基于LM-PSO算法和BP神经网络的非线性预测控制
2016-06-18王炳萱李国勇王艳晖
王炳萱,李国勇,王艳晖
(太原理工大学 信息工程学院,太原 030024)
基于LM-PSO算法和BP神经网络的非线性预测控制
王炳萱,李国勇,王艳晖
(太原理工大学 信息工程学院,太原 030024)
摘要:针对非线性系统,提出了一种基于BP神经网络的预测控制方法。以BP神经网络建立多步预测模型并预测系统输出值,用LM (Levenberg-Marquardt)算法和PSO(Particle Swarm Optimization)算法组合的混合算法对目标性能指标函数进行滚动优化求解,得到非线性系统的最优控制量;利用误差修正参考输入法实现反馈矫正。通过将粒子群算法引入LM算法,克服了LM算法依赖初值和粒子群算法过早收敛于局部极值的问题,提高了求解的运行速度和精确度。通过对单变量非线性系统仿真实验,证明了该控制系统具有良好的稳定性、自适应性和鲁棒性。该方法可在数学模型不确定的情况下设计出有效的预测控制器。
关键词:非线性系统;预测控制;LM算法;粒子群算法;BP神经网络
模型预测控制(Model Predictive Control,MPC)最初提出时针对的是线性系统,用线性模型对对象进行预测,而用线性模型优化处理具有强非线性的对象时会使得输出预测与实际结果存在较大偏差,从而失去最佳的控制效果[1-2]。近年来,国内外许多专家学者针对非线性系统的本质特点,提出许多预测模型,文献[3-4]提出了Wiener模型,文献[5-6]提出了Hammerstein模型,但上述模型只适用于某些特定场合,辨识难度较大,并具有一定的约束性。本文选用BP神经网络(Back Propagation neural network)作为预测模型。BP神经网络实质功能为输入到输出的映射,具有良好的泛化能力,在选取合适的隐含层和隐节点时可以实现任何复杂的非线性映射关系[7]。
滚动优化是预测控制的重要组成部分,其通过反复优化目标函数从而求取最优控制量[8]。文献[9-10]采用LM算法求解控制量。LM算法收敛速度快、稳定性强,且避免陷入局部极值,可有效地求解优化目标函数,但其也存在过于依赖初值的问题[11-12]。
针对上述问题,笔者利用粒子群算法的简单易行且可调参数较少等优点,将其引入LM算法,解决了LM算法对初值的依赖问题,提高了算法的精确度。该非线性系统预测控制方法以BP神经网络对非线性系统进行建模,LM-PSO算法对目标性能函数进行滚动优化求解最优控制量。仿真结果表明,LM-PSO-BP预测控制方法具有良好的控制性能。
1神经网络预测模型
将如下单输入单输出(SISO)非线性离散系统作为被控系统[13]:



(1)
式中:n为系统输出y(t) 的阶次;m为系统输入u(t)的阶次;d+1为系统的时滞;f为非线性函数。
选用3层BP神经网络来建立非线性系统预测模型,可表示为:

(2)
式中:ym为预测模型输出值;wi为隐含层神经元与输入层神经元之间的连接权值;wij为输出层神经元与隐含层神经元之间的连接权值;p为输入层节点数;1为输出层节点数;q为隐含层神经元个数;g(·)为激活函数,选取Sigmoid型激活函数
为得到对未来的多步预测输出,对式(2)中的预测模型的基础上建立多个简单的BP神经网络,第l个BP神经网络可表示为:
(3)
2反馈校正
由于对象和环境等因素存在随机性和不确定性,在t时刻实施控制后,被控对象的实际输出y(t)与预测模型输出ym(t)之间可能存在一定偏差,因此形成预测误差:
(4)
此误差经过加权后对系统未来的输出进行预测,表示为:
(5)
式中,h=[h1,h2,…,hp]T为反馈校正矢量,h1=1.
