2D雷达组网对空中目标高度估计仿真*
2016-06-21郭徽东
郭徽东 裴 雷
(92403部队51分队 福州 350007)
2D雷达组网对空中目标高度估计仿真*
郭徽东裴雷
(92403部队51分队福州350007)
摘要利用2D雷达的方位、距离信息形成组网雷达测定目标高度算法,分析不同位置误差、目标高度条件下几何量测理论误差,并利用滤波算法对组网雷达测高进行工程化应用,仿真结果表明估高算法的实用性。
关键词2D雷达网; 高度估计
Class NumberTN959.1
1引言
“全球鹰”、“捕食者”等无人机在全球开展各种侦查任务,尤其在我沿海抵近侦查任务越趋频繁,如何利用2D雷达进行组网布站,并对中高空目标进行较为准确的空间定位,从而引导海上舰艇、侦察机等其他传感器平台对其准确定位和连续跟踪,对中高空无人机目标的大范围预警具有重要意义[1]。
22D雷达组网测高
2D雷达只能直接测量到目标的距离和方位信息,无法直接得到飞行目标高度信息。通过多部雷达合理布站数据融合,综合利用来自多部雷达的资源和相关冗余信息,可以获得比运用单部、孤立的雷达更加详细而精确的目标位置[2]。
2.1两部2D雷达组网
