航空影像落水区域空三自动分区方法研究与应用
2016-05-30李能能
李能能, 柯 涛
(武汉大学 遥感信息工程学院, 湖北 武汉 430079)
航空影像落水区域空三自动分区方法研究与应用
李能能,柯涛
(武汉大学 遥感信息工程学院, 湖北 武汉 430079)
[摘要]利用落水测区的空中三角测量匹配点成果,自动识别落水影像,并通过对影像间的连通性进行分析,采用两种连通域标记算法将不能满足连接条件的区域进行分割,实现测区影像的自动分区,为分区平差提供依据。实验表明,应用连通域标记算法进行航空影像落水区域空中三角测量自动分区,不仅提高了测区落水影像识别的准确度和分区的自动化程度,而且能够根据不同的精度要求得到相应的分区结果。
[关键词]空中三角测量;落水影像;连通域标记算法;自动分区
空中三角测量是摄影测量中确定区域内所有影像的外方外元素以及加密点地面坐标的有效方法,是摄影测量数据处理过程中必不可少的作业步骤[1]。随着计算机及相关领域技术的不断发展,摄影测量已经进入数字摄影测量阶段,空中三角测量也逐渐进入自动甚至智能空中三角测量阶段[2]。在此过程中,水域一直是研究中的重点和难点。在有大面积水域的测区进行空中三角测量加密的难度要远远大于一般的测区,难点主要包括以下两个方面[3]:由于水域缺乏纹理或重复纹理容易造成匹配困难;即使能够得到匹配点,也存在大量落水点,而落水点中误匹配点较多,平差算法中的自动粗差探测也不能完全检测并自动剔除这些误匹配点,因此空中三角测量中自动匹配的落水点是不能用于平差计算的。显然,如果不能对落水区域进行有效处理,当其面积大到一定程度时,就会对匹配结果的精度产生影响,这势必会影响整个测区空中三角测量成果的精度。
现阶段对包含落水影像的测区进行处理的方法主要有以下两种:一是提取水域之后剔除落水点[4-5],但是利用不同方法提取出影像中水域后再将落入其中的匹配点剔除,多数情况下都需要进行人工编辑,工作量较大;二是对测区进行分区处理[6-9],然而区域划分主要采用人工划分的方法,这种方法容易出现遗漏或误判断,准确率不高,同时,作业过程中需要根据空中三角测量的精度和进展,反复对测区进行子测区的划分,修改测区文件,这不仅提高了作业员对软件使用熟练程度和作业经验的要求,而且大大增加了作业的复杂性和工作量。上述两种方式都需要大量的人工处理,效率较低,因此,利用计算机最大限度地提高测区内落水影像识别的准确度、分区的自动化程度,提高平差精度,降低生产成本是摄影测量发展的必然趋势。我国学者在这方面已经做了大量研究,并取得了一定的成果[2]。本文在此基础上对分区方法进行研究,并将其应用于具体实例之中。
1落水影像的识别
影像与相邻影像间的连接关系可以由影像匹配结果确定。航带内左右影像连接关系的好坏取决于相对定向残差,当相对定向残差不满足规定阈值时,左右影像无法连接。航带间影像连接关系的好坏则取决于航带间连接残差,当残差不符合要求时表示连接失败。落水影像是指由于影像缺乏纹理或纹理较差,造成匹配困难,从而导致影像无法进行相对定向和模型连接,或相对定向和模型连接效果较差而不能参与区域网平差的影像。本文对每张影像与4个相邻影像间的连接关系进行判断,如图1所示,当与相邻影像均无法连接时,认定该影像为落水影像,本文中用“-1”表示落水影像的测区编号。
2测区自动分区
当测区内含有大量水域时,测区某些影像间相对定向和模型连接不成功或者效果不理想,即航带内或者航带间出现了断裂,此时整个测区可能被分成几个不同的区域,如图2所示,因此,无法进行整个测区的整体平差,必须对测区进行分区处理。
