水声信道建模与仿真*
2016-06-21甘忠良
甘忠良 李 亮
(92785部队 葫芦岛 125208)
水声信道建模与仿真*
甘忠良李亮
(92785部队葫芦岛125208)
摘要水声信道建模在仿真预测通信系统性能方面作用显著,可以大大降低海试成本。文中基于射线理论模型,建立了两种常用的水声信道模型:相干多途信道模型和时变信道模型,模型从某种程度上反映了水声信道的主要特点,虽然其特性与真实信道特点有一定差距,但并不影响其在水声通信性能估计方面的应用。
关键词射线理论; 水声信道; 建模; 仿真
Class NumberTB533
1引言
海洋作为一种特殊的声信道,具有时变、频变和空变的性质。声波在传播的过程中,不仅其能量损失随距离和频率而增加,导致水声通信可用带宽和作用距离受限,而且存在严重的多途效应,引起接收端信号混叠,在时域上形成码间干扰(ISI),频域上产生选择性衰落。同时由于海洋的运动、海面波浪的反射,以及收发平台之间的相对运动,导致声信号在传播的过程中产生多普勒扩散,使接收信号在时域上被展宽或压缩,在频域上弥散,引起时间选择性衰落。海洋信道的这些特点,严重影响了水声通信系统的性能。因此掌握海洋信道特性对于发展水声通信技术十分重要,然而实际海洋信道测量非常耗时、耗资、耗力,且某次测量出来的结果只能描述该区域该季节时间段内的特性,不具有普遍意义,使用范围受限。而基于海洋环境统计特性和实测数据的水声信道建模成本低、适用环境范围广,在预测水声通信系统性能方面有着不可替代的优势,已经成为当前水声领域的一个研究热点。
通常对海洋环境特征描述越准确、越详细,建立的信道模型更贴近实际。然而,想要准确描述所有水声信道特征非常困难。因此通常主要描述对水声通信影响较为显著的多途传播以及由相对运动导致的多普勒效应等主要特征。
文献[1]建立了一个基于静态信道脉冲响应的信道仿真器,但没有考虑信道的多普勒效应。文献[2]建立了一种时变信道模型,其将每根本征声线的幅度和相位视作一个随机过程,时延固定。但是其无法给出本征声线幅度、相位变化规律与运动之间的准确物理关系。本文在分析水声信道对声传播主要影响因素的基础上,利用射线模型,建立了两种常用模型:相干多途信道模型和时变信道模型,在一定程度上正确反映了水声信道的特点。
2信道模型分析
通常,水声信道建模可以分为基于物理的确定性信道或时不变信道建模和随机不确定信道或时变信道建模,或是两种结合,即在基于物理参数计算基础上考虑运动的信道建模。
2.1相干多途信道模型
从多数应用场合来看,实验证明信道可以看做是缓慢时变的相干多途信道,即信道的介质和边界条件时不变,声源和接收器位置固定。若观察处理时间不是特别长,可以用时不变的滤波器来表示[3]。此时,根据射线理论,声源发出的声信号沿不同路径传播,接收到的信号应该是所有本征声线信号的叠加,通过射线模型可以计算出第条本征声线的幅度为,到达时延为,假定有N条本征途径对声场有重要贡献,在没有色散的情况下,信道的冲击响应可以写成:
(1)
由傅里叶变换不难得到此时信道的传输函数为
(2)
