出融合检测子能实现粗略岸线检测,通过岸线精细化处理,提出算法能精确定位二次散射干扰严重区域岸线边缘。
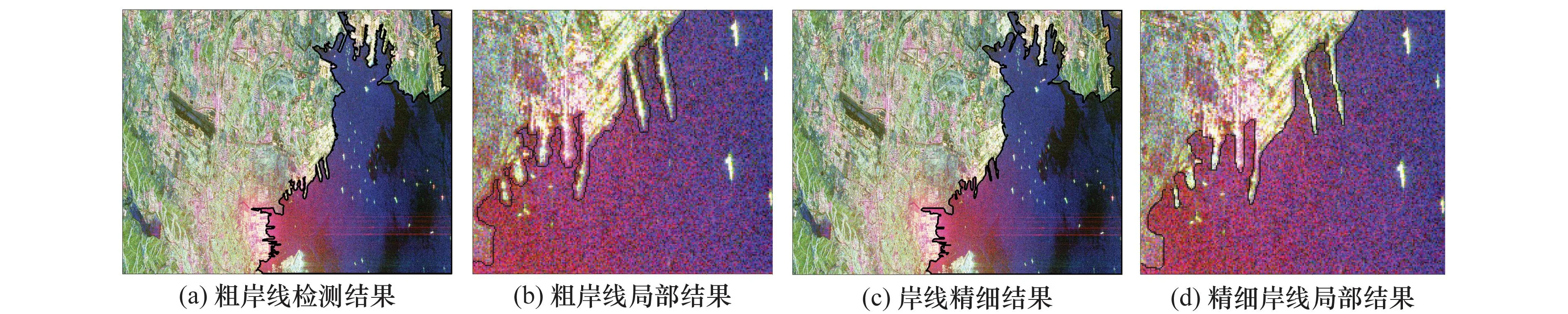
图5 提出融合检测子粗略岸线检测和精细化结果
3.2单视数据全局图像处理结果
在边缘检测子窗口大小为5×5,虚警概率为0.01条件下,图6为海岸线检测结果。图6(a)为原始数据Pauli分解图,图6(b)为融合检测子边缘检测结果,图6(c)为精细化海岸线检测结果,图6(d)为精细化岸线局部放大图。计算精细化岸线结果与实际岸线平均偏差,发现岸线整体平均偏差小于1个像素。
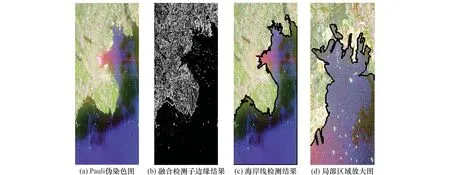
图6 单视数据精细岸线检测结果
图6表明,在受沿岸金属建筑强干扰和海况复杂条件下,提出算法仍能实现岸线精确检测。图6(d)局部区域结果表明,对于海岸线轮廓复杂区域,提出算法同样能无误差定位到实际海岸线。此外,单视数据噪声级别相对多视数据更高,这表明提出算法受图像噪声级别影响小。
4结论
实现海岸线检测的经典方法包括基于海陆分割和基于边缘检测的方法,对于受金属建筑强干扰的海域,其统计特性与一般海域有明显差异,若采用基于海陆分割方法会导致错误分割,而采用基于统计特性的边缘检测子会导致虚假边缘的出现。对于海况不同海面区域,基于统计特性的边缘检测子同样会将不同海况区域交界错误检测为海岸边缘。
本文在分析海岸线边缘特有散射特性的基础上,海面区域与沿岸植被、人工建筑部体散射成分和统计特性差异明显,与裸地区域统计特性差异明显,建立新的假设检验模型,提出了一种适用于海岸线检测的混合统计与散射特性的边缘检测子,该方法将传统基于统计特性似然比边缘检测子与提出的基于体散射成分的边缘检测子有效融合起来。针对基于边缘海岸线受窗口选择和岸线形状复杂性距离真实岸线有一定偏差的问题,对采用新的边缘检测子检测出的粗岸线使用快速活动轮廓模型进行精细化。实验结果表明,提出算法在受金属建筑干扰海面区域和不同海况交界处虚假边缘少,岸线检测结果精确。
参考文献:
[1] Lee J S, Jurkevich I. Coastline detection and tracing in SAR images[J].IEEETrans.onGeoscienceandRemoteSensing, 1990, 28(4): 662-668.