3滚动优化
构造目标性能函数如下:
(6)
(7)
式中:简化加权系数λ(j)为λ(常数);α为柔化系数,0<α<1;yn为实测模型输出值;yr为系统给定值;ye(k+j)为期望输出序列。
通过求解Jmin来确定最优控制增量,使系统在未来n(p≥n≥m)个时刻系统实际输出值尽可能接近系统期望值。
3.1LM算法
LM算法是梯度下降法与Gauss-Newton法的结合。当μ增大时,算法与梯度下降法相似,发挥其全局特性;当μ减小时,算法接近Gauss-Newton法,发挥其局部收敛特性[14]。LM算法采用近似的二阶导数信息,所需迭代时间较少,收敛非常迅速,算法稳定性较好,避免陷入局部最小值。其迭代公式为
(8)
式中:uk为第k次迭代时控制输入序列;uk+1为新一时刻的控制输入序列;μ是阻尼因子;ek为误差;E(u)为误差函数;A(uk)是Jacobian矩阵。
(9)
(10)
3.2粒子群算法
通过模拟研究鸟群捕食的过程,KENNEDY和EBERHART提出了粒子群(PSO)优化算法。由于PSO算法操作简单易行,需调参数较少,尤其适用于求解复杂非线性问题[15]。
粒子速度和位置的更新公式如下:
(11)
(12)
式中:i=1,2,…,N;d=1,2,…,D;c1,c2为加速因子,通常取c1=c2;r1和r2为[0,1]区间内的随机数;w为惯性权重,w=w1-(w1-w2)k/kmax,w1为初始惯性权重,w2为终止惯性权重,kmax为最大迭代次数;l为速度约束因子。
为防止粒子在搜索过程中因搜索空间范围过大而导致粒子发散,将限制粒子的速度、位置在区间[vmin,vmax],[xmin,xmax]之内。
3.3LM-PSO算法
将LM算法和PSO算法组合提出了LM-PSO算法。LM-PSO算法利用了LM算法在接近局部极小值时收敛速度快、搜索精度高等优点,和PSO算法的全局快速收敛能力,并克服了LM算法过于依赖初值和PSO算法易陷入局部极值的缺点。
先利用PSO算法对目标性能函数进行求解得到一个优化控制量结果即群体最优解,将该结果作为LM算法的初始值,反复迭代得到符合条件的最优解即最优控制量。算法步骤如下:
1) 初始化粒子群中的参数,将待优化控制量uk设为初始粒子。设置每个粒子当前最优位置为pi,当前全体粒子中的最优位置为pg,即pg=pimin.
2) 根据式(11)、式(12)更新粒子的速度和位置,计算各粒子的适应度值,记录个体极值pi和群体极值pg.
3) 将每个粒子的当前位置与pi相比较,若优于pi,则对pi进行更新;否则,pi保持不变。
4) 将每个粒子的当前pi与pg相比较,若优于pg,则对pg进行更新;否则,pg保持不变。
5) 若满足终止条件达到最大迭代次数,则终止迭代,pg为群体最优解,即当前最优控制量;否则,返回步骤2) .
6) 给出训练误差允许值e,β,μ0,令k=0,μ=μ0.将由PSO算法得到的群体最优解pg作为LM算法的初值u0.
7) 由式(8)计算k+1时刻控制量uk+1,由式(3)和式(4)计算目标函数值Jk+1.
8) 按式(9)计算Jacobian矩阵A(u) .
9) 若E(uk)<ε,uk为最优控制量,转至步骤11);否则,以uk+1为新的初值计算误差指标函数E(uk+1)=uk+1E(uk) .