可得目标高度表达式为
(1)
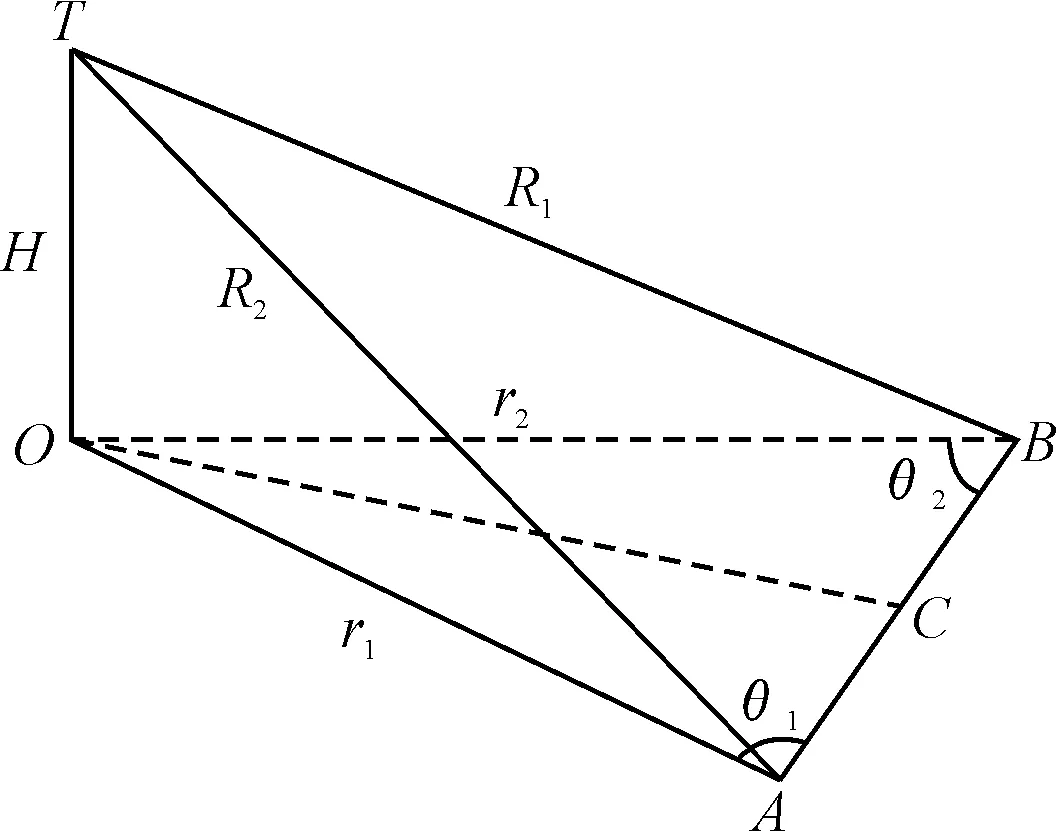
图1 双站雷达测高示意图
高度估计方差为σH,有
(2)
其中:
(3)
2.2三部2D雷达
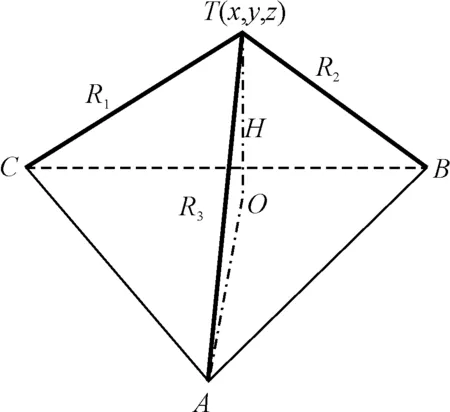
图2 三站雷达测高示意图
设目标的位置为T(x,y,z),三部雷达坐标分别为A(x1,y2,z1),B(x2,y2,z2),C(x3,y3,z3)。它们测得的同一批目标的斜距分别为R1、R2和R3,如图2所示。
由距离表达式可得[3]:
(4)
用第一式分别减去第二式、第三式可得:
(5)
因为三站不共线,所以
(6)
C1,C2,C3的表达式见文献[4]。
高度估计方差为σH,有:
(7)
3高度估计滤波
上节讨论的是组网雷达对空中目标定位的几何量测理论误差模型,为提高组网雷达对目标高度估计的准确性,可在理论误差模型基础上,对得到的几何量测进行滤波估计,所需量测误差见式(2)、式(7)。
为简化模型,不考虑地球曲率影响,假设雷达节点i在直角坐标系中的坐标为
(8)
雷达的跟踪滤波采用转换量测模型,此时雷达的观测模型可写成
