驾驶场景研究及其发展应用概述
2016-05-30朱向雷陈辰宝鹤鹏温泉
朱向雷 陈辰 宝鹤鹏 温泉


摘 要:人—车—环境作为一个闭环的交通驾驶场景,在以往的研究中,往往仅着眼于对车辆技术的研发而忽视对人的驾驶行为及交通环境的研究。智能车辆的发展需要车辆有能力对所在的交通场景进行明确的判断,进而选择出正确的行车逻辑,协助驾驶员进行车辆操控。但是中国的驾驶场景复杂多变,每种复杂的交通场景下往往又需要不同应对措施。本文基于中国汽车技术研究中心驾驶场景研究项目,介绍了驾驶场景研究的内容与意义,并对其未来发展在驾驶员行为研究、驾驶场景库的搭建、智能车辆的研发等方向应用进行了描述。
关键词:驾驶场景;驾驶行为分析;智能车;车辆信息采集系统
1 引言
中国的驾驶场景复杂多变,如何识别出车辆所在的驾驶场景,并根据相应的驾驶场景选择出合适的行车逻辑,将是智能驾驶汽车发展函待解决的重要技术难题。驾驶场景大数据采集平台基于车辆信息采集盒子、传感器等硬件平台,通过对实际交通环境数据及车辆的运行状态信息进行采集后处理,来分析潜在的驾驶行为,并可以用于进行ADAS及智能车辆自动驾驶的算法优化和评估。通过数据采集和分析,建立基于实际交通环境的场景库。基于该场景库,不仅可以在具体功能开发过程中提出统计意义上的指导,避免关键参数主观臆断;同时也可以建立仿真模型库,并提供用户自动驾驶算法接口,将算法结果同实际数据进行定量分析,继而提出对已有自动驾驶模型的改进意见。
2 驾驶场景研究介绍
中国汽车技术研究中心的驾驶场景研究项目,通过对名爵锐腾1.5T DCT车辆进行改装并加装传感器,集成视频采集设备、激光雷达、毫米波雷达、陀螺仪、GPS终端及CAN总线车辆信息记录仪,综合考虑人、车、环境三者的因素,采集车辆正常行驶过程中的运行参数、驾驶人对车辆的操控信息及外部交通环境的变化信息。不同设备数据的采样频率、数据格式往往不同,本系统可以在统一时钟时间下对所有数据进行处理,解决时间轴统一的问题。
项目采用GPS定点对道路中特定的驾驶场景进行标定,以区分出十字路口、转弯、掉头等;通过雷达及摄像头的机器视觉处理方法对周围行人及车辆进行扫描以变对交通状态进行感知。整套系统可自动对需要的驾驶场景进行区分。
试验车先期在天津市内城区采集典型驾驶场景数据,包括城市综合路况,城区快速路,高速公路,隧道,高架桥等路况信息,将包含正常驾驶过程中如转弯,信号灯,变道,超车,跟驰等等多种情况。随后我们将对该车在全国各地进行复制,运用多辆试验车,全面涵盖如东北高寒地带,中部丘陵地带,西北沙漠地带的驾驶场景信息。尽可能全面的建设一个覆盖全国多数情况的驾驶场景数据库。
3 驾驶场景分类模型
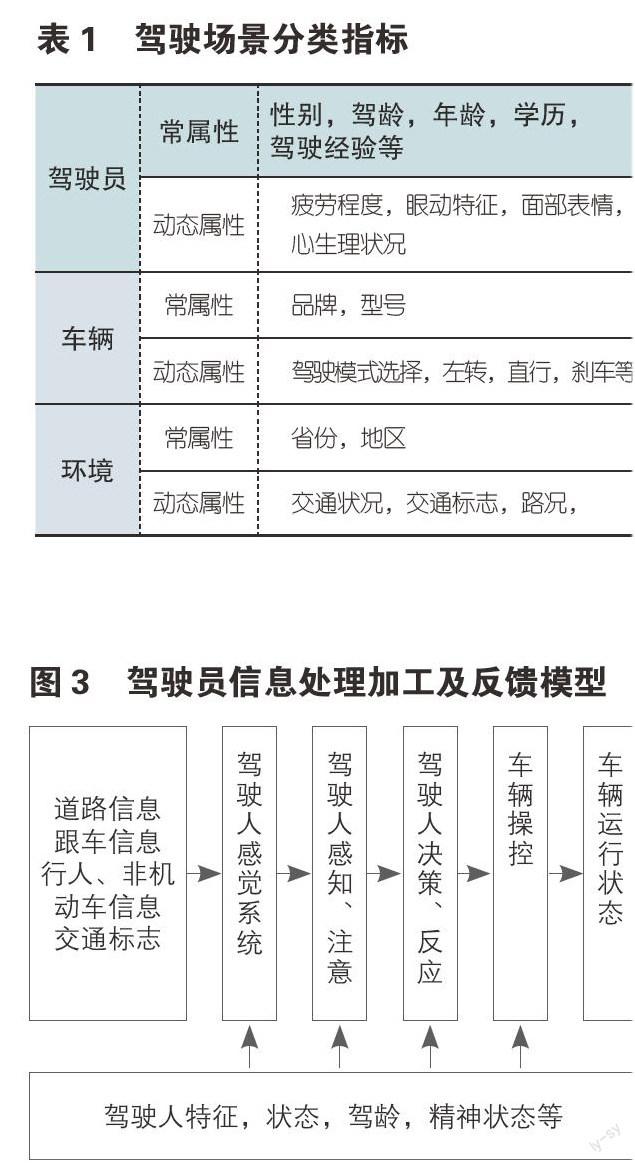
一个驾驶场景是由人-车-环境三个复杂因素共同构成,车辆是由人进行操控的,人的操控意识又受到道路交通环境的限制及车辆对人的反馈作用。车辆及交通环境是客观的,无意识的。而人是主动的,有意识的[1]。最为车辆的感知层与决策层,驾驶人在驾驶过程中将对空间内的一切信息进行感知,判断和处理,包括交通设施,交通标志,路况变化,天气变化,其他行人及车辆等。车辆在行驶过程中的一切信息也都是有驾驶员来反映和控制的。人-车-环境三者关系见图 2:
