基于陀螺仪的穿刺手术导航系统设计
2016-06-17方路平徐仙明
方路平,高 坤,潘 清,曹 平,徐仙明
(1.浙江工业大学 信息工程学院,浙江 杭州 310023;2. 浙江工业大学 之江学院,浙江 杭州 310024)
基于陀螺仪的穿刺手术导航系统设计
方路平1,高坤1,潘清1,曹平2,徐仙明1
(1.浙江工业大学 信息工程学院,浙江 杭州 310023;2. 浙江工业大学 之江学院,浙江 杭州 310024)
摘要:现有的颅内穿刺手术导航系统价格昂贵,使用范围受限,外科医生在操作上存在一定困难.为此设计了一种基于陀螺仪的低成本颅内血肿穿刺手术导航系统.系统基于病人术前的医学影像数据设置基准点、靶点和穿刺进入点,建立基准参考平面,通过计算机处理得到穿刺进入点和靶点之间组成的穿刺路径信息.在手术过程中,采用陀螺仪姿态解算技术,实时获取手术器械在空间中的姿态,与穿刺路径信息进行匹配,辅助医生实施手术.基于模型的实验结果表明:该系统定位精度满足颅内穿刺手术导航要求,能够应用在血肿较大的穿刺手术中,并且操作简单,构建成本低.
关键词:手术导航;图像可视化;姿态解算;标记点注册;陀螺仪
由高血压、脑外伤等因素引起的颅内血管破裂可导致血液集聚于脑内或者脑与颅骨之间,对脑组织产生压迫,形成颅内血肿,具有致死率和致残率较高的特点[1-2].对于出血量大于30 cm3的患者,必须及时进行手术治疗.颅内穿刺手术是治疗颅内血肿的有效手术方法之一[3],但对医生经验要求极高,往往需要在手术导航系统的辅助下进行[4-5].传统的手术导航系统基于光学或电磁导航技术,具有很高的精度,但价格昂贵、使用复杂,因而大多集中于中心城市的大医院[6].鉴于颅内出血具有发病急、病情发展快的特点,对于基层的颅内出血患者,迫切需要引入低成本、易操作的颅内穿刺手术导航系统对其提供快速、有效的治疗.
近年来,陀螺仪技术被引入神经外科手术导航领域.由于陀螺仪具有定向的功能,因而能够辅助一些需要准确定向的外科手术.Jost等借助iPod Touch自带的陀螺仪辅助了椎弓根钉植入手术[7].在陀螺仪的辅助下,20根椎弓根钉中的16根准确植入了在3度误差的理想轨迹内,表明低成本的陀螺仪能够帮助一些神经外科手术提高成功率.本研究将这一技术应用于颅内穿刺手术,设计了基于陀螺仪的颅内血肿穿刺手术导航系统.该系统首先读取病人头颅扫描图像,确定病灶位置;随后,进行手术规划,通过计算机处理得到手术进入点与病灶点之间的手术路径信息;最后借助陀螺仪技术,实时获取手术器械在空间中的姿态,与手术规划得到的路径信息进行实时匹配,辅助医生实施手术.在实现了穿刺手术导航系统后,本研究基于泡沫塑料头颅模型对导航系统的有效性进行了验证.
1系统构成
手术导航系统的整体结构如图1所示,包括图像读取与可视化模块、穿刺规划模块和穿刺导航模块.图像读取与可视化模块实现了DICOM(Digital imaging and communications in medicine)文件序列解析并可视化的功能.穿刺规划模块中,在可视化窗口内注册标记点,系统计算靶点和进入点组成的穿刺路径的长度及其与基准参考平面之间的夹角,以辅助医生确定穿刺针进入头颅的角度和深度.穿刺导航模块用以对比导航设备上传的实时角度信息和系统基于图像所计算的计划穿刺角度信息,指导医生进行手术,同时根据接收的数据提示调整手术器械姿态.
