新生强度未知情形下多目标跟踪改进算法*
2016-06-21王华旭杨志清
王华旭 杨志清 邱 昊
(1.海军北海舰队司令部 青岛 266071)(2.海军工程大学电子工程学院 武汉 430033)
新生强度未知情形下多目标跟踪改进算法*
王华旭1杨志清1邱昊2
(1.海军北海舰队司令部青岛266071)(2.海军工程大学电子工程学院武汉430033)
摘要基于概率假设密度滤波框架的自适应新生强度(MAB-PHD)算法能有效解决新生区域未知情形下多目标跟踪问题。针对MAB-PHD在强杂波环境下势估计不准、跟踪精度低的问题,论文提出了一种基于隶属度函数的改进算法。该算法利用测量值后验信息,通过似然函数估计测量值属于新生目标的隶属度,并将其作为新生分量权重,同时结合新的预测和更新方程,降低了目标估计强度中包含的虚警信息,提高了跟踪性能。仿真结果表明,所提算法在目标状态和数目估计方面性能均优于现有算法。
关键词多目标跟踪; 概率假设密度; 新生目标; 序贯蒙特卡洛
Class NumberTN953
1引言
概率假设密度(Probability Hypothesis Density, PHD)滤波器是一种基于随机有限集(Random finite set, RFS)理论的多目标Bayes滤波算法。PHD滤波算法通过对密度函数的一阶统计矩递归得到多目标强度,避免了传统多目标跟踪算法中计算复杂的数据关联过程,近几年成为多目标跟踪领域研究的热点。Mahler首先对该算法进行了理论推导[1],文献[2]给出了PHD的高斯混合(Gaussian mixture, GM)实现,针对非线性情形下没有解析解的问题,文献[3]提出了PHD的序贯蒙特卡洛(Sequential Monte Carlo, SMC)实现,解决了算法中积分运算问题。文献[4~5]分析了两种实现方式的收敛性。
PHD算法假设在任意时刻新生目标的出生区域已知,即算法强调若干特定的“出生点”,显然这只适用于少数特殊情况(如航母、飞机场等)。如果新生目标出生区域未知,在标准PHD滤波框架下需要使表示新生目标强度的高斯混合分量或采样粒子覆盖整个区域,这将极大增加计算量而且效率低下。针对此问题,一些学者提出了改进方案[6~7]。文献[8]通过数据关联将测量值分类,通过最大后验概率(Maximum a posterior, MAP)和熵函数估计新生目标强度,该方法能有效改善PHD对目标数目的估计,但数据关联和熵函数计算过程复杂。文献[9]假设新生目标概率密度在观测区域均匀分布,在更新步中通过积分的方法将新生目标强度中的非高斯分量近似的转化为高斯分量,因此该算法仅适用于GM实现。
