民用飞机TCAS/S模式应答机激励器设计
2016-05-30徐扬
徐扬


摘要:依据机载TCAS/S模式应答机系统集成验证的要求,需要在试验室激励TCAS/S模式应答机系统,减少TCAS/S模式应答机系统试飞试验的次数。本文对民用航空TCAS/S模式应答机系统信号进行了分析,得到了TCAS/S模式应答机系统激励方法,完成了TCAS/S模式应答机系统设计方案,用以满足机载TCAS/S模式应答机系统的试验室试验。
关键词:TCAS;S模式应答机;机载;激励器;
中图分类号:V22文献标识码:A 文章编号:1674-098X(2016)05(c)-0000-00
Abstract:According to the test needs of TCAS and Mode S transponder system, the TCAS and Mode S transponder system shall be stimulated in lab to decrease the flight test of TCAS and Mode S transponder system. This paper analyses the TCAS and Mode S transponder system signal, gets the TCAS and Mode S transponder system stimulator method, and designs the TCAS and Mode S transponder system stimulator, which will be used in airborneTCAS and Mode S transponder system test on the lab.
Keyword: Traffic Alert and Collision Avoidance System; Mode S transponder; Airborne;Stimulator
1. 引言
为了提高飞行过程中的安全,民用飞机普遍安装了TCAS和S模式应答机系统,TCAS和S模式应答机联合工作, 在本机与其他飞机之间存在潜在碰撞冲突时, 提供交通提示和告警,有效提高飞行安全程度。TCAS是一种空中交通警戒与防撞系统。目前世界范围内使用的TCAS系统大多属十TCASII系统。该系统通过询问本机周围飞机的ATC应答机,运用自身计算机系统识别和显示潜在的碰撞威胁。TCAS II能够为飞行员提供语音和视觉告警,提醒飞行员潜在的威胁以及如何应对可能的冲突[1]。应答机的作用是接收和识别他机TCAS或者二次雷达地面站的询问,在满足适航规范的条件下,作出相应的应答。S模式是西方国家研制出的一种新的空中交通管理模式,可以解决A/C模式二次监视雷达(SSR)存在的目标分辨力差、串扰、混扰等问题。S模式系统是一个A/C模式二次监视雷达和数据链的组合系统,可以提供比当前的二次监视雷达更强的监视能力、更高的精度和更高的可靠性[2]。机载TCAS/S模式应答机系统的集成和测试具有其技术特殊性,其主要特点为系统严重依赖地面、空中和高空设备配合,只能通过飞行验证的方式才能较好地利用这些资源,但是其缺点是系统测试严重依赖试飞,因此,将那些分布在地面、空中和高空的设备“搬移”到实验室内,并能根据需要随意控制其参数和模式,以实现TCAS/S模式应答机系统在实验室条件下的“飞行”验证,具有非常重大的现实意义。
本文研究了适合实验室条件的TCAS/S模式应答机系统激励器实现技术,完成了TCAS/S模式应答机系统系统激励器设计,用以满足机载TCAS/S模式应答机系统系统的试验室试验。
2. S模式应答机激励技术
2.1 空中交通管制(ATC)系统功能及原理
空中交通管制雷达信标系统(ATCRBS)是实现ATC的主要手段,是保证空中交通安全的主要系统。空中交通管制应答机是ATCRBS的机载设备,它需要与地面的二次雷达配合工作,通过它可以向地面管制中心报告飞机的识别代码、飞机的气压高度等。机载应答机分为A/C模式应答机和S模式应答机,A/C模式应答机与地面的ATCRBS配合工作,S模式应答机与地面的离散寻址信标系统配合工作。二次雷达工作过程是:由地面询问雷达发射一定模式的询问信号,机载应答机收到这个模式的询问信号后,经过信号处理、译码,然后由应答机发回编码的回答信号。地面雷达收到这个回答信号,从中解出飞机代号、高度、方位和距离,从而实现对飞机的跟踪、监控和指挥。
2.2 S模式应答机激励方法
S模式应答机的激励需要仿真机载ATC天线接收到的地面二次雷達的询问信号,这个信号的脉冲编码格式、编码方式和信号频率等参数与ATC地面二次雷达发射的询问信号是完全一致的,仅有的区别是射频信号功率,激励信号功率只需在机载S模式应答机的接收灵敏度范围内即可。