若知道海洋边界条件、声速剖面以及收发相对位置关系,由上述关系式即可求得相干多途信道的传输函数。根据表1给出的某相干多途信道参数[3],可以得到该信道的频率响应如图1所示。
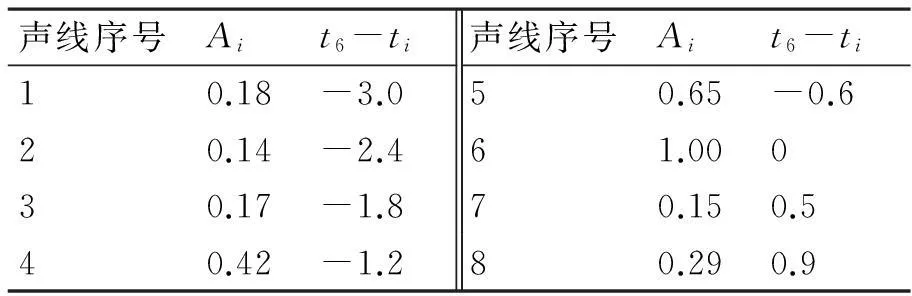
表1 深海相干多途信道射线参数
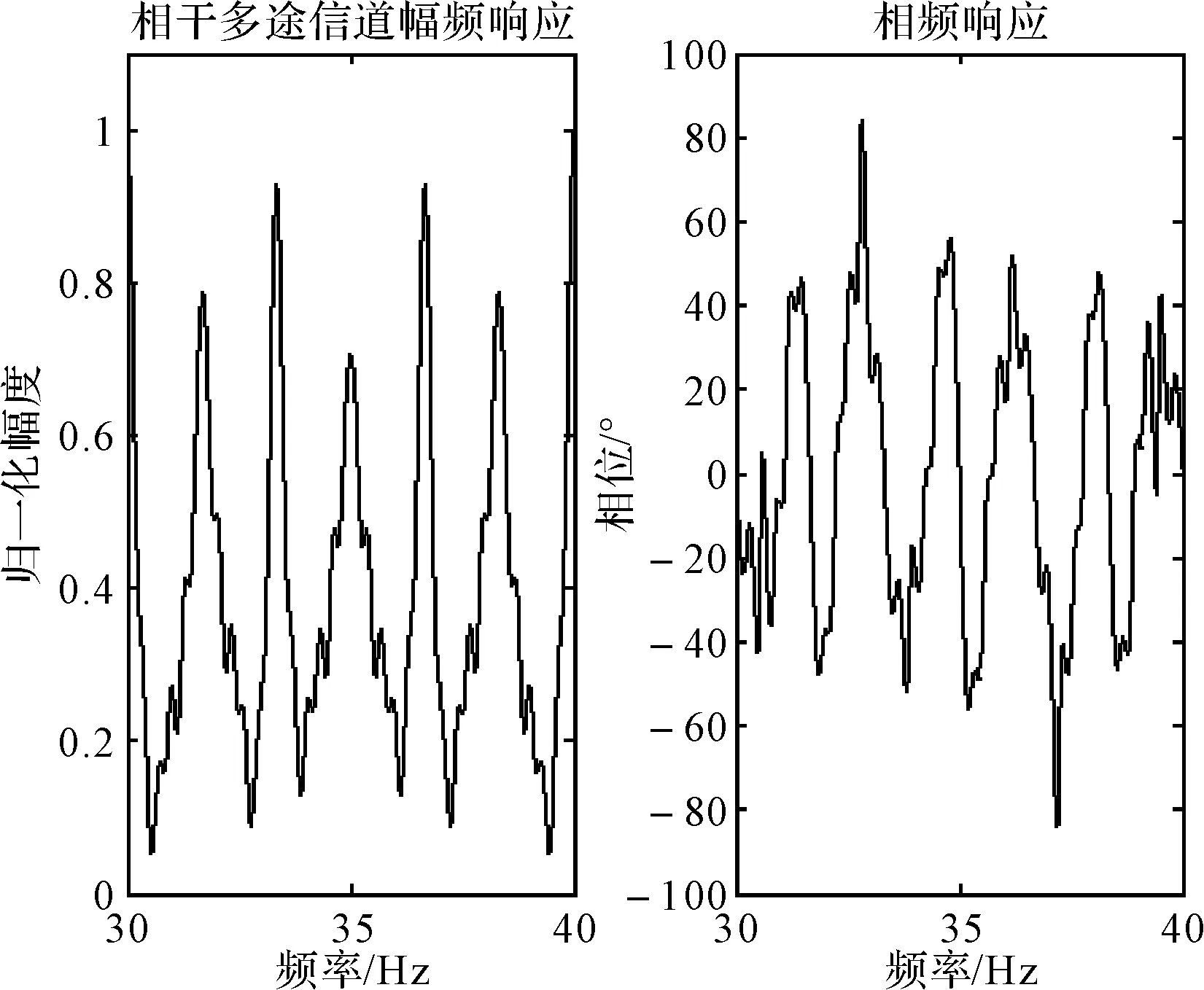
图1 深海信道传输特性
可以看出,相干多途信道的频率响应像一个梳状滤波器,信号在有些频点得到了增强,而在另一些频点会遭受严重的能量损失,从而直接影响信号判决。由于接收端信号是多途信号的叠加,因此相干多途信道系统传输特性对于环境参数和声源与收发器的相对位置十分敏感。
2.2时变信道模型
虽然海洋中多途传播的能量主要部分是相干的,多数情况下可以视作是缓慢时变的相干多途信道。但是在水声通信领域,必须计及海洋信道的随机过程。因为海洋中存在种类繁多的不均匀性,如不均匀的海水介质、波浪、冷热不均的随机水团、游动的海洋生物以及起伏的地形等,这些不均匀性会引起随机的散射,前向散射导致接收信号幅度和波形随机起伏,波浪会导致多途到达信号相对相位关系发生随机变化。这些特点导致在不同时刻发射同样的信号,即使接收点固定,接收到的信号也会产生起伏,导致通信误码率增加,系统的可靠性降低。因此,只有认识到水声信道中声传播的各种随机性,才能深刻理解水声信道对水声通信系统性能的影响,建立的信道模型才更接近实际。
常见的时变信道模型有: 1) 基于统计的瑞利衰落或莱斯衰落模型[4],即认为信号通过信道后其幅度服从瑞利分布或莱斯分布,相位服从均匀分布。 2) 抽头时延模型[5],即有着均匀时延间隔但抽头增益和时延均是随机过程的时变滤波器。下面,先来分析时变信道的性质。通常,时变信道的冲击响应用h(τ,t)来表示:
(3)
其含义为信道在τ时刻前输入的脉冲信号,在t时刻观察到的响应。对h(τ,t)进行关于τ的傅里叶变换,可以得到信道的传输函数:
(4)
可见,当信道是慢变的或不变的,即t=0时,则H(f,t)可以近似等价为时不变信道传输函数H(f),τ和时不变信道冲击响应中的t同样刻画了信道的带宽和频率响应。当存在多普勒效应时,信道的传输函数可以表示为

(5)
在一个存在多普勒效应的时变多途信道环境中,当发射信号为单频信号ejω0t时,接收信号为r(t)=H(ω0,t)ejω0t,而在时不变信道中输入同样的单频信号,信道输出为r(t)=H(ω0)ejω0t。可以看出,时不变信道对输入信号波形没有改变,而时变信道对输入信号进行了幅度和相位调制,即时变信道对输入信号的频谱进行了扩展。
当输入信号为带宽信号时,由傅里叶变换关系可知,输入信号s(t)与其频谱S(w)的关系为
(6)
此时接收信号可以表示为

r(t) =12π∫+∞-∞S(w)H(ω,t)ejωtdt
(7)
式(7)即为时变信道中输入信号与输出信号的关系,其中an为第n条射线的幅度,τn(t)为第n条本征路径的传播时延,ωn(t)为第n条本征路径的多普勒频移,不难看出,此时本征声线的幅度、时延和多普勒频移随观察时间而变化。