文献[10~11] 提出了一种适用于非线性非高斯情形下的自适应新生强度算法(MAB-PHD)。通过引入标签指示估计目标是新生目标还是存活目标,并基于观测方程和部分先验知识对新生目标强度进行估计,能有效解决新生区域未知时的多目标跟踪问题。 该算法在预测步根据当前时刻所有测量值产生强度均匀的新生目标,当杂波强度较大时,预测步产生的大量虚警将严重影响存活目标更新强度。针对上述问题,本文在现有算法基础上作出了以下改进:通过引入基于后验概率的隶属度函数作为新生目标权重,并综合利用相邻时刻测量值信息,避免了现有算法在强杂波环境下产生大量虚警的现象,进而改善了滤波器对目标数目和状态的估计性能。最后,通过比较两种算法多次蒙特卡洛实验结果,验证了改进算法的有效性。
2背景知识
多目标跟踪问题目标状态的动态模型可描述为
xk=fk-1(xk-1)+vk-1
(1)
zk=hk(xk)+wk
(2)
式(1)和式(2)分别表示状态转移方程和观测方程,其中fk(·)是一阶马尔科夫状态转移函数,hk+1(·)是观测似然函数。vk与wk分别代表处理噪声和观测噪声,假设噪声的概率密度函数已知,通过式(1)和式(2)可以对目标状态进行正确但粗糙的估计。PHD算法通过递推随机集密度一阶统计量,从中提取出目标个数和各目标状态,其具体的理论推导过程可参考文献[1],本文仅进行扼要说明。
令Dk(xk)表示多目标后验强度,其中xk描述了目标状态,为描述简洁下文省略其下标;Zk={zk,1,…,zk,m(k)}代表k时刻测量集合,PHD预测方程为

Dk|k-1(x) =∫pS,k(ζ)πk|k-1(x|ζ)Dk-1(ζ)dζ
(3)
更新方程为
Dk|k(x)=[1-pD,k(x)]Dk|k-1(x)
(4)
其中πk+1|k(·|x)是状态转移概率,pS,k(x)表示目标存活概率,βk|k-1(x|ζ)和γk(x)分别表示衍生和新生概率密度,更新步中Ck(z,x)=pD,k(x)gk(z|x)Dk|k-1(x),gk(z|x)是似然函数,pD,k(x)表示目标探测概率,κk(z)为虚警密度。
3MAB-PHD算法
由上节描述可知,PHD算法假设新生目标强度已知,但在多数场景中该条件过于苛刻,针对这一问题,文献[11]提出了一种自适应新生强度算法,该算法通过标签值区别存活和新生目标,在预测步中根据测量值和部分先验信息产生新生目标,最后通过PHD更新步得到目标状态估计。
首先引入标签β指示目标种类:

(5)
目标状态可表示为x=(y,β),目标存活和探测概率与是否为新生目标无关,故
pS,k(x)=pS,k(y,β)=pS,k(y)
(6)
pD,k(x)=pD,k(y,β)=pD,k(y)
(7)
由新生和存活目标状态转移关系易知状态转移函数为
πk|k-1(x|x′)=πk|k-1(y,β|y′,β′)
(8)
将式(5)~式(8)代入式(3)可得到新的预测方程为
Dk|k-1(x)=
(9)
文献[11]给出了新生目标区域未知时新生目标强度的估计方法,对当前时刻∀z∈Zk,通过bk(·|z)得到强度均匀的新生分量,bk(·|z)是基于似然函数和部分先验知识拟合得到的新生目标后验密度,其实现方式在第4节给出。
