咖啡机搅拌棒供给系统设计
2016-05-30李勇
摘要:近几年我国咖啡机行业发展速度较快,受益于咖啡机行业生产技术不断提高以及下游需求市场不断扩大,咖啡机的种类不断由低端的半自动向全自动、由单功能向多功能发展。鉴于眼下咖啡机行业在我国的蓬勃发展,文章围绕着全自动咖啡机核心部件之一——搅拌棒机构设计准备、原理设计、重要参数计算进行了阐述。
关键词:咖啡机行业;全自动咖啡机;搅拌棒系统;搅拌棒;原理设计 文献标识码:A
中图分类号:TB47 文章编号:1009-2374(2016)21-0006-02 DOI:10.13535/j.cnki.11-4406/n.2016.21.003
1 概述
随着中国经济的迅猛发展,近几年我国咖啡机行业发展速度较快,受益于咖啡机行业生产技术不断提高以及下游需求市场不断扩大,咖啡机的种类也不断地由低端的半自动向全自动、由单功能向多功能发展。一台全自动多功能的咖啡机需要包含如下核心部件:研磨器、酝酿器、搅拌器、搅拌棒供给机构、杯子供给机构等。本篇围绕全自动咖啡机核心机构——搅拌棒供给机构的原理设计与验算做介绍,为大家展示一个实际运用的案例,希望能为相关产品设计提供参考。
2 准备工作、前期分析
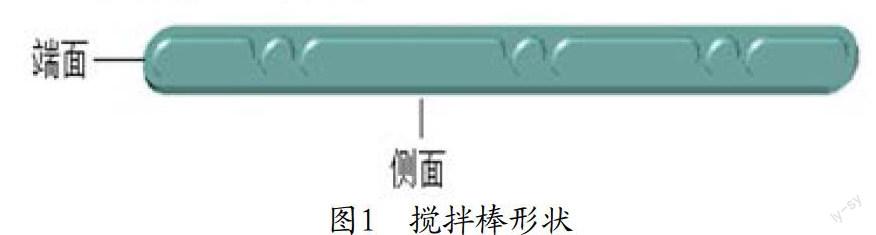
2.1 搅拌棒结构尺寸分析
本篇介绍的咖啡机搅拌棒如图1形状,厚度1.4mm,宽度9.5mm,长度90、105、115、125mm等系列。此件由注塑模生产而成,目前国内外有多家厂能生产尺寸相同的此产品,但模具结构有所不同。如,浇口设计不同:端面侧水口,顶面点水口;分型面不同:A分型面设计在底面,B分型面设计在产品中部;产品表面处理不同:有的产品表面蚀纹,有的产品表面抛光;产品缺陷不同:侧面毛边,水口太高甚至变形等。在做原理设计时,需要充分考虑到各个方面,才能保证设计出的机构能效适应各种不良状况,使机构运行稳定、工作效率高。
2.2 搅拌棒需求分析
系统原理时,需要了解不同长度的搅拌棒所使用的环境。多数机器根据不同的饮料配有相应长度的搅拌棒,如:意大利浓咖啡(Espresso)需要90mm搅拌棒,卡布奇诺(Cappuccino)需要115mm,大杯巧克力咖啡(Chocolate-coffee)、汤(Soup)需要125mm。所以咖啡机能配备的搅拌棒长度规格越多,整个系统灵活性就越高,市场竞争力就越强。
2.3 搅拌棒数量分析
机构原理时,还需要综合考虑在一台咖啡机内应配备多少数量的搅拌棒。搅拌棒配备数量越多维护成本越低,但需要的驱动件动力更大,需要占用的空间越多等。本篇结合咖啡机的整体布局、售卖量与维护周期,设计了两种长度搅拌棒,每种长度的能可装填350件。