在该系统中,驾驶人属性,车辆的设计参数及运行状态,车辆行驶环境三者相互变化构成了错综复杂的驾驶场景,而准确识别出当前所在的交通场景,并对相应的场景做出合适的驾驶决策,这将是阻碍智能车发展最大的技术难题。
驾驶场景分类模型从坐标系的角度出发,以人、车、环境三个动态变化的因素构建坐标轴。其中驾驶人及车辆的本身屬性,如驾驶人性别、年龄、驾龄、学历、车辆的型号等在整个驾驶过程中不发生变化的量为常属性,用作对坐标系进行归类,不参与坐标轴的构建。将在驾驶过程中不断变化的参数,如驾驶人在驾驶过程中的疲劳状态、视觉特征、动机、情绪、车辆的运行状态如左转、直行、刹车、交通环境中的拥堵状况、信号灯、交通标志等,构建成坐标轴中互相独立的元素。在整个驾驶过程库中分别选取坐标轴上的每一个组合随机配合,再加上常属性的归类条件,即可以枚举遍布所有可能遇到的驾驶场景。
4 驾驶场景研究应用及展望
4.1 驾驶员行为研究
驾驶行为分析就是要对采集到的各类驾驶行为信息进行分析和处理,主要包括三方面的内容[2]:(1)驾驶行为表征体系研究。直接通过驾驶场景采集到的数据建立指标与驾驶行为特征之间的联系;(2)驾驶行为深层体系研究。通过对大样本人群的驾驶行为数据的分析,得出具有普适性的驾驶行为特征体系;(3)心理学层面的驾驶行为研究。对驾驶行为产生的原因进行神层次的探讨,从人类心理学的角度解释该行为产生原因。
4.2 驾驶场景库搭建
在驾驶场景数据库中,通过记录不同场景下的交通道路条件信息及车辆的运行状态信息,提取不同驾驶场景下的特征点,便于智能车辆研发中对相应场景进行识别。同时未来也可将构建好的智能车控制模型放在驾驶场景数据库中虚拟运行,对控制模型的准确性进行验证。
4.3 自动驾驶研发支持
汽车智能化已经是当今汽车产业技术革新的重要发展趋势。自动驾驶车辆从根本上改变了传统的“人-车-环境”闭环控制模式,将不可控的驾驶员从该闭环中请了出去,从而大大提高了交通系统的效率和安全性[3]。自动驾驶汽车就是通过先进的车载传感器,控制器等装置感知周围环境,再通过车辆的控制系统自主完成对车辆的操控,使车辆按照人的意愿来达到目的地的。智能车辆可以整体分为以下三个结构:感知系统,规划系统,决策和控制系统。驾驶场景实验一方面可以优化感知层的构建,收集自动驾驶情况下所能采集到的环境信息并对其进行语义解析,为决策层做出车辆的控制判断提供有效的依据。另一方面通过对各个驾驶场景下驾驶人对车辆操控的记录,建立起不同环境条件下车辆的行车逻辑,帮助智能车辆建立起一个更全面完善的决策层面。加速智能汽车进入人们生活的步伐。
4.4 展望
人—车—环境作为一个闭环的控制系统,通过对驾驶人及道路交通信息研究的重视程度的加深,如驾驶行为识别与分析,道路谱信息收集等,驾驶场景研究及数据库的建设可以帮助人们从另一个角度来助力车辆的正向研发进程并加速我国智能车辆的发展。
参考文献:
[1] 隽志才,曹鹏,吴文静.基于认知心理学的驾驶员交通标志视认性理论分析[J].中国安全科学学报,2005,15(8):8-12.
[2] 李平凡.驾驶行为表征及分析方法研究[D].吉林大学博士论文,2010.
[3] 乔维高.无人驾驶汽车的发展现状及方向[J].上海汽车,2007,07:40-43.
[4] 初秀民,严新平,毛喆,汽车驾驶操作信息数据库与采集系统设计[J].中国安全科学学报,2005,15(1):29-33.
[5] 余志生.汽车理论.北京:机械工业出版社,2009.