观测函数不依赖β,故有gk(z|x)=gk(z|y),和预测方程类似,根据式(4)可以得到新的更新方程为

Dk|k(x) =[1-pD,k(y)]∑β=0,1Dk|k-1(y,β)
(10)
最后输出Dk|k(y,0)作为目标状态估计。
4基于隶属度函数的自适应新生强度算法
MAB-PHD算法新生分量由预测步产生,可表示为
(11)
由上节可知,分量强度均为wk|k-1,当杂波强度较大时,Dk|k-1(y,1)中虚警分量强度和数目远多于目标分量,并且所有分量直接参与迭代更新,使存活目标包含过多的杂散信息,导致势估计和跟踪精度降低。本文在更新步引入基于后验概率的隶属度函数作为新生分量权重,并在下一时刻利用最新的测量值信息,使新生分量中目标和杂散比重更接近真实值,最后通过PHD更新方程求得目标强度估计。
为了减小杂散对存活目标更新强度的影响,预测步不再产生新生目标,则预测方程可简化为
Dk|k-1(x)=
(12)
因为预测强度不再含有新生分量,根据全概率公式,Ck(z,x)可以作为测量值z是存活目标x产生概率的估计,借用模糊理论中隶属度的概念,引入权重函数作为测量值是新生目标或杂散产生的概率估计。
令uk(z)=∫Ck(z,ζ)dζ,建立隶属度函数
(13)
tA,k(z)是预先设定的门限值,wA,k(z)为权值函数,表征当前时刻某测量值z是非存活目标产生的可能性,所以测量值可以写为
Zk={Zk,b,Zk,p}
(14)
其中Zk,p表示该组测量值是存活目标产生,Zk,b是新生目标或杂散产生。
将式(13)~式(14)代入式(4),新的更新方程可以写为
当β=0时:
Dk|k(x)=[1-pD,k(y)]Dk|k-1(y,0)
(15)
β=1时:
(16)
在新生区域未知时,先验密度γk(x,z)=const,最后,选择式(15)得到存活目标作为目标状态输出。
5改进算法的序贯蒙特卡洛实现
5.1预测
假设k-1时刻,目标后验状态的粒子描述为
(17)

(18)
则目标预测强度的粒子描述为
(19)
5.2更新
首先需要计算测量值权重函数,对∀z∈Zk,根据定义计算uk(z)的粒子描述:
(20)
隶属度函数作为测量值归属的概率估计可以选择计算复杂度较低的降半梯形分布,即
wA,k(z)=1-uk(z)
(21)
以虚警值为门限对测量值分类,tA,k(z)=κk(z),至此可得到Zk,b,Zk,p。
根据式(15)更新存活粒子及其权重:
(22)
(23)
对z∈Zk,b,通过对拟合的新生后验分布函数bk(·|z)采样得到新生目标粒子:
(24)
其中bk(·|z)可以用以下方式确定,令目标状态x={xo,xu},其中xo为可观测部分,xu是不可观部分,假设观测函数可逆,且观测噪声w~N(0,R),变换观测函数可得到:
xo=h-1(z-w)
(25)
对式(25)进行Taylor展开得到:xo=h-1(z)+h*(z)w+high-orders,其中h*是h-1的Jacobi矩阵,则xo的密度函数可近似表示为