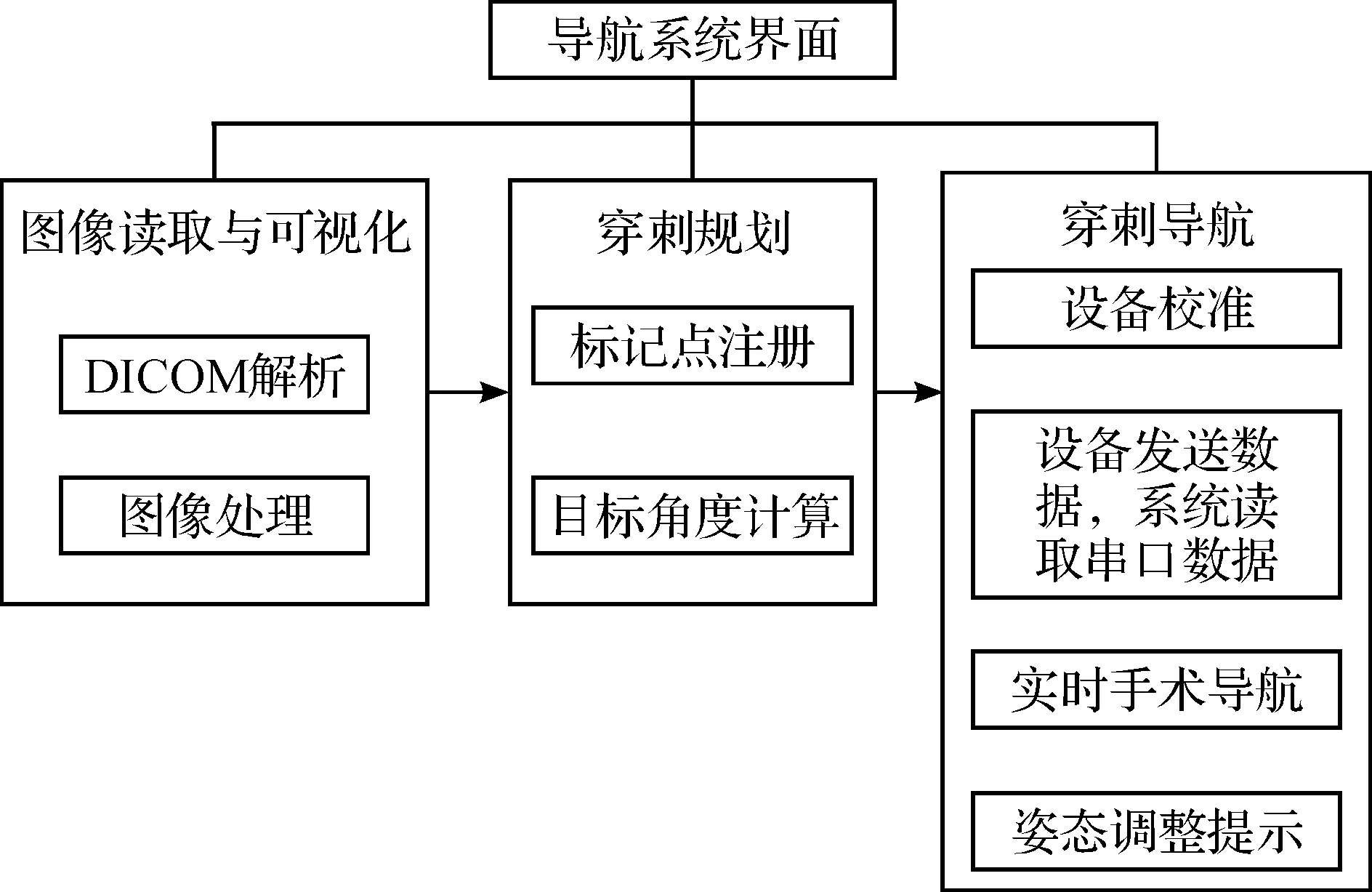
图1 手术导航系统结构图Fig.1 Surgical navigation system schematic diagram
2系统模块设计
2.1图像读取与可视化模块
系统中,图像读取功能由Insight segmentation and registration toolkit(ITK)库实现,它提供完整的读取DICOM图像的方法,包括读取二维序列图片并存储为体数据等方法.图像的可视化处理利用Visualization Toolkit(VTK)完成,它是一套进行数据可视化的通用开发工具包,提供用于三维计算机图像、图像处理及可视化的开放源码的软件类库[8-10],图像读取与可视化流程如图2所示.
