无刷直流电机参考模型自适应控制系统研究
2016-06-08刘光亚
刘光亚, 闵 杰
(湖北工业大学电气与电子工程学院, 湖北 武汉 430068)
无刷直流电机参考模型自适应控制系统研究
刘光亚, 闵杰
(湖北工业大学电气与电子工程学院, 湖北 武汉 430068)
[摘要]通过对参考模型自适应控制的研究,采用popov理论设计参数辨识自适应律,最后设定辨识转动惯量自适应PI调节器,实现给定速度的自适应跟踪。通过与模糊自适应PI控制控制器相比较,通过实验仿真表明模型参考自适应控制系统对外界负载变化具有较强的适应性和抗干扰能力。
[关键词]无刷直流电机; 参考模型自适应; 转动惯量
无刷直流电机采用电子换相器取代机械换相,具有功率密度大、起动力矩大,高功率因数,效率高和使用寿命长等特性。因其具有简单的结构、较高的可靠性和优良的调速性能,已经被广泛应用于家用电子、仪器仪表、航空航天等生产和生活领域。
在实际应用中,人们常把直流无刷电机控制系统看作是一个线性定常系统,常常忽略未知负载、外界扰动、摩擦及磁场非线性对其产生的影响。但因自身和环境的多变性,该系统是非线性且多变量的。传统PID控制对工况的变化适应性差,通常需要在对应现场环境人为地不断整定,以确定Kp、Ki、Kd参数,不能随系统实时改变。因此,降低了其控制系统的鲁棒性、可扩展性和自适应能力,无法满足控制要求。随着微处理器技术的快速发展,人们利用各种智能控制理论,将调整经验作为控制思想存入控制器中,对PI参数自动进行整定。其中,模糊自适应PI控制得到广泛应用,它结合了两种控制策略,直接从控制效果出发,根据采集的模糊输入信号,经过模糊推理,以模糊控制的输出对PI控制器的参数进行在线自整定,忽略系统模型参数变化影响。但是,BLDCM是一个非线性多变量耦合系统,尤其是作为伺服电机应用时,对其控制性能提出很高要求。本文采用另一种方法,通过对模型参考自适应控制的研究,具体实现辨识的转动惯量PI调节器设计,自适应跟踪给定速度,对干扰或噪声具有极强的抑制功能,更适合伺服电机实际应用,且具有良好的动静态响应[1-3]。
1直流无刷电机数学模型
无刷直流电机定子绕组采用集中绕组,定子绕组感应电动势为梯形波,不能进行d-p变换。本文取比较普遍的无刷直流电机为例,三相定子绕组为完全对称的星形接法,控制策略为两两导通六状态。为研究其运动特性,分析其电机模型[4]。为了简化数学模型,做如下假设:1)定子绕组均匀分布在电机齿槽内,忽略齿槽效应引起的转矩脉动;2)不计铁芯磁滞损耗、祸流损耗和磁饱和;3)转子是永磁材料,无阻尼作用;4)电机气隙磁场趋近于梯形分布,平顶宽度120°电角度。
根据电磁理论和基尔霍夫第二定律,得无刷直流电机三相电压平衡方程式为:
(1)
式中ua、ub、uc为无刷直流电机三相定子绕组相电压,ia、ib、ic为定子绕组相电流,ea、eb、ec为三相定子绕组产生的反电势。因为定子绕组对称,所以三相定子绕组电阻Ra、Rb、Rc相等为R。同理可知,各相绕组电感为L,各相自感互感为M。
其机械运动方程的表达式为
(2)
式中: Te和TL为电磁转矩和负载转矩,J为转动惯量,B为阻尼系数。
2基于模糊自适应PI控制
模糊控制不依赖于无刷直流电机的数学模型,而是通过将人们在大量的生产实践过程中积累起来的技术知识和操作经验进行精确描述,运用模糊控制的基本方法,对控制效果进行调节[5-8]。通过将应用广泛的经典PI控制和自适应能力强的模糊控制器结合一起,构成速度环节上的调节器,将各种信号量和评价指标进行定量表示,实现PI参数的最佳调整,其系统结构见图1。

图 1 BLDCM 模糊PI控制系统结构
速度环模糊PI自适应控制器设计流程如下。
2.1确定输入信号
2.2模糊化处理