图1所示是S模式应答机激励器功能框图,信号处理器接收激励控制送来的激励命令和参数,按照相关标准生成A/C模式、S模式或TCASII的询问脉冲序列,对频率源产生的1030MHz的载波信号进行ASK调制,经功率放大后输出射频询问信号。
3. TCAS激励技术
3.1 TCAS系统工作原理简述
TCAS是通过“收听-询问-应答”方式获取监视空域中其它飞机的信息的。在管制空域中,不论是装备A、C模式应答机的飞机,还是装备S模式应答机的飞机,总是在不断地和地面二次雷达通过询问-应答方式向ATC中心提供各自的识别码、高度信息或S模式的24位地址码。即使在无地面雷达询问的情况下,装备S模式应答机的飞机也会断续地发射(即间歇信标),以告知其他飞机本机的存在。本机TCAS接收机的工作频率为1090MHz,所以可以收听到这些飞机的应答信号或断续发射信号,从而感知周围空域中其它飞机的存在,并记下其地址码。
此后,TCAS通过自己的TCAS发射机发射1030MHz的询问信号,询问装备A、C模式应答机的飞机。C模式应答机所应答的是其高度信息。TCAS计算机在获得这些飞机的高度以及航向等信息后,可进而计算所需的其它数据。在完成对装备模式A、C应答机的飞机的询问后,TCAS计算机即根据所获得的24位地址码,分别询问装备S模式应答机的飞机,以获得所需的信息。TCAS的“收听-询问-应答”过程是不断进行的,其更新期约为1秒。
在本机的TCAS询问对方的同时,本机的应答机也会对其它飞机的询问作出应答。与此同时,本机的应答机保持对地面二次雷达的应答。TCAS设备通过测定发出询问信号时刻到接收到应答信号时刻之间的时间差,来计算出自己与目标飞机之间的相对距离。TCAS接收天线是方向性天线,由四个阵子组成,四阵子之间的相对位置与1090MHz应答信号波长成一定的比例关系。由于四阵子位置的不同,接收到的应答信号存在相位差,TCAS设备通过测得这些相位差计算出目标飞机相对于本机的方位。
3.2 TCAS的激励方法
针对TCAS的询问功能,激励器应仿真TCAS方向性天线接收到的四路目标机应答信号,并通过控制应答信号发射时延来仿真目标机距离,通过控制四路射频信号相对相位差来仿真目标机的方位,其激励功能框图如图4所示。
信号处理器根据机载TCAS设备发出的询问信号产生相应模式的应答脉冲序列,并根据激励控制命令进行应答延时和相移计算,应答脉冲序列对频率源产生的1090MHz信号进行调制,经功率放大后分成相同的四路应答信号,每一路在移相控制下进行相位偏移,最后输出四路相位不同的应答射频信号。
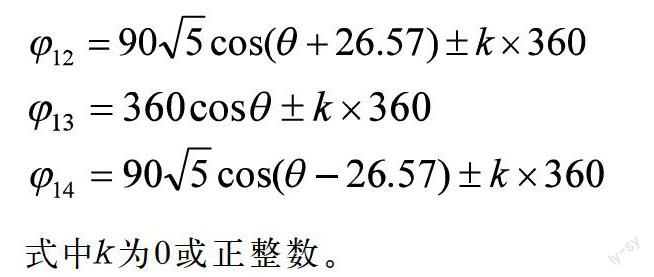
在TCAS应答信号的激励仿真中,四路信号的相位控制是仿真的关键点,而如图3所示TCAS天线的1、2、3、4号阵子之间的相对距离是进行移相计算的重要参数,因此必须准确了解所仿真天线四阵子相对位置。ARJ21飞机TCAS天线参数是:1、3号阵子之间距离为1个波长(1090MHz),2、4号阵子之间的距离为半个波长。
若目标飞机相对方位角度设为θ,则2、3、4号阵子相对于1号阵子的相位关系分别为:
式中k为0或正整数。
在进行激励仿真时,根据需要仿真的目标飞机相对方位θ,利用TCAS天線4个阵子的相位之间的函数关系可以计算出2、3、4号阵子相对于1号阵子的相位值φ1,φ2,φ3,信号处理器根据计算出的φ1,φ2,φ3的值产生移相码控制3路数控移相器,实现4路相位不同的应答信号的模拟。
4. 结束语
本文介绍了机载TCAS/S模式应答机系统激励器设计,该激励器可以完成TCAS/S模式应答机系统激励。使用机载TCAS/S模式应答机系统激励器可以在试验室完成TCAS/S模式应答机系统的功能测试,大大减少TCAS/S模式应答机系统飞行测试的次数,提升TCAS/S模式应答机系统测试的广度和深度,保证机载TCAS/S模式应答机系统功能的顺利验证。
参考文献:
[1] 沈佳峰; 民机TCAS机动策略与仿真研究[D]. 上海:上海交通大学, 2011
[2] 马进; 基于FPGA的TCAS与S模式应答机综合化数字中频接收系统的设计与仿真[D]. 上海:上海交通大学, 2011
[3]王有隆; 从德国博歌湖撞机事件看TCAS与飞行安全[J]. 中国民航飞行学院学报,2005,16(6)
[4] 黎峰; 空中交通警戒和防撞系统的发展历程[J].中国民用航空, 2004,10(46): 81-83
[5]肖宇; 我国民航雷达的变迁[J]. 空中交通管理, 2000,03: 24-26
[6]兰鹏; S模式与军用敌我识别[J]. 电讯技术, 2006,46 (3 )139-143