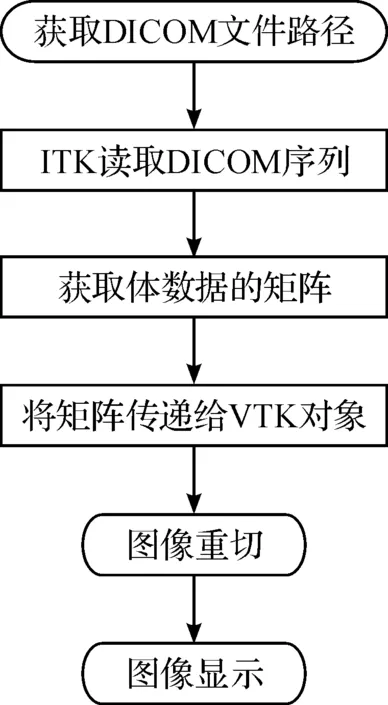
图2 图像读取与处理流程Fig.2 Image scanning and processing flow chart
2.2穿刺规划模块
图像读取并且可视化后,进入穿刺规划模块.此模块的功能主要包括标记点注册、设置靶点和进入点、计算穿刺到目标点需要的数据.研究中利用泡沫头颅模型模拟病人头部,基于此模型验证计算的数据的有效性以及系统的有效性.
2.2.1标记点注册
标记点注册是指将术前输入电脑的影像资料与术中实际的解剖结构匹配的过程.在研究中,采用在泡沫头颅模型上粘贴高亮标记物的方法进行标记点注册.高亮标记物在头颅表面或内部可用肉眼观察到,在CT或MRI扫描得到的图像中呈现容易辨识的高亮信号,由此可将扫描图像与真实解剖结构进行匹配,实现注册过程.选用维生素E胶囊作为MRI成像的高亮标记物,胶囊为椭圆形,尺寸为1.5 cm×1 cm.用作参考点的胶囊粘贴在模型的左、右外耳道,鼻尖,头顶纵轴线等处,用于生成参考坐标系.在实验模型内部放置胶囊,模拟病灶点,在模型表面放置胶囊,模拟穿刺入口点.胶囊粘贴位置如图3所示.
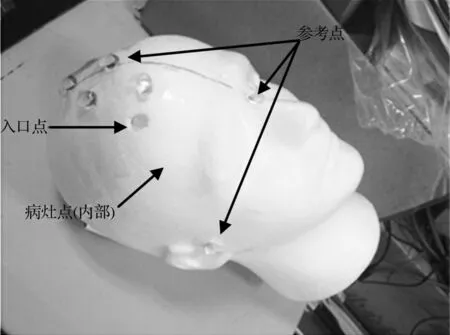
图3 标记物粘贴示意图Fig.3 Paste markers schematic diagram
经过MRI(0.35 T)扫描后,使用图像读取与可视化模块读取、显示图像.使用标记点注册模块将实际标记物与图像上的亮点一一对应注册.注册标记点后,系统自动生成参考坐标系,如图4所示.

图4 注册标记点与参考坐标系生成Fig.4 Register marker and generate the reference coordinate system
标记点注册后,把标记点的坐标值、名称等信息存储在字典数据结构中.根据存储在字典中的参考点,系统在空间配准[11]后建立参考坐标系,基于该坐标系计算出目标角度等穿刺信息.
2.2.2目标角度计算
目标角度是指手术器械要抵达病灶点所需摆放的姿态值,包括穿刺航向角(yaw)、穿刺俯仰角(pitch).航向角和俯仰角的定义如图5所示.在空间直角坐标系OXYZ中,A点是空间中的任意一点,B点是A点在XOZ面上的投影点.定义yaw是B点与X轴正向的夹角,pitch是A点与Y正向夹角的余角.