Zi(k)=H(k)X(k)+Wi(k)
(9)
其中,H(k)∈Rm×n为测量矩阵。Wi(k)是均值为零、相互独立的高斯序列。Ri(k)是量测协方差矩阵。

(10)
(11)
(12)
基于式 (8) ~式(12),可以得到组网后目标高度的状态更新方程:

X^i(k)= X^i(kk-1)+Ki(k)
(13)
(14)
(15)

(16)
(17)
4仿真计算
4.1几何量测
仿真场景一:2D雷达1位置[X1,Y1]=[0km,0km],雷达2位置[X2,Y2]=[60km,0km],距离量测均方误差为100m,角度均方误差为1°,雷达3位置[X3,Y3]=[30km,30km],距离量测均方误差为100m,角度均方误差为0.5°,目标高度15000m;三部雷达形成等腰三角形配置。
仿真场景二:2D雷达1位置[X1,Y1]=[0km,0km],雷达2位置[X2,Y2]=[60km,0km]距离量测均方误差为100m,角度均方误差为0.3°,雷达3位置[X3,Y3]=[30km,60km],距离量测均方误差为100m,角度均方误差为0.3°,目标高度15000m。
图3、图4为场景一时的两部、三部雷达组网条件下对空中目标高度估计理论误差;图5、图6为场景二时两部、三部雷达组网条件下对空中目标高度估计理论误差;由图3、图5知,双站雷达组网对高空目标的高度估计误差较大,50km内目标高度估计误差约为1.6km~2km,理论估计误差为10%~13%;引入前置部署的雷达三组网后,对高空目标高度估计有显著改善,前出雷达平台附近30km内目标高度估计误差小于2%,50km内目标高度估计误差小于5%,可显著提高组网雷达的空中目标高度估计精度。

图3 场景一的两部雷达估高理论误差
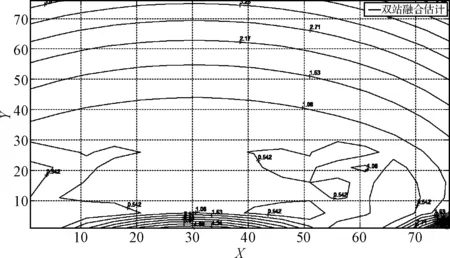
图5 场景二的两部雷达估高理论误差
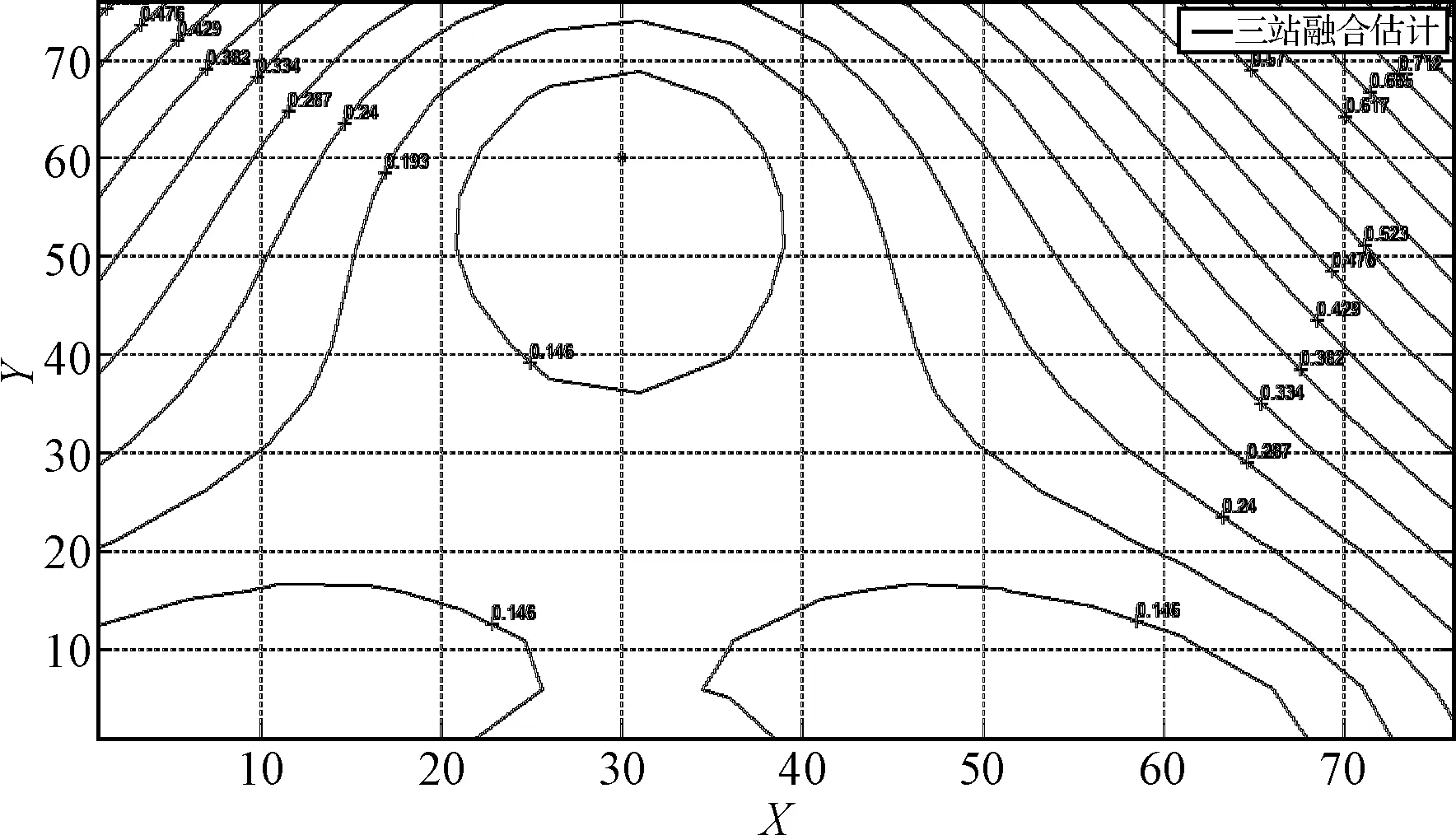
图6 场景二的三部雷达估高理论误差
4.2滤波估计
仿真场景三:目标高度分别为15000m、8000m、3000m,目标初始位置[X,Y]=[90km,90km],Vx=-100m/s,Vy=-100m/s,采样时间t=5s。图7为仿真场景三,目标向雷达网运动;不同高度的滤波估计见图8~图10。
