一种具有角位置信号反馈的振镜驱动电路设计
2016-06-02华中光电技术研究所阮仁秋
华中光电技术研究所 阮仁秋 丁 捷
一种具有角位置信号反馈的振镜驱动电路设计
华中光电技术研究所 阮仁秋 丁 捷
【摘要】在线阵扫描型红外热像仪中,扫描振镜是重要的组成部分,其功能是将景物经过光学系统汇聚后的辐射信息精确传递到探测器靶面上,所以振镜的扫描角度就决定了信号能否精确到达靶面。而振镜的扫描角度又由驱动硬件电路所控制。针对此,本文提出了一种基于DSP控制方案,具有角度位置反馈的振镜驱动电路。
【关键词】线阵红外热像仪;振镜;角度位置反馈
1 引言
目前,线阵红外热像仪已经广泛应用于军事、民用领域。线阵红外热像仪的成像原理是基于热辐射定律,一切高于绝对零度的物体都具有热辐射[1]。即是镜头光学系统将无穷远处的景物辐射聚焦到探测器靶面上,将辐射光信号转变成模拟电信号,再经过图像处理硬件电路实现图像输出。然而景物辐射在到达探测器之前必须经振镜扫描辐射信息,到达探测器靶面,排列、处理,才能真正意义上的还原景物的真实信息。振镜工作的可靠性将决定热像仪的成像质量,所以热像仪中振镜的控制电路将影响最后的成像质量。
扫描镜在线阵红外热像仪中的工作原理是,其是基于DSP为控制核心,当系统开始工作时,由于探测器要达到正常工作温度需要一定的时间,所以此时扫描镜接收到的控制信号是一个慢扫描的过程。当探测器杜瓦瓶达到正常工作温度时,控制芯片立刻给扫描镜驱动模块发送指令,其实现快扫描。从而才能实现图像输出。
扫描振镜的工作状态完全是由驱动电路所决定,驱动电路是介于振镜与核心控制芯片之间的桥梁,当上位机要发送指令使系统达到某个运行状态时,DSP会发出指令,从而实现D/A转换,使驱动电路获得模拟信号,才能驱动振镜运行。反之驱动电路还能检测振镜的运行状态,再通过A/D转换传递给DSP,就直接能从上位机上查看状态信息。
振镜扫描的过程实质上就是角度输出的过程,而振镜的中心位置是前端光学系统的焦点位置,而如果不能对其扫描角度实行精确稳定的控制。将影响辐射信息到达探测器。
2 扫描镜驱动电路设计
扫描振镜包括反射镜片、运动电机以及外部控制电路组成[2]。控制扫描镜实质上就是控制电机按照系统内部要求作往返运动。即是只有采取相应的伺服驱动控制,电机才可按要求工作。
本文中控制系统采用闭环控制,功率放大和增益放大之间有微分反馈和电流反馈,电流反馈保证了扫描的高精度和响应的快速性;转速微分反馈单元确保了振镜电机线圈电流的平稳,减少电流超调量,增强系统响应速度。通过对输出信号与输入信号之间增加了角位置反馈单元,的处理能够保证电机准确、快速、平稳运行。
振镜信号为模拟电压输入,相应的输入电压对应反射镜相应的角度偏转。
通常来说,振镜电路的最大电压为±5V或者±10V。即此时电压为反射镜偏转的最大角度位置偏转电压,当电压继续增大时反射镜将不再偏转。在输入电路中往往阶跃瞬间输入信号与反馈信号之间幅度差值过大,这就可能会导致输出级功率放大器的电流过大,超出了其所能承受最大电流,使系统无法正常工作。所以为了确保电机能够安全可靠工作,则需要对输入信号进行处理。处理电路如图1所示。

图1 输入信号处理电路

图2 输出信号处理电路
然而在输出电路部分,其目的是为了给扫描振镜电机驱动,即是给电机线圈提供足额的电流,以产生所需的转矩。所以在输出电路中,实质上就是电流放大电路。本文采用的功率放大器LM3886,其在结合实际应用中有以下特点,输出功率大;失真度小(总失真加噪声<0.03%);电流电压抗过载能力强;环境温度试验得出其高低温工作稳定性较好;以及抗电流瞬间冲击力较强。输出功率放大电路如2所示。
在输出信号电缆中,为保证扫描镜在系统中正常稳定的工作,其还可以对扫描镜运行时的电压以及电流进行监控。
3 角位置反馈处理电路
从第二节驱动原理中可以看到,通常采取的反馈手段为电流反馈与微分反馈,而从实际应用中发现,这两种反馈方式还存在着一定的高频信号。然而角位置信号目的是通过获得高频信号的幅值用以确定角度偏差。其原理如下,因为在振镜电机中,传感器是可变差动电容式传感器,可变差动电容式传感器输出高频幅值通过电容值的改变而发生相应变化。也就是说高频信号幅值的大小由电容值调节。那么我们可以把获得角度偏差的大小转化为计算高频信号幅值。
角位置信号检测处理电路是由二极管检波电路和差分滤波电路够成。首先检波电路获得高频信号,再由滤波电路滤波反馈给输入电路。
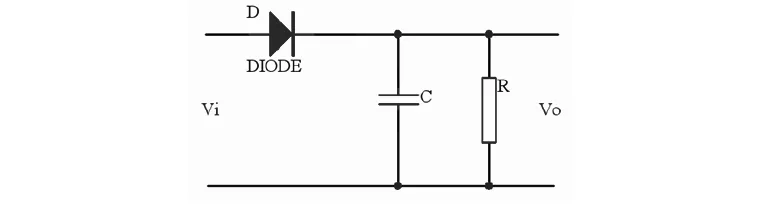
图3 检波电路
检波电路如图3所示,实质上就是角度位置信号经过解调后,再经过二极管检波电路,进行RC低通滤波,再进行差分放大,就可以得到相应的角度信号。差分放大电路如图4所示。

图4 差分放大电路
如图4中所示的输入信号Ia、Ib为角度位置信号经过二极管检波电路得到的信号,VA、VB为差分信号,VP就是所要得到的角度反馈信号。
4 结论
本文提出了一种具有角度反馈信号的扫描振镜驱动电路,其控制核心是DSP,重点介绍了驱动电路中反馈信号除了基于增益放大和功率放大产生的微分反馈和电流反馈外,通过获取高频信号幅值而得到的角位置反馈。经过实际的测试这种驱动电路对扫描振镜扫描角的控制更加精确与稳定,尤其在热像仪光轴校正、视场标定中更加精确和快捷。不仅如此,本文提出的扫描镜驱动方法在激光扫描系统中同样可以借鉴参考。
参考文献
[1]杨臣华,梅遂生,林钧挺.激光与红外工程手册[M].北京﹕国防工业出版社,1990.
[2]刘本善,裴先登,卢祖弼.振镜扫描系统的特性研究[J].电子计算机外部设备.1994,18(6).
作者简介:
阮仁秋(1985-),硕士,工程师,主要从事红外成像技术及应用方面的研究。