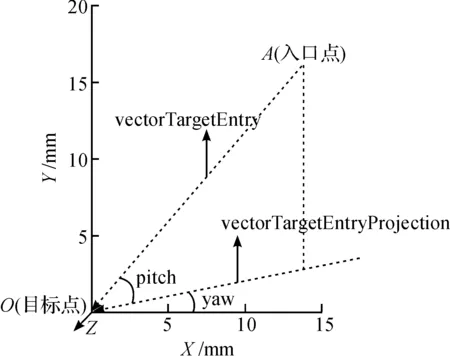
图5 yaw,pitch定义图Fig.5 Definition of yaw and pitch
在目标角度计算中,假设坐标原点是空间目标点target,A点是入口点entry,目标点target与入口点entry组成的向量vectorTargetEntry及其在XOZ面上投影的向量vectorTargetEntryProjection分别为
vectorTargetEntry=(target[0]-entry[0],
target[1]-entry[1],target[2]-entry[2])
(1)
vectorTargetEntryProjection=(target[0]
-entry[0],0,target[2]-entry[2])
(2)
计算yaw,pitch值的函数为
cosYaw=dot(vectorTargetEntryProjection,(1,0,0))/
norm(vectorTargetEntryProjection)
(3)
cosPitch=dot(vectorTargetEntry,(0,1,0))/
norm(vectorTargetEntry)
(4)
yaw=180-arccos(cosYaw)
(5)
pitch=90-arccos(cosPitch)
(6)