3 原理设计及各参数确定
系统设计的总体目标是:智能控制,动作稳定,寿命可靠,易于装填,数量合理,不易受到外部的污染,容易维护。
3.1 搅拌棒取件方式设计
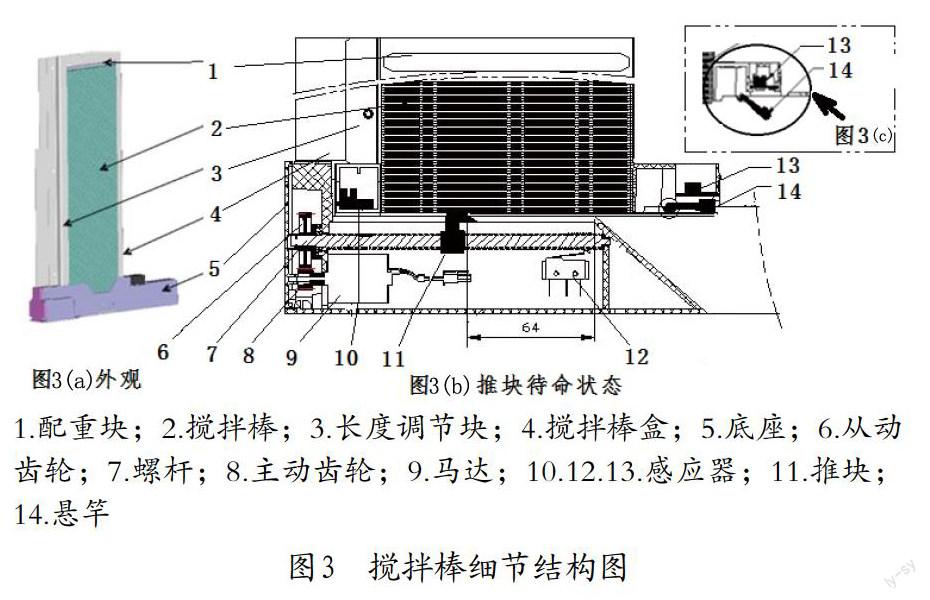
考虑到装填方便与实际需求,在此咖啡机内放置两叠不同长度的搅拌棒(根据售卖市场不同,长度可调),每叠可放350件,如图3(a)。填料方式是从上向下,而取搅拌棒的顺序是从下向上,如此可保证先进先出。由于是从整叠的最底部取走一件,余下部分在重力作用下自动下落填补空间。在机构设计时便可考虑设计一个部件做往复运动取搅拌棒,至到将整叠取完,这样的设计有效利用了产品的重力,从而巧妙地简化了此系统的结构。
考虑如何取搅拌棒:(1)在整叠搅拌棒底部设计一个摩擦轮,利用摩擦力将最底一件搅拌棒从长度方向或宽度方向带出;(2)在整叠底部设计推块,将最下一件搅拌棒从宽度或长度方向推出。两种取件方式优缺点分析:方式(1)机构设计更为简单,但是由于搅拌棒之间残留的水口及表面蚀纹,造成摩擦力过大,而不能保证每次有效地将其推出(这点在实际测试中也得到了验证);方式(2)可解决摩擦力影响的问题。接下来选择具体机构来实现方式(2):在带轮上设计一个推块,做往复运动或周转运动取搅拌棒;用连杆机构;齿轮齿条机构;设计螺杆传动机构。各种方式实现的空间与布局会有所不同,从本机布局方面,我们倾向于设计成两个并排放置,从长度方向取件的机构。最终选择的搅拌棒取件方式为:螺杆传动机构。
3.2 具体参数的设计
3.2.1 重要零件尺寸设计。螺杆、推块、马达及齿轮等重要零部件的相应尺寸根据搅拌棒长、宽大可致确定。螺杆尺寸:由于传动机构设计在搅拌棒底部,在工作过程中螺杆径向需要承受上方的重力,合计约500g(如下细节计算)。通过验证,螺杆设计为M8×1.5,长度130mm(大于最长搅拌棒);马达尺寸:选择?26mm,长度40mm,最大效率处参数:T0=3.835N·mm,SPEED=8100RPM,直流电机;齿轮尺寸:推块按现选马达与螺杆计算其运动速度v=1.5×8100/60=202.5mm/s,此速度太快,在工作中容易出错,需要加入二级齿轮降速并提高输入力。经过初步计算(计算过程略)此设计选择:主动齿:M0.5-Z19,从动齿:M0.5-Z55。
3.2.2 参数验证。搅拌棒重力产的压力:G=1.3×350+50=500g=5N(125mm长度搅拌棒约重1.3g,配重块重约50g)。
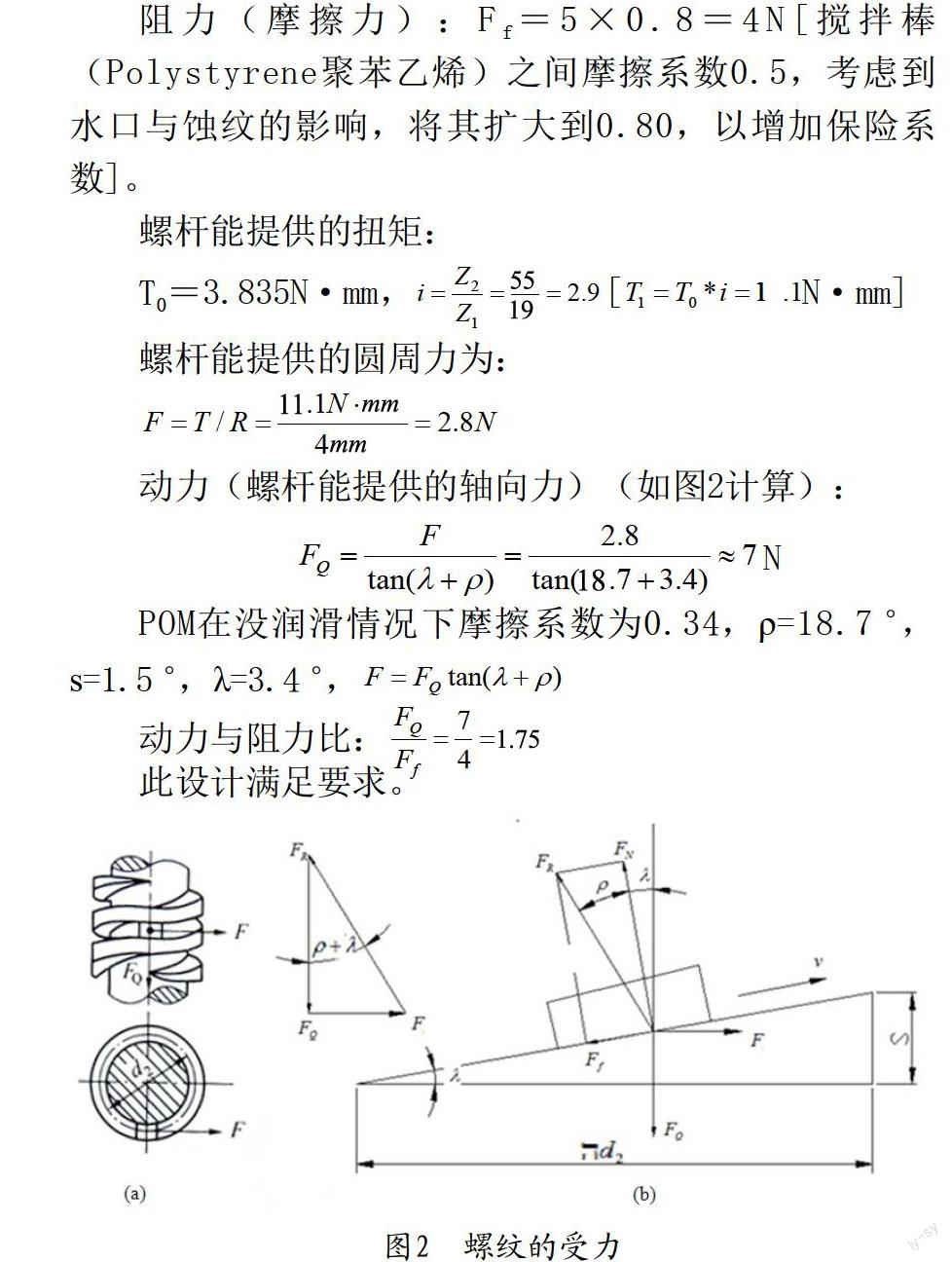