对采集的转速差e和偏差ec信号进行模糊化处理,将输入信号准确值分别转化为模糊集,系统输入信号均采用三角形隶属度函数进行模糊化处理,e 和ec模糊集论域均设为[-3,3]。
2.3模糊推理
模糊控制规则的选取是模糊控制器设计的重要组成部分,通过模块FIS编辑设置,根据建立的模糊规则库和数据库,对输入的模糊量进行处理,规则的数量跟模糊子集有关,生成相应的控制输入量和控制策略,从而完成模糊推理和计算,求解模糊控制输出量。根据经验设计以下模糊规则:
1)当e较大,对应模糊输出比例增量ΔKp取较大的值,以符合控制系统的快速响应要求;而积分增量ΔKi加以限制或取0,以防止积分环节过饱和状态,避免出现超调现象。
2)当e和ec中等大时,且同号是朝着给定转速相反变化,模糊控制输出信号ΔKp取负值,阻碍其变化,反之取正值。ΔKi要取适中,防止系统不稳定,同时也要确保系统响应速度性能,朝着给定速度变化。
3)当e较小时,表明电机转速偏差较小,ΔKp和ΔKi取较大值,减小系统达到稳态的调节时间和保证稳态响应。
4)当偏差率ec越大,说明电机要达到额定速度,ΔKp的取值越小,防止出现转速偏差。ΔKi的取值越大,系统的静态误差值也就越小,因而增强了调节精度。
2.4去模糊化处理
通过模糊判决将模糊控制器输出的模糊集转化为电机控制器能接受精确的确定量。为了取得精确的输出Kp、Ki增量,Δkp、Δki模糊集论域设为[-8, 8]。本文解模糊方法采用重心法,即
得到比例增益和积分增益对应的修正参数:
(3)
式中Kp0、Ki0为PI调节器的初始化参数,Δkp、ΔKi为模糊控制器精确输出量。
在设计控制器的时候采用适中的原则,既要使控制精度比较高,又要使模糊推理运算不过于繁琐以至于造成系统的延迟,影响系统的响应。信号取值越多反而造成实际调试越困难,使得所采用的模糊规则越发复杂,控制器的实时性也越差。为减小系统复杂性和变量维数,可以不对微分增益处理。本文所有输入变量信号e、ec和输出变量信号ΔKp、ΔKi的模糊集,均设定为{NB, NM,NS, ZO, PS, PM, PB}七个等级,控制器输出信号Δkp、Δki模糊化过程均服从三角形分布。
3基于参考模型自适应转动惯量辨识的自适应PI控制
在实际应用中温度变化、负载脉动等,造成了实际电机控制参数发生变化,而控制器还是按照理想参数进行控制,造成系统抗干扰能力差、控制精度低。
为了使系统具有更好的性能,减小外界因素对控制器的影响。基于被控对象数学模型的参数辨识,本文设计了一种自提交PI控制器。该控制器根据实际BLDCM调速系统作为参考模型,以转动惯量参数未知为可调模型,采用自适应规律使两个模型的误差值为零,达到转动惯量识别的目的。可以随着转动惯量的变化而自调整PI参数以适应变化后的系统模型,以满足系统的鲁棒性和自适应性要求[9-10]。
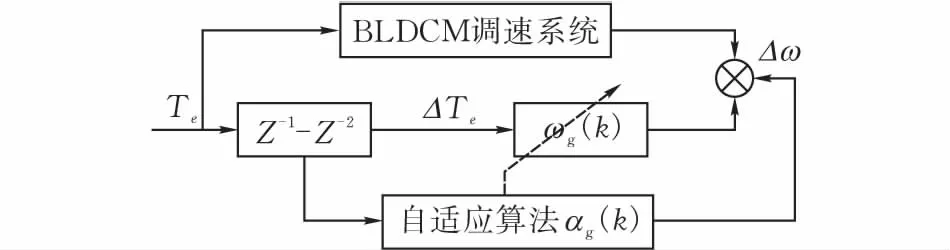
图 2 基于参考模型的转动惯量辨识系统结构图
将机械运动方程(2)离散化为:
Te(t-1)-Tl(t-1)-Bω(t-1)=
(4)
由于在一个很小的采样周期T里,负载转矩变化可以近似不变,即Tl(t-1)=Tl(t-2),消去负载转矩,可得
ωm(k)=2ωm(k-1)-ωm(k-2)+
(5)
可以将式(5)作为关于转动惯量的参考模型
ωm(k)=2ωm(k-1)-ωm(k-2)+aΔTe(k-1)
(6)
其中a=T/J,ΔTe(k-1)=Te(k-1)-Te(k-2)。
可调模型方程
ωg(k)=2ωm(k-1)-ωm(k-2)+agΔTe(k-1)
(7)

根据popov理论推导得到转动惯量自适应律为
(8)
其中β为反馈通道增益系数,Δωm(k)为电机单位采样周期的转速增加量。