N(h-1(z),h*Rh*T)
(26)
xu的密度函数通过目标状态的先验知识获得,最后,通过式(16)求得新生目标粒子权重:
(27)
其中Lk代表单个新生目标的采样粒子数。
5.3重采样及状态提取
(28)
因为在更新步骤中得到了权重均匀的新生目标粒子,本文仅对存活粒子进行重采样,重采样后粒子标签值不变,最后通过K均值聚类方法提取目标状态。
6仿真与分析
(29)
有效观测区域为[-1000m,1000m]×[-1000m,1000m],观测方程为
(30)
实验中目标的运动情况为:初始时刻在观测区间随机产生两个目标,从t=30s开始每隔25s产生一个位置随机的新生目标,速度值均匀分布于区间[-Vmax,Vmax],Vmax取决于传感器性能,本文取Vmax=20m/s,扫描时间长度100s,单个目标的采样粒子数为1000,OSPA参数设置为c=200,p=2。
图1对比了改进算法(iMAB-PHD)与MAB-PHD单次实验方位跟踪结果,可以看出两种算法均能对新生目标进行有效跟踪,但MAB-PHD虚警、漏警明显多于iMAB-PHD。
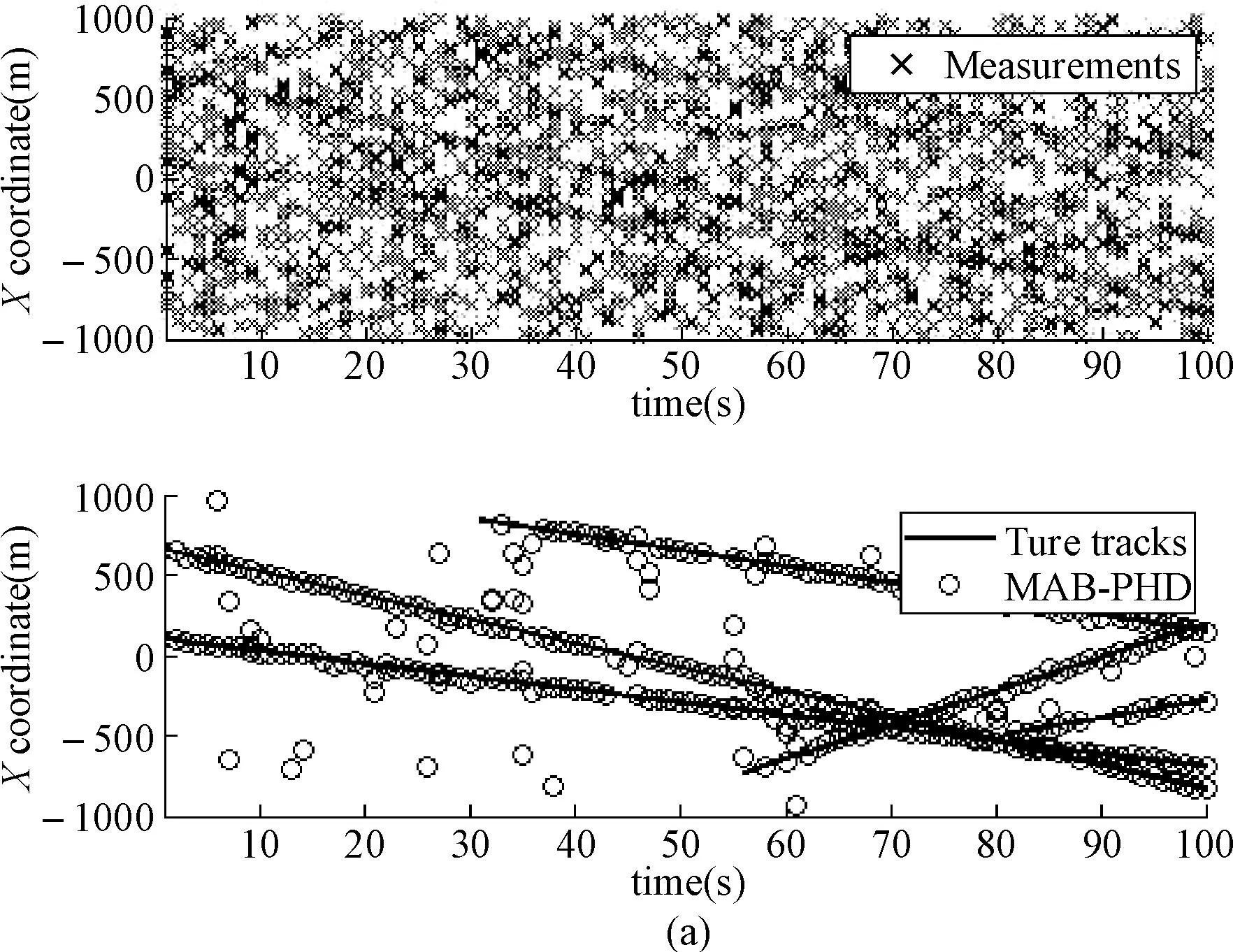

图1 x轴方位估计结果
图2对比了两种算法100次蒙特卡洛实验的势估计平均值和标准差,可看出改进算法势估计更接近真实值,估计波动范围更小,同时由图2(a)可知两种算法势估计在新生目标出现时刻(30s,55s,80s)均会出现几个时间间隔延迟,由于观测值没有提供速度信息,故需要通过几个时间步的筛选以保留新生粒子群中速度较接近真实值的部分。


图2 目标个数估计结果
图3对比了不同杂波强度下iMAB-PHD和MAB-PHD算法的平均OSPA脱靶距离。


图3 不同杂波强度下平均OSPA距离
可以看出,随着杂波强度增加,iMAB-PHD的OSPA距离明显小于MAB-PHD算法,除此之外,MAB-PHD算法直接对新生粒子进行重采样使计算量大大增加。
7结语
在新生区域未知情形下,文献[11]提出的自适应新生强度PHD算法能够对目标进行有效跟踪。本文在深入研究现有算法基础上,通过改变新生分量权重和产生方式改善了原算法在强杂波坏境下对目标数目和状态估计精度严重下降的问题,为减少更新后的虚警,新生目标不再在预测步中产生,同时引入隶属度函数降低虚警对存活目标强度的影响,通过对比两种算法多次蒙特卡洛实验的平均结果,表明改进算法势估计更接近真实值,并且估计方差更小,验证了算法的有效性。
参 考 文 献
[1] Mahler R. Multi-target Bayes filtering via first-order multi-target moments[J]. IEEE Transactions on Aerospace and Electronic Systems,2003,39(4):1152-1178.