阻力(摩擦力):Ff=5×0.8=4N[搅拌棒(Polystyrene聚苯乙烯)之间摩擦系数0.5,考虑到水口与蚀纹的影响,将其扩大到0.80,以增加保险系数]。
螺杆能提供的扭矩:
3.3 控制、运动过程
下面简要介绍最终系统的控制与运动过程,以便对整个系统结构与控制有全面的认识(具体设计、调试与改善过程此处不再做详细介绍)。如图3(a)为设计的外观结构(本机构配置了两件4此结构);图3(b)推块待命状态图中可看到,此设计两个感应器1、12分别控制推块左、右运动位置,感应器13记录被推出的搅拌棒状态。机构操作过程如下:
3.3.1 准备工作:根据需要的搅拌棒长度调整调节块3的位置,从上向下放入搅拌棒2、配重块1。
3.3.2 取搅拌棒过程,如图3(b):推块11处于待命状态,当客户在咖啡机面板中选择饮料,系统会智能驱动相应的推块向右运动64mm并触发感应器12而停止,同时一件搅拌棒会在自重作用下落入咖啡杯内,完成取搅拌棒。
3.3.3 复位过程:当客户拿走咖啡杯后,推块11会自动向左运动并在感应器10下方停下2秒,确保上方搅拌棒落入搅拌棒盒后,继而向右,同时推出一件新搅拌棒运动至如图3(b)位置待命。
3.3.4 重点:待命位置设计在中部,可缩短有效工作距离,因为复位过程不占用实际取搅拌棒的时间;同时在待命状态悬竿14是由自由状态,如图3(c)在搅拌棒驱动下旋转到水平状态并激活了感应器13,如果机构内没有搅拌棒或没有效推出搅拌棒,感应器13便不能被激活,这样系统会驱动推块11重复一次取件动作,如果传感器13仍然未能被激活,系统会认为搅拌棒用完,下次客户买咖啡机时便不会再驱动机构取搅拌棒,而是出现一个提搅拌棒已用完的提示。同时后台会将此信息第一时间通过远程发给运营商。为了使此系统运动平稳、有效,在实际设计中还需要重点考虑螺杆、推块、齿轮、底座各重要零部件材料、细节设计,在软件调试方面也做相当多的调整与特殊处理,这里不再做
介绍。
4 结语
本设计充分考虑了维护、制造、智能化、可靠性、耐久性等多方因素,从原理设计、验算、材料选择、模板加工测试、改善、开模、实际样件装机测试等步步为营,设计出一个全新、智能、可靠的机构。本文围绕咖啡机搅拌棒供给机构原理设计、关键零部件尺寸参数确定、受力验算等做实例,为读者介绍新设计需要考虑、验证的问题、过程,以供参考。
参考文献
[1] 黄平,朱文坚.机械设计基础[M].广州:华南理工大学出版社,2008.
作者简介:李勇(1977-),男,四川仁寿人,法雷奥发动机冷却(佛山)有限公司工程师,研究方向:机电技术。
(责任编辑:黄银芳)