根据经典控制理论可知[11],速度PI参数中的比例增益Kp,积分增益Ki与转动惯量和永磁体磁通具有线性关系,设A、B为比例系数。因此通过实时识别转动惯量,可以自适应调整速度环PI参数,可以在负载变化时,识别转动惯量,设置比例增益、积分增益。使无刷直流电机控制系统仍具有较强的抗干扰能力。
Kp=A(J/ψ), Ki=B(J/ψ)
(9)
4仿真实验与结论
在计算机仿真软件建立电机控制系统模型,分别进行自适应PI控制实验,选取电机参数如下:额定电压为220 V;额定转矩3 N·m;额定转速为2000 r/min;转动惯量为0.005 kg·m2;定子绕组反电势常数为0.5;绕组电阻为1 Ω;绕组电感为0.02 H,转速、转矩仿真曲线见图3、图4。

(a)转速波形

(b)转矩波形图 3 模糊自适应PI控制仿真实验波形
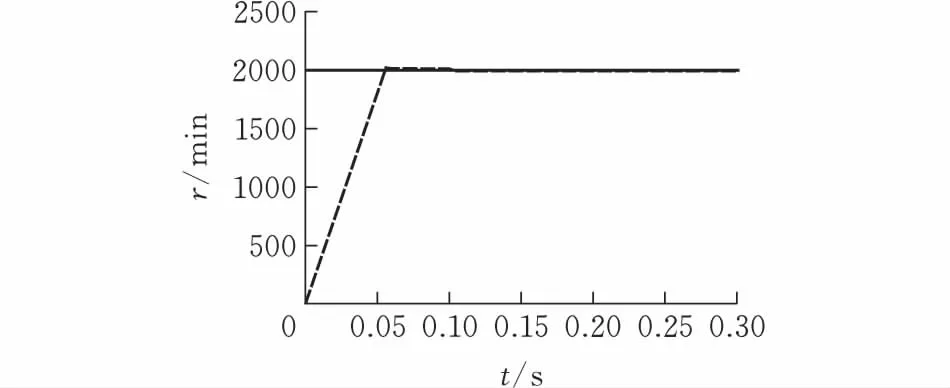
(a)转速波形
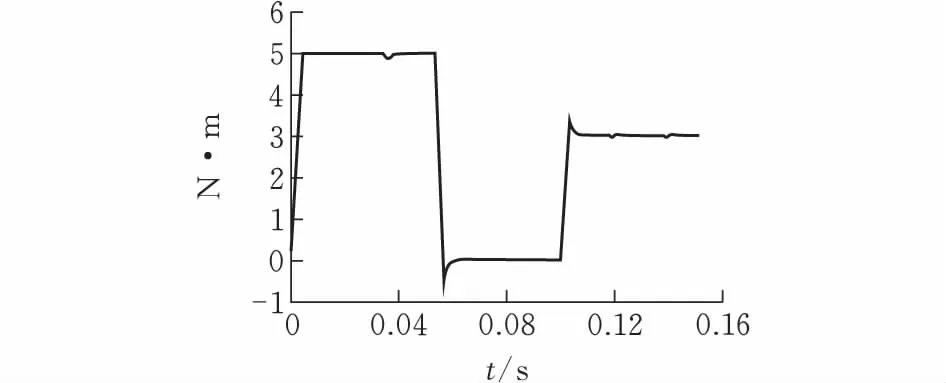
(b)转矩波形图 4 模型参考自适应转动自适应PI控制仿真实验波形
为了验证本文设计负载扰动的自适应性,电机空载启动,在0.1 s达到额定转速后,加上额定负载3 N·m。观察两种控制算法下的输出波形情况如下:
从仿真曲线图3可以明显看出:基于模糊自适应PI控制的无刷直流电机控制算法,在电机启动时,转速曲线有超调现象。并在0.1 s加载额定转矩时,转速有明显的下降,且转矩波形有明显扰动。但当电机达到稳定状态时,转速能达到额定转速,无静差,稳态响应良好。从仿真曲线(图4)可以看出:基于模型参考自适应转动惯量辨识的自适应PI控制法,在启动过程中转速无超调,并很快达到额定转速。在0.1 s加额定负载时,转速波动小,能迅速到达稳定状态,变化平滑。转矩在启动、负载变化时,波动小,实验表明其有良好的动静态特性,抗干扰能力强。
仿真结果表明,本文基于模型参考自适应PI控制方案,使PI参数与扰动量联系在一起。当负载存在扰动时,其启动性能、抗干扰性能均明显优于模糊自适应PID控制,能成功的快速跟踪系统参数,达到PI参数实时调整效果。总而言之,后者增强了系统的稳定性,减小了系统波动,更适合应用于负载不稳定情况,可进一步研究电机其他参数对控制器的影响。
[参考文献]
[1]Hwang C C, Li P L, Liu C T, et al. Design and analysis of a brushless DC motor for applications in robotics[J]. IET electric power applications, 2012, 6(7): 385-389.
[2]Meza J L. Santibanez V Soto R,et al. Fuzzy Self-Tuning PID Semiglobal Regulator for Robot Manipulators[J]. IEEE trans. on Industrial Electronics,2012, 59 (6): 2709-2717.
[3]李斌.唐永哲.模糊PID算法在无刷直流电机控制系统中的应用[J]. 微电机,2006(2):14-15.
[4]李实求,郝帅,马旭, 等.无刷直流电机双闭环模糊自适应控制方法研究[J].电气传动,2012,42(7):61 -63.
[5]贝文诚,钟晓兵,李文.模糊控制在无刷直流电机转速控制中的应用册[J].中国计量.2002(9):37-38.
[6]夏长亮, 李正军, 杨荣等. 基于自抗扰控制器的无刷直流电机控制系统[J]. 中国电机工程学报, 2005, 25(2): 82-86.