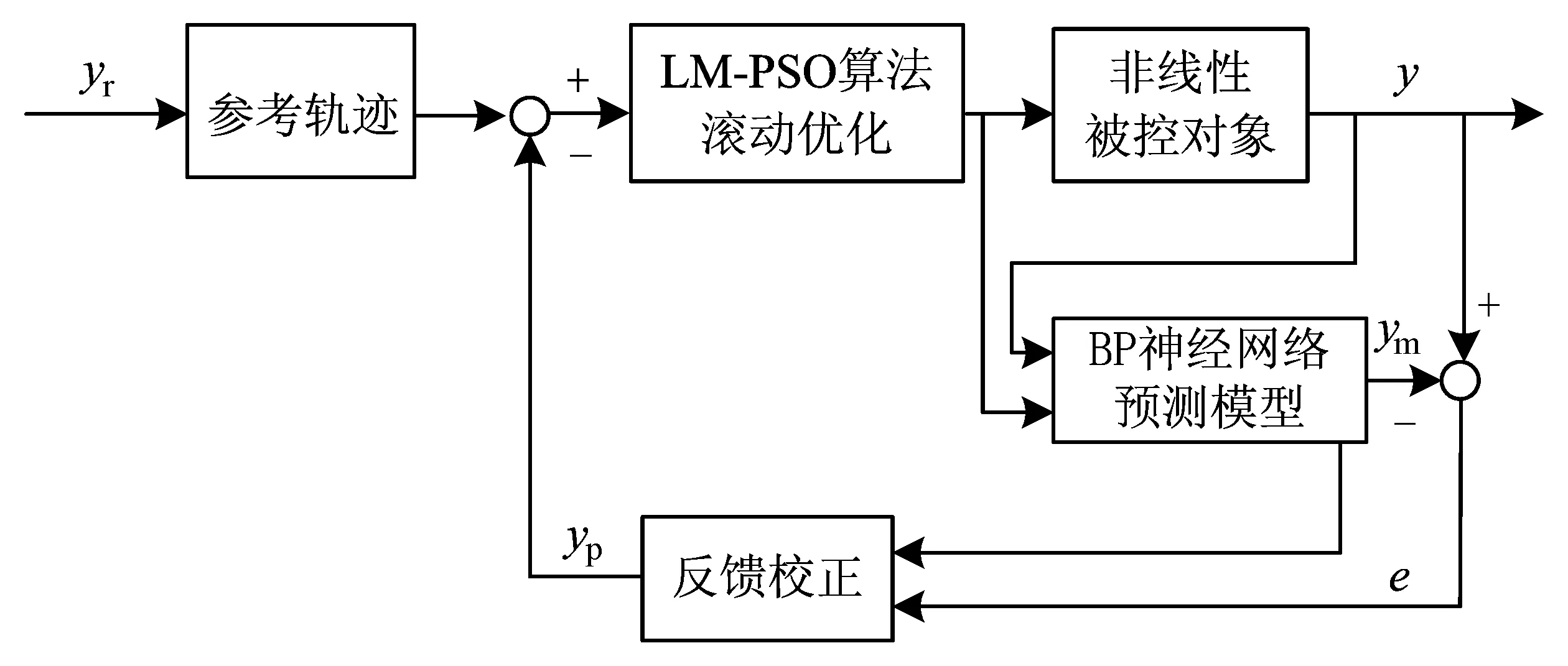
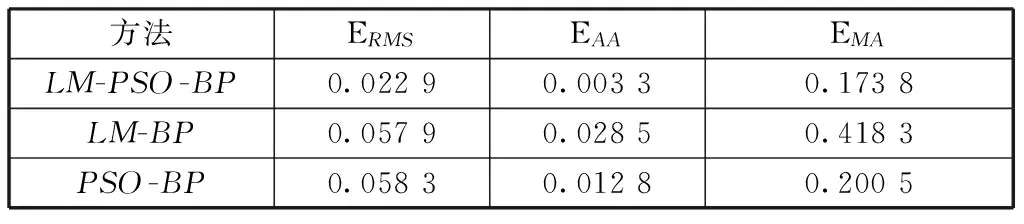
10) 若E(uk+1) 11) 停止。 4预测控制结构图 预测控制结构图如图1所示。针对非线性被控对象,以BP神经网络建立多步预测模型并预测系统输出值ym,通过反馈校正减小预测误差e,利用LM-PSO算法对目标性能函数J进行滚动优化,求解出最优控制量uk,从而实现对非线性系统的预测控制。 图1预测控制结构图Fig.1 Block diagram of predictive control 5仿真分析 非线性对象数学模型描述如下: (13) 产生一组均匀分布的随机序列作为输入,将300组数据用于离线建模,前200组数据用于训练神经网络,后100数据用于测试。 图2 BP神经网络预测结果Fig.2 Prediction results of BP neural network 从图2所示的预测结果计算得到,其平均绝对误差为0.010 4,最大绝对误差为0.032 2,表明该模型预测精确度较高。 以方波信号作为输入进行仿真,频率为10Hz.在进行预测控制时,BP神经网络参数选择为:学习速率θ=0.5,惯性系数α=0.05;LM算法的参数选择为:e=10-6,β=10,μ0=0.001;PSO算法参数选择为:c1=1.5,c2=1.5,w1=0.9,w2=0.4.同时采用如下3个性能指数来评价控制方法的跟踪性能:均方根误差(ERMS),平均绝对误差(EAA),最大绝对误差(EMA): (14) (15) (16) 式中:N为步长;yi为第i步的实际输出值;yri为第i步的系统给定值。 为验证本文提出的预测控制方法的有效性,并检验该方法在模型失配情况下的控制效果,在k=120时改变非线性对象模型为: (17) 其控制结果如图3所示,模型失配前后性能指标对比结果分别如如表1、表2所示。 图3 系统输出曲线Fig.3 Curves of system outputs 方法ERMSEAAEMALM-PSO-BP0.00750.00200.0590LM-BP0.05710.01490.4695PSO-BP0.05230.01650.2929 表2 模型失配下3种控制方法跟踪性能 从图3和表1中看出,在模型失配前,3种优化方法均能使控制系统到达稳态;但LM-PSO-BP比LM-BP和PSO-BP表现出更快的响应速度、更少的超调时间和更准确的控制精度,且与其他两种方法相比,LM-PSO-BP的实际输出值与预测输出值之间的误差更小。证明LM-PSO-BP具有更好的目标函数优化能力。 由表2可知,在k=120时,系统模型失配后,LM-PSO-BP的控制量迅速发生改变并达到状态,其所需调整步数明显优于LM-BP和PSO-BP,且性能指标ERMA,EAE和EMA均低于其他两种方法。实验证明,基于LM-PSO-BP的预测控制方法能够很快消除干扰带来的影响,使系统更快更好地达到稳定状态。 为验证本文方法的抗噪声干扰能力,在k=120时给系统施加一个干扰信号,即d(120)=0.2,控制结果和误差如图4所示,性能指标对比结果如表3所示。 图4 加入干扰信号的系统输出曲线Fig.4 Curves of system outputs under interference signal 方法ERMSEAAEMALM-PSO-BP0.04630.01110.3857LM-BP0.07530.01950.5510PSO-BP0.11770.02930.9481 从图4和表3可以看出,系统在加入干扰信号后,LM-PSO-BP的响应速度、超调时间、与系统预测输出值之间的训练误差等均优于LM-BP和PSO-BP,证明LM-PSO-BP具有更好的抗干扰能力。 仿真结果表明,在系统模型失配或加入干扰信号的情况下,本文提出的LM-PSO-BP预测控制方法表现出良好的抗干扰性,具有较好的综合性能。 6结论 针对非线性系统,提出了一种基于BP神经网络和LM-PSO算法的新型预测控制方法。