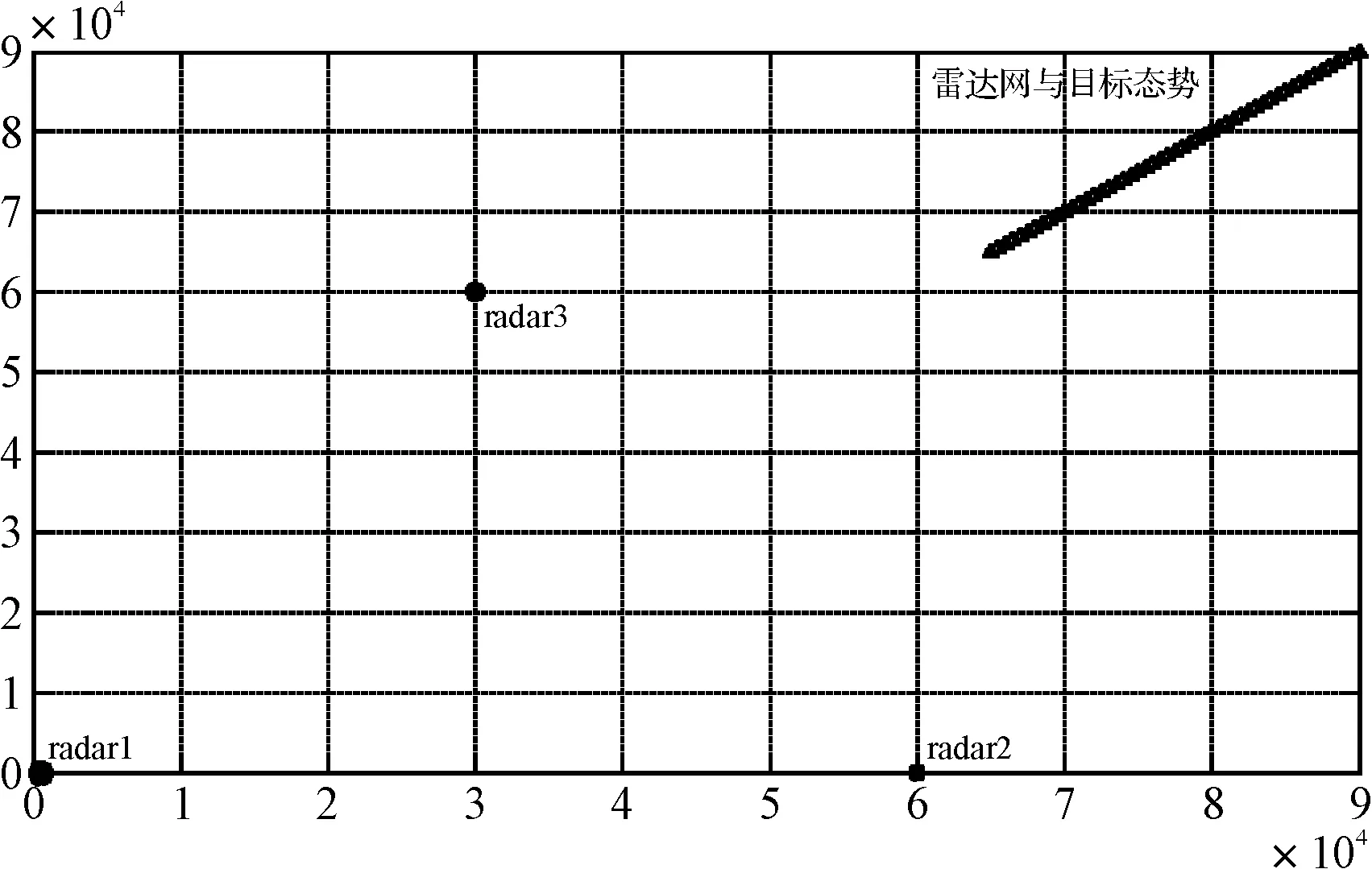
图7 仿真场景三
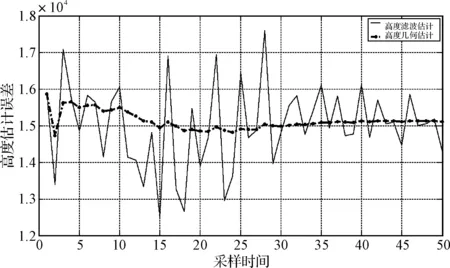
图8 高度15000m的滤波估计
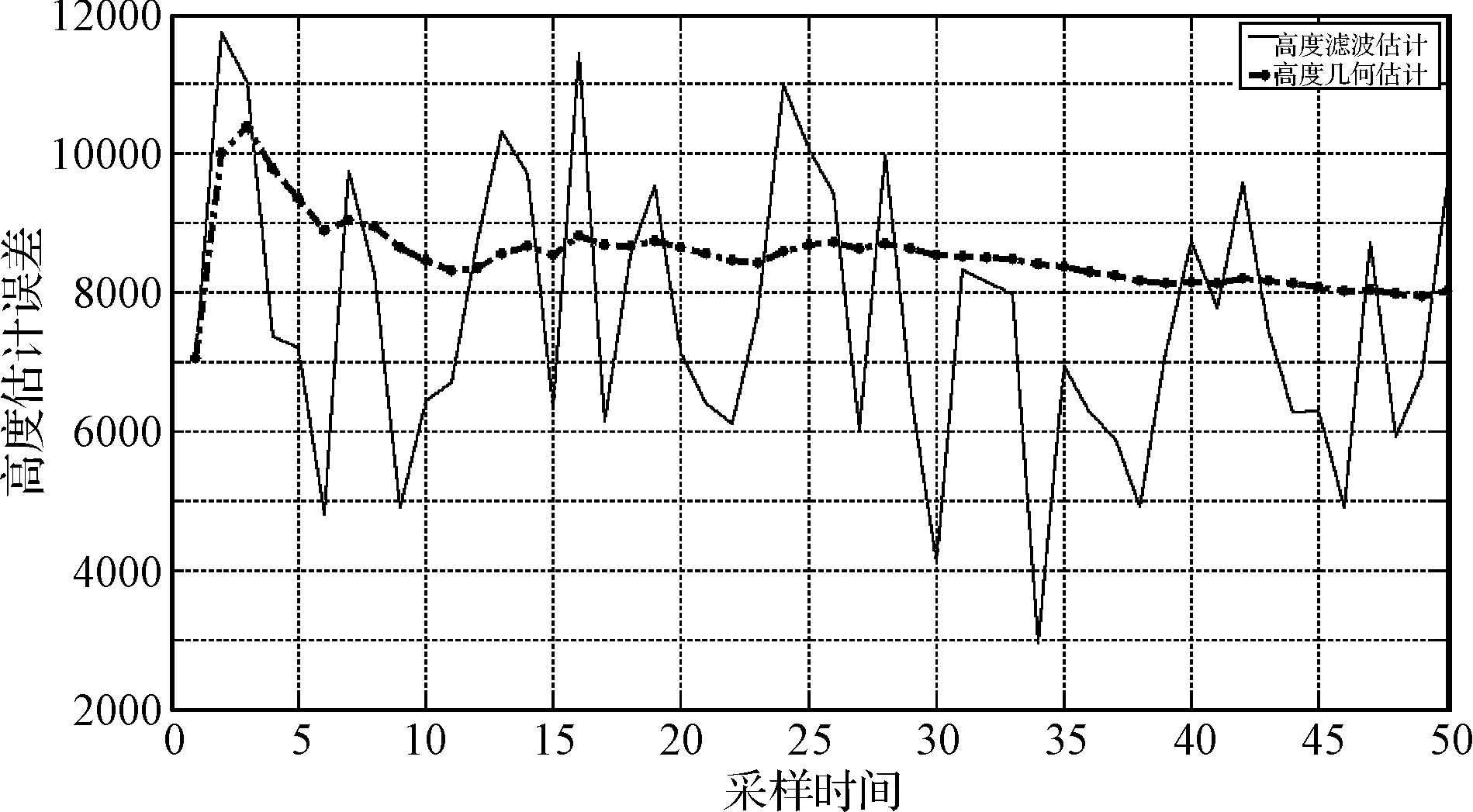
图9 高度8000m的滤波估计
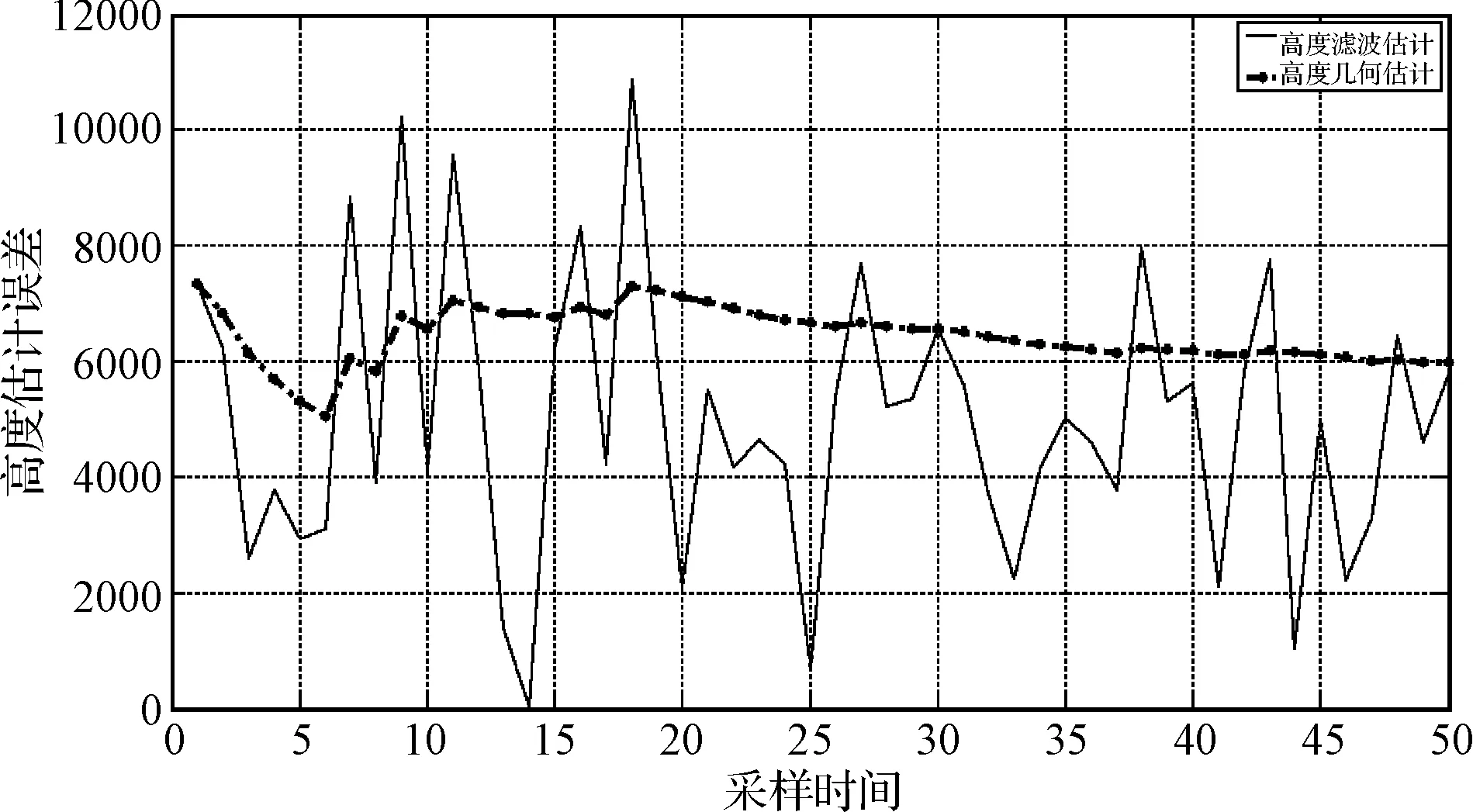
图10 高度3000m的滤波估计
仿真场景四:目标高度分别为15000m、8000m、3000m,目标初始位置[X,Y]=[90km,90km],Vx=-100m/s,Vy=0m/s,采样时间t=5s。图11为仿真场景四,目标向雷达网运动;不同高度的滤波估计见图12~图14。
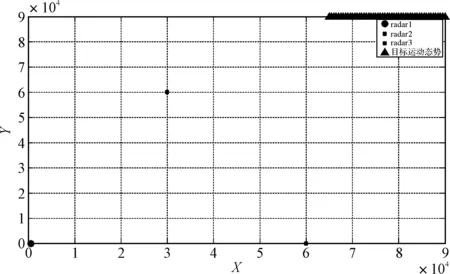
图11 仿真场景四

图12 高度15000m的滤波估计
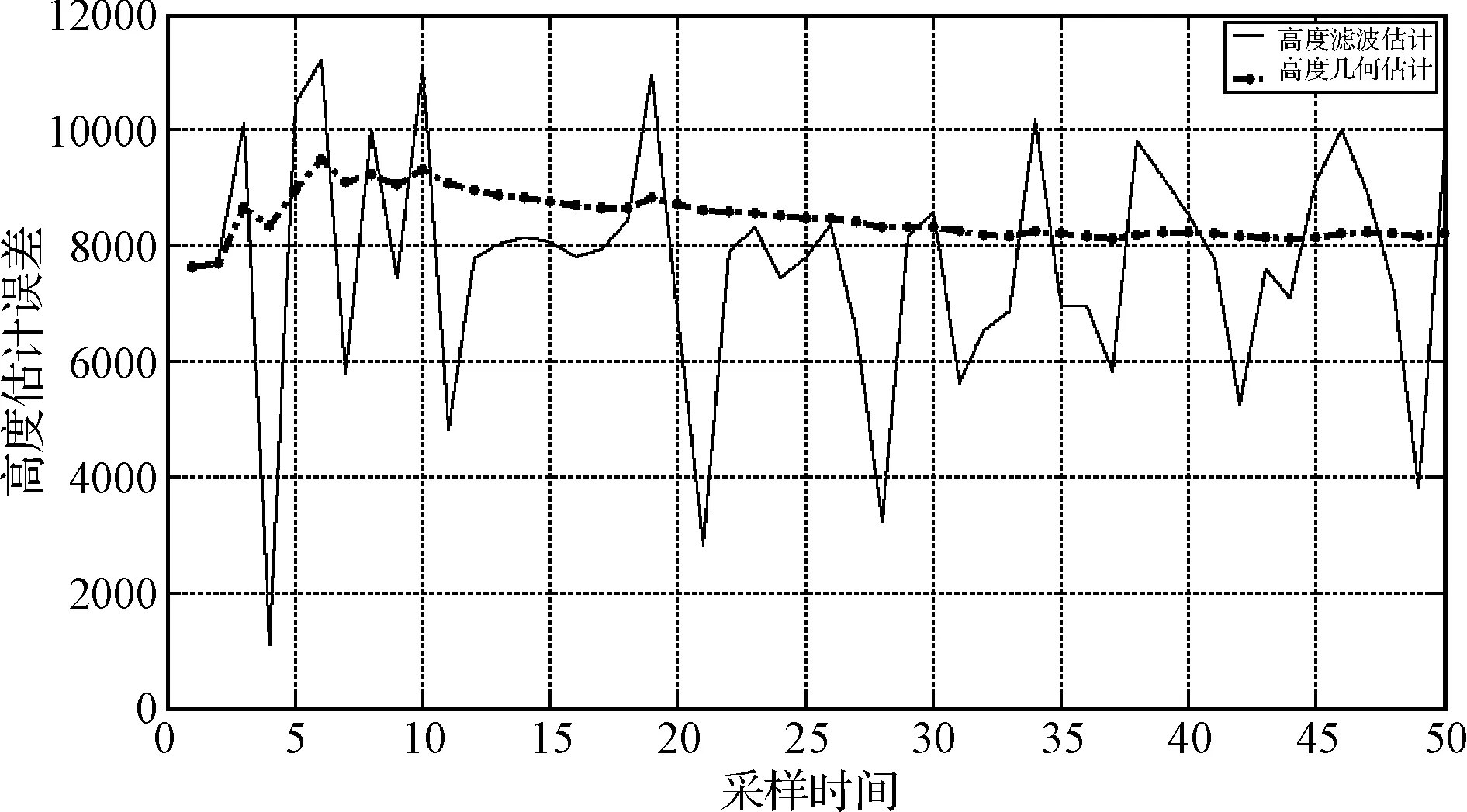
图13 高度8000m的滤波估计
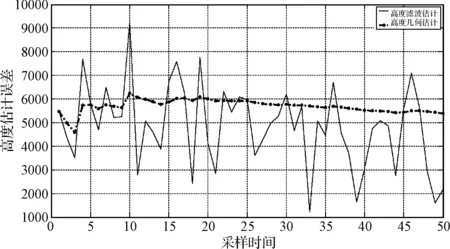