式中:dot(),norm()分别为求向量的数量积、向量模的函数.通过式(1~6)可得到在所建立的参考坐标系下的目标穿刺角度值.系统计算出穿刺路径信息yaw,pitch的值,如图6所示.
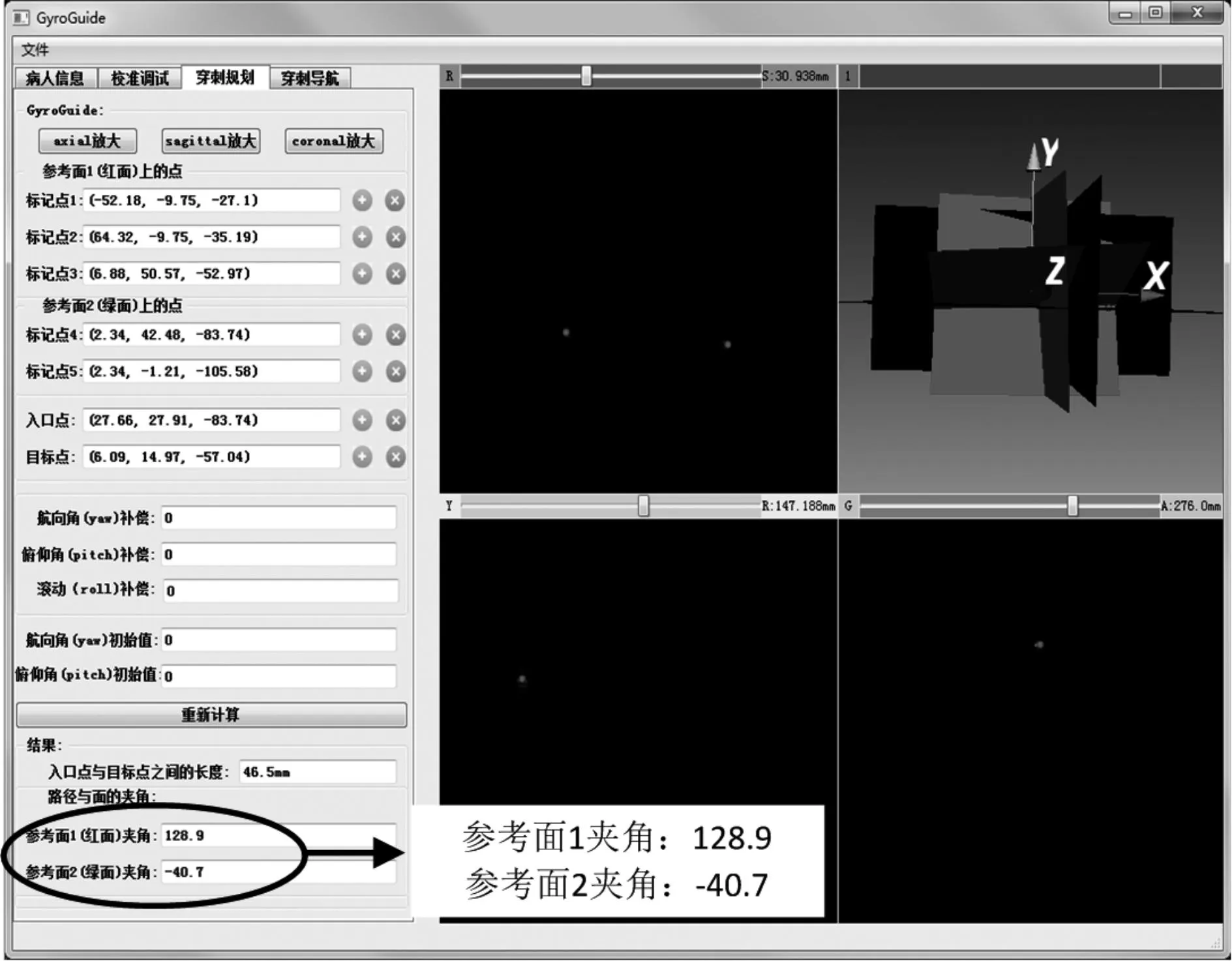
图6 计算穿刺角度Fig.6 Calculation of puncture trajectory
在实际应用中,所建立的参考坐标系与地面坐标系存在一定的夹角,需通过角度修正数据yaw′,pitch′进行修正,得到最终穿刺角度.在头部纵轴线与地面垂直后,测量头部的初始姿态值作为角度修正数据.首先将陀螺仪与头颅纵轴线比对,当两者平行时,读取陀螺仪yaw值读数,作为头部的初始yaw值即yaw′.通过手机app拍摄基准面与地面夹角得到初始pitch值即pitch′,如图7所示,图7(a)展示了测量yaw′的值的方法,图7(b)展示了测量pitch′的值的方法.
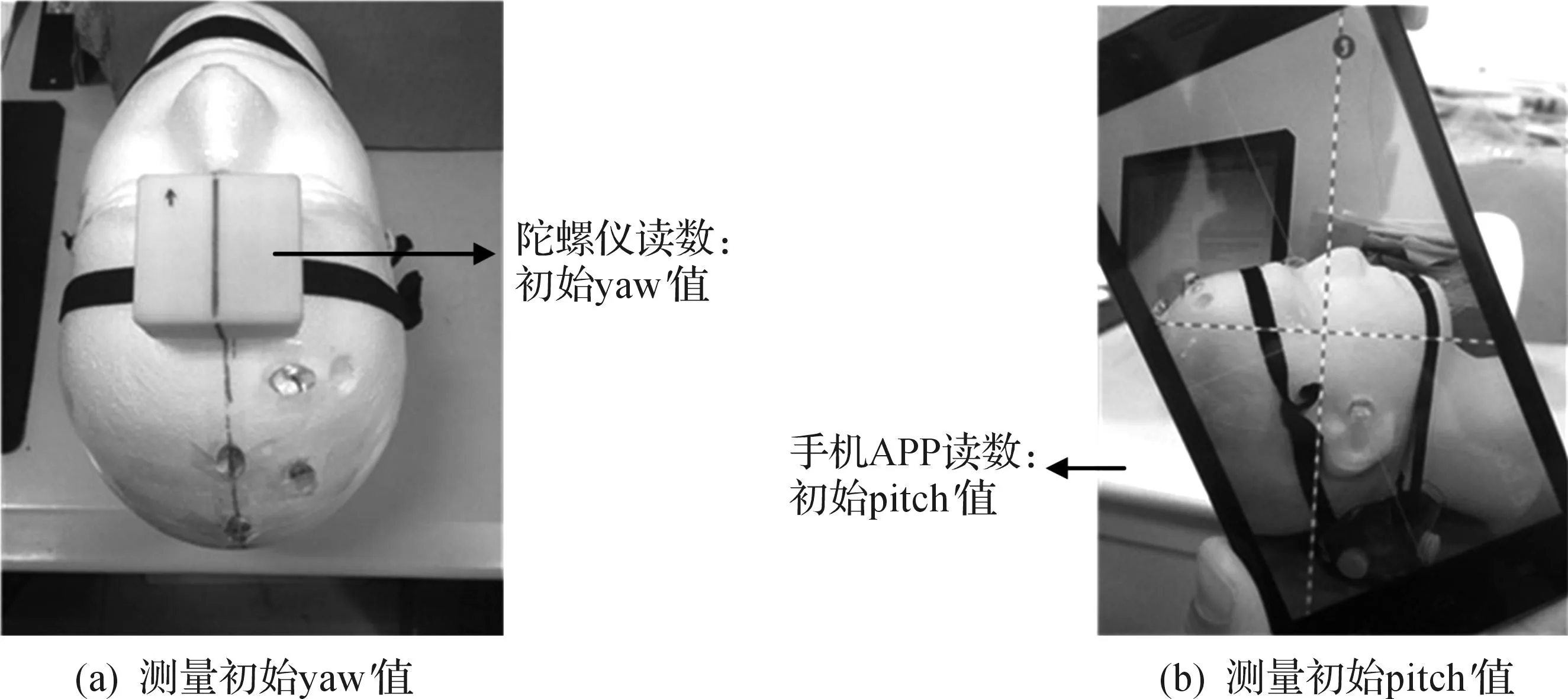
图7 测量初始姿态值Fig.7 Measurement of initial attitude
最终的穿刺导航角度是yaw与yaw′,pitch与pitch′的融合,公式为
yaw_3=yaw+yaw′-180
(7)
pitch_3=pitch+pitch′-90
(8)
2.3穿刺导航模块