该方法中,以BP神经网络建立非线性对象预测模型,利用LM-PSO算法进行滚动优化求解目标性能函数,得出最优控制量后进行反馈校正。利用PSO算法操作简单,需调参数较少等优点,先得出一个最优解,并以此作为LM算法的初始值,解决了LM算法依赖初值的问题;并结合LM算法的快速收敛性,提高了全局寻优能力。通过对非线性系统的仿真研究,验证了该预测控制方法具有较好的控制性能,可有效应用于非线性系统中。 参考文献: [1]席裕庚.预测控制:第2版[M].北京:国防工业出版社,2013:130-134. [2]LEEJH.Modelpredictivecontrol:reviewofthethreedecadesofdevelopment[J].InternationalJournalofControl,AutomationandSystems,2011,9(3):415-424. [3]李妍,毛志忠,王琰,等.基于多面体终端域的Hammerstein-Wiener非线性预测控制[J].自动化学报,2011,37(5):629-638. [4]吴德会.非线性动态西东的Wiener神经网络辨识法[J].控制理论与应用,2009,26(11):1192-1196. [5]靳起兵,杨瑞赓,王珠,等.一类统一非线性的Hammerstein模型辨识方法研究[J].系统仿真学报,2011,26(12):2887-2891. [6]LUCH.Waveletfuzzyneuralnetworksforidentificationandpredictivecontrolofdynamicsystems[J].IEEETransIndElectron,2011,58(7):3046-3058. [7]李松,刘力军,解永乐.遗传算法优化BP神经网络的短时交通流混沌预测[J].控制与决策,2011,26(10):1581-1585. [8]ZHENGPengyuan,XIYugeng,LIDewei.Closed-looprobustmodelpredictivecontrolfortime-delaysystemswithstructureduncertaines[J].ControlTheory&Applications,2013,30(6):683-692. [9]NANDK,SINGHSP.SimulatedresponseofNNbasedidentificationandpredictivecontrolofhydroplant[J].ExpertsystemswithApplication,2007,32(1):233-244. [10]王钰,郭其一,李维刚.基于改进BP神经网络的预测模型及其应用[J].计算机测量与控制,2005,13(1):39-42. [11]韩敏,穆大芸.回声状态网络LM算法及其混沌时间序列预测[J].控制与决策,2011,26(10):1469-1478. [12]KALLAPURAG,BOYSONTK,PETERSENIR,etal.Nonlinearestimationofring-downtimeforaFabry-Perotopticalcavity[J].OpticalSocietyofAmerica,2011,19(7):6377-6386. [13]樊兆峰,马小平,邵晓根.非线性系统RBF神经网络多步预测控制[J].控制与决策,2014,29(7):1274-1278. [14]HOSSEINM.Long-termpredivtionofchaotictimeserieswithmulti-steppredictionhorizonsbyaneuralnetworkwithLevenberg-Marquardtlearningalgorithm[J].Chaos,SolitonsandFractals,2009,41(2009):1975-1979. [15]HASHEMISM,REZAPOURM,MORADIA.AneffectivehybridPSO-basedalgorithmforplanningUMTSterrestrialaccessnetworks[J].TaylorandFrancisLtd,2010,42(3):241-251. (编辑:刘笑达) Nonlinear