根据上述分析,理想情况下,可以建立如图2所示的时变信道模型。但是迄今还无法准确描述水声信道的时变规律,时延和多普勒的变化规律无法确定。因此,这种模型现实意义不大。实验证明,在大多数情况下,接收到的信号由稳定性分量和随机分量叠加而成,实际信道可以看做两个并联的滤波器[3],如图3所示。因此,接收到的信号可以表示为

图2 时变信道模型

图3 相干和非相干滤波器信道模型
(8)
其中an、τn、ωn分别为第n条本征路径的幅度、时延和频移,rn(t)服从瑞利分布,φn(t)服从均匀分布,βn(t)服从高斯分布。其实质是在相干多途信道的基础上叠加一随时间变化且服从瑞利分布的微小分量[6]。
3信道仿真
3.1Bellhop射线模型
Bellhop是美国海洋声学实验室开发的声学工具箱[7]中的常用声场模型之一——高斯射线跟踪模型,其基于射线理论,原理直观,算法简单,使用方便。用户可以根据实际海洋环境条件,如海深、声速剖面、海面海底形状和反射系数、海底介质属性、声源与接收器位置等参数,和想要得到的计算结果,如传播损失、本征声线、到达声场和接收时间系列等,按格式要求设置好输入环境文件(*.env),在Matlab下即可以仿真真实海洋信道对声传播的影响。
3.2仿真参数设置
海底、海面界面平整,海深50m,声速剖面为弱负梯度,海底为砂石底质,密度1.9g/cm3,衰减系数为0.8,砂石中声速为1650m/s。声源发射角度为,收发器的相对运动速度为10节/小时,约5m/s,信号是频率分别为3kHz和10kHz的单频信号。

表2 仿真参数
3.3本征路径选择
由于海水介质非均匀,加之海底海面反射,实际信道本征路径数量无法确定,但是从对接收信号影响的角度考虑,可以忽略那些能量损失比最小传播损失大20dB的路径[8]。
3.4多普勒频移分析及计算
由于海面波浪起伏,洋流、收发平台的相对运动,导致信号产生多普勒频移。而不同声线的出射角及入射角不同,导致不同本征路径上声线的相对速度不同,产生的频移量也不同,从而造成信号在频域上扩散。
假设声源运动速度为vs,接收平台运动速度为vr,声线发射方向与发射器运动方向之间夹角即发射角为θ1,入射声线与接收平台运动方向的夹角即入射角为θ2,声源指向接收器方向为正方向,则当发射声源频率为f0时,接收信号的多普勒频移为
(9)
用Bellhop射线模型进行分析,当环境文件输出结果类型设置为‘A’,时,会生成一个到达文件(*.arr),其数据格式如下:
1.16E-093669.4219.52-3.273.841312
分别代表接收端信号的相对强度、相位、时延、发射角度、接收角度、海面反射次数和海底反射次数。因此,根据射线理论和Bellhop输出结果选择为到达模式时很容易得出不同本征声线声源处的发射角度和接收端处的接收角度,时延及相对幅值,根据式(9)可求得每条本征路径的多普勒频移。
3.5仿真分析
根据上述的设置条件,仿真可以得出信道本征路径结构分布如表3所示,其中多径数栏上方为总多径数,下方为有效多径数。

表3 不同信道多途结构分布
信道1~4的冲击响应如图4所示,左侧为频率f=3kHz时,即信道1、2的仿真结果,右侧为10kHz时,即信道3、4的仿真结果。从表3和图4可以看出,随着频率、收发深度、收发距离的改变,信道多途结构的变化情况。