研究中使用陀螺仪确定手术器械的姿态.系统选择了四元数算法解算姿态.在姿态解算过程中,采用卡尔曼滤波算法[12]对原始数据进行滤波.基于陀螺仪的导航设备通过蓝牙把解算得到的姿态值发送到计算机,计算机根据读取值实时虚拟显示当前手术器械的姿态,医生根据目标姿态值调整手术器械姿态.当穿刺角度匹配时,手术规划路径与实时的路径重合,医生可基于此路径实施穿刺手术,如图8所示.
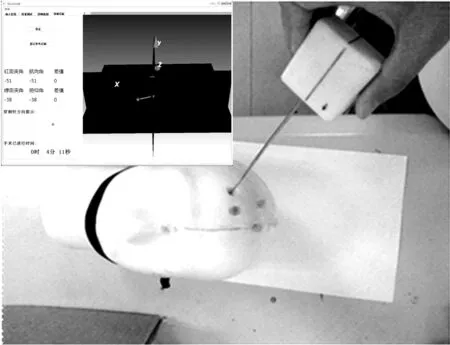
图8 穿刺导航Fig.8 Puncture navigation
3结果
选用泡沫头颅模型模拟了穿刺手术,实验流程:1) 在泡沫头颅表面粘贴高亮标记物,对泡沫头颅进行MRI扫描;2) 系统导入扫描图像,基于图像注册标记点,建立头颅坐标系,计算该坐标系中的穿刺角度;3) 借助陀螺仪、手机等工具得到头颅在地面坐标系中的姿态值;4) 融合2),3)步的结果,得到在地面坐标系中的穿刺角度,实施手术.
实验过程中使用了两个头颅模型,在每个头颅模型上测试了3条不同的穿刺路径,以验证系统的有效性.实验结果分析如表1所示,目标值由手术导航系统计算得到,实际值是穿刺针从头颅表面入口点进入到目标点的值,角度差是实际值与目标值在航向和俯仰角度上的差值.实验中,穿刺针进入颅内的长度为60 mm,在此定长下,穿刺针偏离靶点的误差的计算式为
l=nπr/180
式中:r为半径;n为偏差角度数.