Predictive Control Based on LM-PSO Algorithm and BP Neural Network WANG Bingxuan,LI Guoyong,WANG Yanhui (CollegeofInformationEngineering,TaiyuanUniversityofTechnology,Taiyuan030024,China) Abstract:In this paper, a multistep predictive control method for nonlinear systems was proposed, which uses a Back Propagation(BP) neural network as a model. First,a multi-step predictive model based on BP neural network was constructed and applied to predict the output of the system. Then the optimal control values were obtained by the rolling LM-PSO optimization algorithm, which was combined with Levenberg-Marquardt(LM) algorithm and Particle Swarm Optimization(PSO) algorithm. Feedback correction was achieved by modifying reference input according to the error. The PSO algorithm was introduced into the LM algorithm to overcome the limitation of initial value, enhance the ability of escaping from local optima and improve the speed and precision of the solution. This method can be used to design effective predictive controllers for univariate nonlinear systems with uncertain mathematical models. The simulation results demonstrated the self-adaptive ability, robustness and efficiency of the proposed method. Key words:nonlinear system;predictive control;Levenberg-Marquardt algorithm;particle swarm optimization algorithm;back propagation neural network 文章编号:1007-9432(2016)02-0207-05 *收稿日期:2015-09-30 基金项目:国家自然科学基金资助项目:改善电液伺服系统动态特性的双自由度回路原理及控制方法(51075291) 作者简介:王炳萱(1990-),女,太原人,硕士生,主要从事预测控制、智能控制理论及其应用研究,(E-mail)wangbingxuan0503@163.com通讯作者:李国勇,教授,主要从事预测控制、故障诊断和智能控制理论与应用等研究,(E-mail)tygdlgy@163.com 中图分类号:TP273 文献标识码:A DOI:10.16355/j.cnki.issn1007-9432tyut.2016.02.016