图14 高度3000 m的滤波估计
从场景三、四的不同高度目标估计结果看,高度越高,高度估计就相对精确,滤波稳定所需采样时间越短;15000m高度目标稳定滤波采样次数20~30次,估计误差小于2%;8000m高度目标稳定滤波采样次数30~40次,估计误差小于5%;3000m高度目标稳定滤波采样次数约40次,估计误差小于40%。图8~图10、图12~图14的仿真结果表明,整个滤波器的收敛过程比较明显,并且经过50次采样滤波后,高空目标(>8000m)高度的估计精度可以收敛到200m左右;这表明,本文提出的方法能够较好解决分布式结构2D雷达网高度估计问题,所得到的估计结果可以满足应用需求。
综合几何量测理论误差、滤波统计误差结果,可看出基于本文的目标高度估计方法的性能较好,滤波后效果将更加明显;用2D雷达对空间目标进行高度估计时,融合估计高度效果随目标高度的增加而随之加强,对于中低空目标估高性能明显下降;对于同一目标高度,雷达站距离目标越近,融合估计高度效果越好;同时,目标位置的定位误差与目标相对于雷达的几何关系密切相关,当三部雷达成等腰三角形配置,且目标在地面的投影与对应两雷达夹角在80°~110°时,估高性能较好。