表1穿刺角度值对比及精度分析
Table 1The comparison of puncture angle accuracy using different method and accuracy analysis
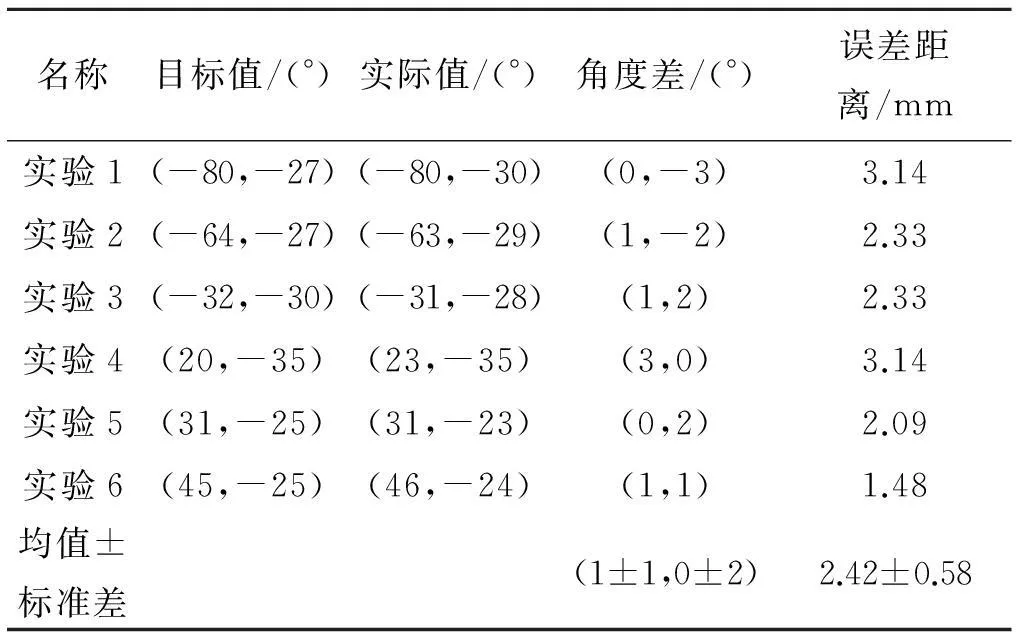
名称目标值/(°)实际值/(°)角度差/(°)误差距离/mm实验1(-80,-27)(-80,-30)(0,-3)3.14实验2(-64,-27)(-63,-29)(1,-2)2.33实验3(-32,-30)(-31,-28)(1,2)2.33实验4(20,-35)(23,-35)(3,0)3.14实验5(31,-25)(31,-23)(0,2)2.09实验6(45,-25)(46,-24)(1,1)1.48均值±标准差(1±1,0±2)2.42±0.58
从表1中可以看出:穿刺针碰触到头颅内病灶点时的实际姿态值与系统计算的目标角度之间在航向和俯仰方向上的误差分别为1°±1°,0°±2°,最大差值均为3°.在60 mm的穿刺深度情况下,误差距离为(2.42±0.58) mm,最大误差距离为3.14 mm.
通过对比穿刺误差与血肿的大小验证系统清除血肿的可行性.根据颅脑创伤外科治疗指南[13],当血肿体积大于30 cm3,血肿厚度大于2 cm时都应该手术清除血肿.一般假设血肿为椭球状,其椭球参数的计算方法称为ABC方法[13],该方法估算血肿体积为
Ve≈ABC/2
(9)
式中:A为测量层面最大直径;B为测量垂直于A的最大直径;C为厚度为10mm的层数;Ve为血肿体积.手术靶点一般选择在血肿面积最大的层面上,在血肿最大层面做近似椭圆的计算,设血肿体积为30cm3,椭圆的离心率为大于0.5且小于0.9的值,C=3,计算结果如表2所示.

表2 血肿尺寸估算表
由表2可知:对于体积为30 cm3的血肿,其最大层面短半径的最小值为14.75 mm,远大于导航系统误差均值2.42 mm和误差最大值3.14 mm.由此可见:在误差允许范围内,系统能够有效辅助清除颅内血肿.
误差来源主要有两方面:一是导航设备的精度限制,设备在实时的数据采集和传输过程中存在噪声,采用卡尔曼滤波并不能完全消除噪声,导致陀螺仪输出值的精度有限;二是目标姿态求解过程中,对修正角度值的测量,该角度使用手机软件拍摄获得,拍摄时的抖动,拍摄角度的变化都会影响所测的值.为减少抖动影响,可使用机械臂代替人的手臂测量修正角度值,可有效减小抖动影响.此外,系统不需要专业的测量工具,选用容易获得的手机作为测量工具,有助于普及推广.