[7]Song J H, Choy I. Commutation torque ripple reduction in brushlessdc Motor drives using a single dc current sensor [J]. IEEE Transactions on Power Electronics (S0885-8993), 2004, 19(2):312-319.
[8]刘冰,李文,丁鸣艳.基于MATLAB的模糊PID控制系统的设计及其仿真[J].仪器仪表用户,2006,13(2):87-89.
[9]李楠,孟庆春,付晓峰.基于参数自整定模糊PID控制策略的电机模型仿真研究[J].机电工程技术,2004, 33(9): 55-57.
[10] Bac-Gang W U, Ying H. Review of fuzzy PID control techniques and some important issues[J]. Zidonghua Xuebao/acta Automatica Sinica, 2001, 27(4):567-584.
[11] 张好明,孙玉坤.永磁交流调速系统参数辨识与PI自整定研究[J].中国农村水利水电.2008(5):121-123.
[责任编校: 张岩芳]
The Model Reference Adaptive Control System of BLDCM
LIU Guangya, MIN Jie
(SchoolofElectricalandElectronicEngin.,Hubeiuniv.ofTech.,Wuhan430068,China)
Abstract:Load disturbances, parameter variations and detection of noise uncertainty have seriously affected the brushless DC motor servo control system control performance. While the traditional PI controller can't adapt to these changes. Through the study of model reference adaptive control, we designed the parameter identification adaptive law by using popov theory, and then set PI regulator to track a given rate based on identification inertia adaptive. The simulation results show the control system has high precision, strong adaptability and anti-jamming capability with control external changes compared with Fuzzy adaptive PI controller experiment.
Keywords:Brushless DC motor; model reference adaptive;inertia
[收稿日期]2015-05-13
[作者简介]刘光亚(1959-), 男, 湖北武汉人,工学博士,湖北工业大学教授,研究方向为自动化测控技术,动力与电气工程,机械设计及理论
[文章编号]1003-4684(2016)02-0073-04
[中图分类号]TP273
[文献标识码]:A