不难发现,频率对接受信号能量影响较大,频率越大,信号能量损失越快;而收发相对距离和深度的变化对多途结构影响较为明显,这进一步验证了水声信道的时变、频变和空变等特点对于通信系统性能的影响不可忽略。

图4 信道1~4的冲击响应
图5为信道1在不同观察时刻的频率响应特性,由于存在时变的多普勒和时延,从图上可以看出不同时刻信道呈现出不同的频率特性,但看不出其变化规律。
通常从统计的角度分析时变信道特点,大多数实验证明[9~11],在浅海信道中,当距离较近时,信道呈莱斯衰落,接收到的信号包络服从莱斯分布,相位服从均匀分布;而在中远距离时,直达信号衰减殆尽,信道呈瑞利衰落,接收到的信号包络服从瑞利分布,相位服从均匀分布。
图6为在通信速率为2kb/s时,QPSK调制时道信1的仿真结果与同样条件下的实测结果,实际多普勒偏移为10.3Hz,多普勒补偿误差为0.3Hz,实际误码率高于仿真误码率,这可能是忽略了少量有影响力的多途而导致,同时也表明实际信道比这更加复杂。
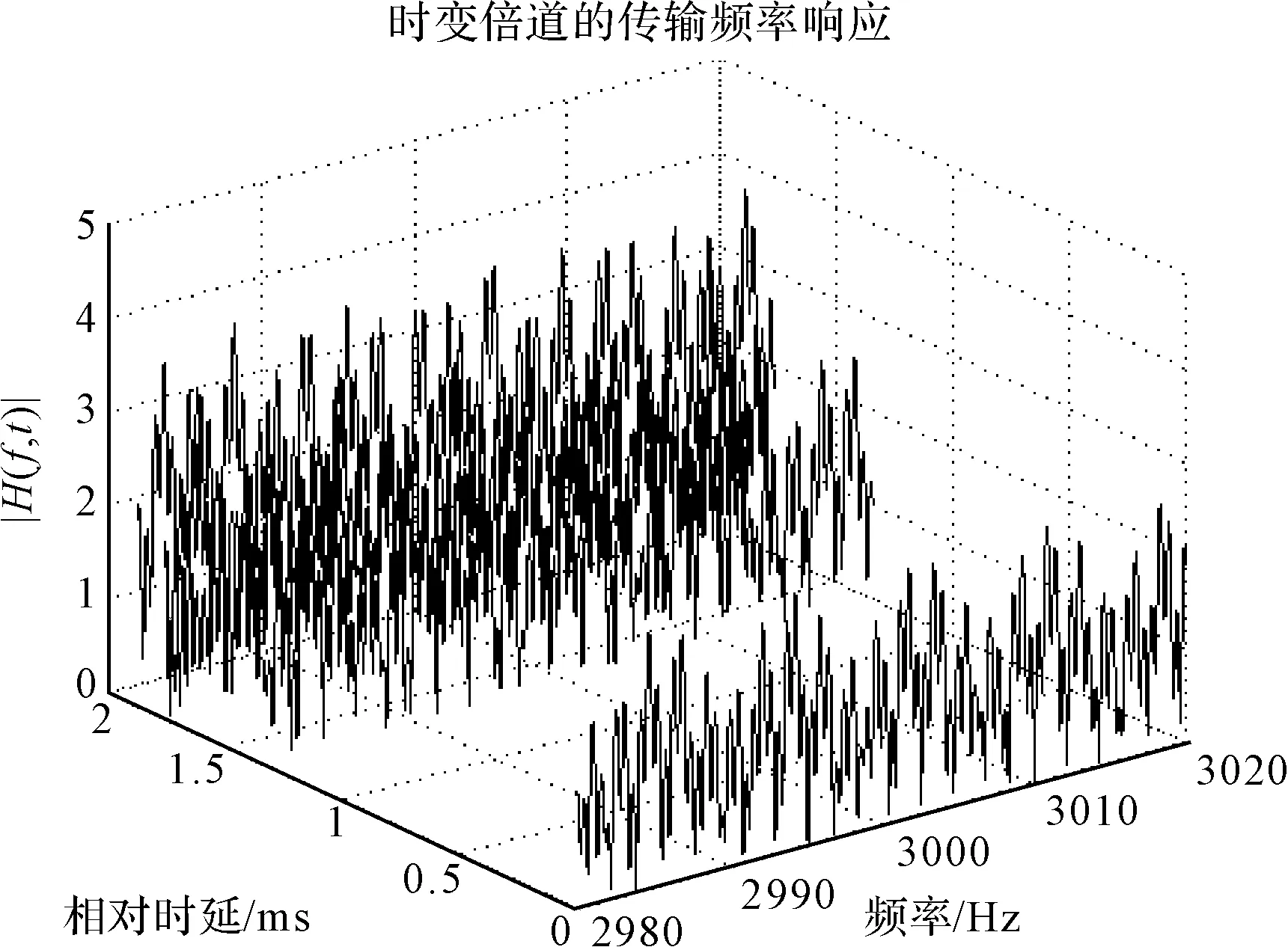
图5 时变信道1的频率响应

图6 仿真与实测误码率
4结语
本文提出的相干多途信道模型和时变信道模型,均是基于射线理论,基本上反映了水声信道的主要特点。但也存在一些不足,如边界条件比较理想,叠加的时变微小分量与实际情况可能存在一定差别,实际信道比这更加复杂。因此,要建立更加贴近实际的海洋信道模型还需进一步深入研究,但这并不妨碍其在水声通信性能估计和通信系统改进方面的应用。
参 考 文 献
[1] D.B. Kilfoyle and A.B. Baggeroer, The state of the art in underwater acoustic teleme-try[J]. IEEE Journal of Oceanic Engineering,2000,25(1):4-27.
[2] A. Essebbar, G. Loubet, and F. Vial. Underwater acoustic channel simulations for communication[C]//presented at the Oceans’94, Brest, France,1994.
[3] 惠俊英,生雪莉.水下声信道(第二版)[M].北京:国防工业出版社,2007.
[4] 朱昌平,韩庆邦.水声通信基本原理与应用[M].北京:电子工业出版社,2009.
[5] J. G. Proakis and M. Salehi. Communication systems engineering[M]. Upper Saddle River,N.J.: Prentice Hall,2002.
[6] 李国梁.水声相位相干通信与自适应均衡技术研究[D].西安:西北工业大学硕士学位论文,2007.
[7] URL[OL]. http://oalib.hlsresearch.com.
[8] 张歆.基于声场模型的水声通信特性与系统设计的研究[D].西安:西北工业大学博士学位论文,2000.