4结论
颅内血肿需要急救治疗,以减少并发症,改善病人预后.而基层医院由于缺乏颅内出血手术治疗经验的医生,且无力购买价格昂贵的手术导航设备,因而无法对颅内出血病人开展有效的治疗.针对该问题,研究设计了一个基于低成本陀螺仪的穿刺手术导航系统.系统以CT,MRI等医学影像数据为基础,借助基于陀螺仪的定位设备定位手术器械,跟踪显示手术器械和病灶的空间位置关系,辅助实施手术.实验结果表明:该系统具有良好的精度,能够适用于清除高血压、脑外伤等引起的颅内出血.
参考文献:
[1]BUTCHER K, LAIDLAW J. Current intraccrebral hemorrhage management[J]. Clin neurosci,2003,10(2):158-167.
[2]王建清,陈衡城,吴劲松,等.高血压脑出血手术时机的规范化研究[J].中国微侵袭神经外科杂志,2003,8(1):21-24.
[3]庞采明,梁裕盛.微创治疗高血压脑出血的发展现状[J].中国实用神经疾病杂志,2013,16(1):72-73.
[4]FRANK C, IRWAN K, CHARLES L, et al. Image-guided robotic neurosurgery: an in vitro and in vivo point accuracy evaluation experimental study[J]. Surgical neurology,2009,71(6):640-647.
[5]骆文博,王广志,丁海曙.计算机辅助手术系统[J].国外医学生物医学工程分册,2001,24(6):241-247.
[6]赵帆,陈衔城,吴劲松.我国神经导航手术开展现状的调查[J].中国医疗器械信息,2007,13(1):6-11.
[7]JOST G F, BISSON E F, SCHMIDT M H. iPod touch-assisted instrumentation of the spine: a technical report[J]. Neurosurgery,2014,75(6):36-37.
[8]YOO T S, METAXAS D N. Open science-combing open data and open source software: medical image analysis with the Insight Toolkit[J]. Medical image analysis,2005,9(6):503-506.
[9]WILLIAM J S, KENNETH M M, LISA S A, et al. The VTK users guide[M]. New York: Kitware,2000.
[10]郝玮琳,杜建军,刘有军.基于 ITK、VTK 的 DICOM 图像的显示及信息提取[J].北京生物医学工程,2008,27(2):151-155.
[11]EGGERT D W, LORUSSO A, FISHER R B. Estimating 3-D rigid body transformations: a comparison of four major algorithms[J]. Machine vision and applications,1997,9(5):272-290.
[12]陈晨,赵文宏,徐慧鑫,等.基于卡尔曼滤波的MEMS陀螺仪漂移补偿[J].机电工程,2013,30(3):311-313.
[13]美国颅脑外伤基金会,美国神经外科医师协会.颅脑创伤外科治疗指南[M].刘伟国,译.北京:人民军医出版社,2008.
(责任编辑:陈石平)
Design of puncture surgical navigation system based on gyroscope
FANG Luping1, GAO Kun1, PAN Qing1, CAO Ping2, XU Xianming1
(1. College of Information Engineering, Zhejiang University of Technology, Hangzhou 310023, China;2. Zhijiang College, Zhejiang University of Technology, Hangzhou 310024, China)
Abstract:Existing intracranial puncture surgical navigation systems are expensive and have limited applications. There are also some difficulties for surgeons in the operation According to these issues, an inexpensive puncture surgical navigation system for intracranial hematoma is designed based on gyroscope. The reference points, entry point and target point are selected to build reference planes based on the patient’s preoperative medical image and the puncture path information between the entry point and target point can be calculated through computer. Gyro attitude solution was applied to get real-time surgical instrument space gesture which is matched to the target path in order to assist the surgeon in the surgery. Experimental results show that the positioning accuracy of system can satisfy the requirements of intracranial puncture surgical navigation with high reliability and low-cost.
Keywords:surgical navigation; image visualization; attitude solution; register marker; gyroscope
收稿日期:2015-11-13
基金项目:浙江省公益技术应用研究计划项目(2015C33193)
作者简介:方路平(1974—),男,浙江杭州人,教授,研究方向为多模态医学图像分析处理、基于医学图像的手术导航、云计算技术及其应用等,E-mail: flp@zjut.edu.cn.
中图分类号:TP391.7
文献标志码:A
文章编号:1006-4303(2016)02-0129-05