[2] Mason D C, Davenport I J. Accurate and efficient determination of the shoreline in ERS-1 SAR images[J].IEEETrans.onGeoscienceandRemoteSensing, 1996, 34(5): 1243-1253.
[3] Niedermeier A, Romaneessen E, Lehner S. Detection of coastlines in SAR images using wavelet methods[J].IEEETrans.onGeoscienceandRemoteSensing, 2000, 38(5): 2270-2281.
[4] Descombes X, Moctezuma M, Matre H, et al. Coastline detection by a Markovian segmentation on SAR images[J].SignalProcessing, 1996, 55(1): 123-132.
[5] Baselice F, Ferraioli G. Unsupervised coastal line extraction from SAR images[J].IEEEGeoscienceandRemoteSensingLetters, 2013, 10(6): 1350-1354.
[6] Silveira M, Heleno S. Separation between water and land in SAR images using region-based level sets[J].IEEEGeoscienceandRemoteSensingLetters, 2009, 6(3): 471-475.
[7] Rignot E, Chellappa R. Segmentation of polarimetric synthetic aperture radar data[J].IEEETrans.onImageProcessing, 1992, 1(3): 281-300.
[8] Ben A I, Mitiche A, Belhadj Z. Polari metric image segmentation via maximum-likelihood approximation and efficient multiphase level-sets[J].IEEETrans.onPatternAnalysisandMachineIntelligence, 2006, 28(9): 1493-1500.
[9] Schou J, Skriver H, Nielsen A A, et al. CFAR edge detector for polarimetric SAR images[J].IEEETrans.onGeoscienceandRemoteSensing, 2003, 41(1): 20-32.
[10] Freeman A, Durden S L. A three-component scattering model for polarimetric SAR data[J].IEEETrans.onGeoscienceandRemoteSensing, 1998, 36(3): 963-973.
[11] Bloch I. Information combination operators for data fusion: a comparative review with classification[J].IEEETrans.onSystems,ManandCybernetics,PartA:SystemsandHumans, 1996, 26(1): 52-67.
[12] Tupin F, Maitre H, Mangin J F, et al. Detection of linear features in SAR images: application to road network extraction[J].IEEETrans.onGeoscienceandRemoteSensing,1998,36(2):434-453.
[13] Williams D J, Shah M. A fast algorithm for active contours and curvature estimation[J].CvgipImageUnderstanding, 1992, 55(1): 14-26.
刘春(1988-),男,博士研究生,主要研究方向为极化SAR图像处理。
E-mail:liuchun12@tsinghua.edu.cn
殷君君(1983-),女,博士后,主要研究方向为极化雷达。
E-mail:yinjj07@gmail.com
杨健(1965-),通信作者,男,教授,博士,主要研究方向为极化雷达。
E-mail:yangjian_ee@tsinghua.edu.cn
Coastline detection in polarimetric SAR images based on mixed edge detection
LIU Chun, YIN Jun-jun, YANG Jian
(DepartmentofElectronicEngineering,TsinghuaUniversity,Beijing100084,China)
Abstract:When the reflection interference of metal buildings is severe, a new coastline detection method is proposed based on edge detection mixing statistics and scattering characteristics. It overcomes the difficulty in accurate coastline detection by the traditional methods. The differences between statistical characteristics and scattering characteristics in adjacent region of the detection window are tested by using the likelihood ratio detector and ratio detector of volume scattering power respectively, and then the two detectors are fused by using the fuzzy set method. On the basis of coarse coastline detection by using the proposed detector, the coarse results are further improved by using the fast active contour model based on the edge energy map. The detection scheme is tested by using polarimetric synthetic aperture radar (SAR) images acquired by RADARSAT-2 over Dalian area of China. Experiment results demonstrate that the false edges resulted with the reflection interference of metal buildings and complex ocean environment are greatly reduced and the real coastline is accurately detected.
Keywords:synthetic aperture radar (SAR); coastline detection; polarization; edge detection
收稿日期:2015-07-13;修回日期:2015-10-20;网络优先出版日期:2016-02-23。
基金项目:国家自然科学基金(61490693, 61132008, 41171317);中国航空科学基金(20132058003)资助课题
中图分类号:TN 957.52
文献标志码:A
DOI:10.3969/j.issn.1001-506X.2016.06.07
作者简介:
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160223.0847.018.html