[9] T.C.Yang. Properties of underwater acoustic communication channels in shallow water[J]. J. Acoust. Soc. Am. 2012,131(1):231-236.
[10] M. Chitre.A High-Frequency Warm Shallow Water Acoustic Communications Channel Model and measurements[J]. J. Acoust. Soc. America,2007,122(5):2580-86.
[11] Milica Stojanovic, James Preisig. Underwater Acoustic Communication Channels: Propagation Models and Statistical Characterization[J].IEEE Communications Magazine January,2009:84-89.
Underwater Acoustic Channel Modeling and Simulation
GAN ZhongliangLI Liang
(No. 92785 Troops of PLA, Huludao125208)
AbstractModeling the underwater acoustic channel(UAC) is useful for prediction of a system performance via simulation and thus avoiding expensive ocean experiments.Based on ray theory, two traditional models are proposed, including coherent multipath channel model and time varying channel model.Although they are still not perfect compared with real channel,it didn’t hinder their application on performance predict of communication system because it’s really reveal some characteristics of underwater acoustic channel.
Key Wordsray theory, underwater acoustic channel, modeling, simulation
* 收稿日期:2015年11月12日,修回日期:2015年12月28日
作者简介:甘忠良,男,硕士,研究方向:通信与信号处理。李亮,男,工程师,研究方向:通信工程。
中图分类号TB533
DOI:10.3969/j.issn.1672-9730.2016.05.025