[2] Vo B N, Ma W K. The Gaussian mixture probability hypothesis density filter[J].IEEE Transactions on Signal Processing,2006,54(11):4091-4104.
[3] Vo B N, Singh S, Doucet A. Sequential Monte Carlo methods for multi-target filtering with random finite sets[J]. IEEE Transactions on Aerospace and Electronic Systems,2005,41(4):1224-1245.
[4] Clark D, Vo B N. Convergence analysis of the Gaussian mixture PHD filter[J]. IEEE Transactions on Signal Processing,2007,55(4):1204-1212.
[5] Clark D, Bell J. Convergence results for the particle PHD filter[J]. IEEE Transactions on Signal Processing,2006,54(7):2652-2660.
[6] Kemouche M S, Aouf N. A GMM-based multi-target tracking algorithm and analysis[C] //International Conference on Information Fusion, Cologne: IEEE Press,2008:1-7.
[7] 闫小喜, 韩崇昭.基于目标出生强度在线估计的多目标跟踪算法[J].自动化学报,2011,37(8):963-972.
[8] Zhou X L, Li Y F, He B W, et al. Birth intensity online estimation in GM-PHD filter for multi-target visual tracking[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura(Portugal): IEEE Press, 2012:3893-3898.
[9] Beard M, Vo B T, Vo B N, et al. A partially uniform target birth model for Gaussian mixture PHD/CPHD filtering[J]. IEEE Transactions on Aerospace and Electronic Systems,2013,49(4):2835-2844.
[10] Ristic B, Clark D, Vo B N. Improved SMC implementation of the PHD filter[C]//13th Conference on Information Fusion(FUSION), Edinburgh: IEEE Press,2010:1-8.
[11] Ristic B, Clark D, Vo B N, et al. Adaptive target birth intensity for PHD and CPHD filters[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012,48(2):1656-1667.
Improved Multi-target Tracking Algorithm with Unknown Birth Intensity
WANG Huaxu1YANG Zhiqing1QIU Hao2
(1.Navy North Sea Fleet Command, Qingdao266071)(2.School of Electronic Engineering, Naval University of Engineering, Wuhan430033)
AbstractThe measurement-driven adaptive birth intensity filter (MAB-PHD) based on probability hypothesis density theory is an effective algorithm for multi-target tracking with unknown birth intensity. However, when in a denser clutter circumstance, MAB-PHD will loss accuracy of cardinality and state estimation dramatically. An improved algorithm is proposed to solve this problem. This paper introduces a membership degree which indicates the likelihood a measurement is generated by newborn targets as the weight of target birth intensity, combined with more reasonable predict and update steps to improve the problem of accuracy decrease caused by false alarms. Compared with existing algorithm, simulation results show that the proposed algorithm can improve the performance of filter with strong clutter background.
Key Wordsmulti-target tracking, probability hypothesis density, newborn target, sequential monte carlo
* 收稿日期:2015年11月3日,修回日期:2015年12月26日
基金项目:国家高技术研究发展计划(863)课题项目(编号:2014AA7014061资助)。
作者简介:王华旭,男,工程师,研究方向:通信技术。杨志清,男,工程师,研究方向:通信工程与设计。邱昊,男,博士研究生,研究方向:信息对抗技术。
中图分类号TN953
DOI:10.3969/j.issn.1672-9730.2016.05.009