5结论
本文对2D雷达组网目标高度估计进行理论误差分析,在此基础上进行滤波估计,得出一定条件下2D组网雷达对高空目标高度估计的可行性;由于篇幅限制,关于组网雷达高度估计的空间配置,距离、方位等因素对估高精度的影响如何等,有待进一步分析研究。
参 考 文 献
[1] 季华益.“全球鹰”及其对抗策略思考[J].航天电子对抗,2012(1):26-30.
[2] 雷雨,冯新喜.2D雷达组网几何定位融合算法[J].系统工程与电子技术,2011(5):1151-1156.
[3] 郭冠斌.两坐标雷达组网测高的可能性[J].1996(4):6-11.
[4] 卢盈齐,王睿,张平定.组网雷达跟踪系统目标高度测定算法[J].现代雷达,2002(7):24-26.
Simulation of Target Altitude Estimation in 2D-Radar-Network
GUO HuidongPEI Lei
(Unit 51, No. 92403 Troops of PLA, Fuzhou350007)
AbstractAn measurement model of altitude estimation with 2D radar network is presented, and kalman filter algorithm of target altitude is given, air-craft-height estimation with different sensor error and target altitude is achieved. The performance of the algorithms is analyzed and simulation results show that the algorithms is efficient.
Key Words2D-radar-network, target height estimation
* 收稿日期:2015年11月9日,修回日期:2015年12月27日
作者简介:郭徽东,男,博士,工程师,研究方向:雷达数据处理。裴雷,男,工程师,研究方向:信号分析处理。
中图分类号TN959.1
DOI:10.3969/j.issn.1672-9730.2016.05.020