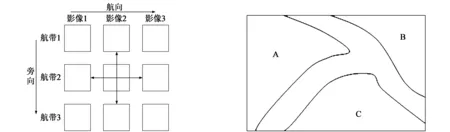
图1 影像与相邻影像间的连接关系 图2 落水测区示意图
2.1影像间连通性分析
影像间的连通性是确定连通区域的一个重要因素,是进行测区分区的一个重要依据。其定义为,设S表示测区中的一个影像子集,如果S中任意两张影像m、n之间都存在一条完全由这个集合中的元素构成的路径,就称影像m和n在S中是连通的,S即为测区中的一个连通区域[10]。测区影像连通性分析是将图像分割的原理引入空中三角测量自动分区,其基本思想是将测区影像集合看做由像素集合构成的数字影像,分析每张影像与相邻影像间的连接关系,然后利用图像分割算法的原理进行连通区域标记。连通区域标记的目的在于把测区自动分割成若干个互不连通的子测区。标记的结果将产生一个与原始测区影像数相等的测区分区标记矩阵。在标记矩阵中,属于同一连通区域的影像被赋予相同的测区编号,属于不同区域的影像则被赋予不同的测区编号。
2.2连通域标记算法
测区影像连通区域标记类似于图像分割中的二值图像连通区域标记。Costantino Grana按扫描次数将连通域标记算法大致归纳一次、二次和多次扫描连通性标记算法[11]。落水区域空三自动分区方法主要采用的是一次扫描标记算法中的区域生长法和传统的二次扫描标记算法[12-13]。
2.2.1区域生长法
区域生长法是将某个影像作为种子,根据影像间连接关系,将能与该种子连接的所有影像逐步合并到同一个影像集合中,从而得到一个完整的连通区域。算法实现步骤如下:
(1)按航带从左到右扫描测区影像,当遇到一个未编号的影像时,认为该影像是新的连通区域的种子,并赋予其新的测区编号;
(2)根据影像间连接关系,将与该种子连接的影像赋予相同的测区编号,并放入给定的队列中作为新的种子;
(3)从队首取出一个种子,继续执行步骤(2)直到队列为空,此时即可得到一个连通区域;
(4)继续扫描影像,直到测区内所有影像全部扫描完毕,即可完成整个测区的分区。
这种方法可一次性标记出一个完整的连通区域,然后再标记下一个连通区域,直到所有的连通区域都被标记,思路比较简单,且通过一遍扫描就能够完成整个测区的分区。然而由于这种方法是一种迭代方法,需要借助队列存取获取的种子,且存在大量冗余的相邻影像连接判断,因此空间和时间开销都比较大。
2.2.2二次扫描标记算法
传统的二次扫描标记算法的实现过程如下:
(1)按航带从左到右扫描测区影像,当遇到一个未编号的影像时,检查该影像与左边和上边影像的连接关系:①如果都无法连接,赋予当前影像一个新的测区编号;②如果只有一个连接成功,或者两个都能够连接但测区编号相同,则赋予和连接影像相同的测区编号;③如果两个都连接成功但测区编号不同,则为当前影像赋予较小的测区编号,并记录两个测区编号,即两个连通区域之间的等价关系。
(2)再次扫描测区,将具有等价关系的连通区域赋予相同的测区编号。
与区域生长法相比,尽管需要进行两次扫描,但这种方法每次只判断影像与左边和上边两个相邻影像的连接关系,减少了冗余的邻域连接判断,且没有借助堆栈、队列等数据结构,因此时间和空间开销都相对较少。
3实验与分析
本次实验所采用的测区数据如图3所示,由8条航带,每条航带44张影像构成,像素大小为0.036 mm。该区域为平坦地形,其中存在大面积水域,目视即可判断实验区内影像连接的传递势必会受到水体的影响而产生断裂。具体实验过程如图4所示。

图3 测区影像(十字丝为曝光点中心)
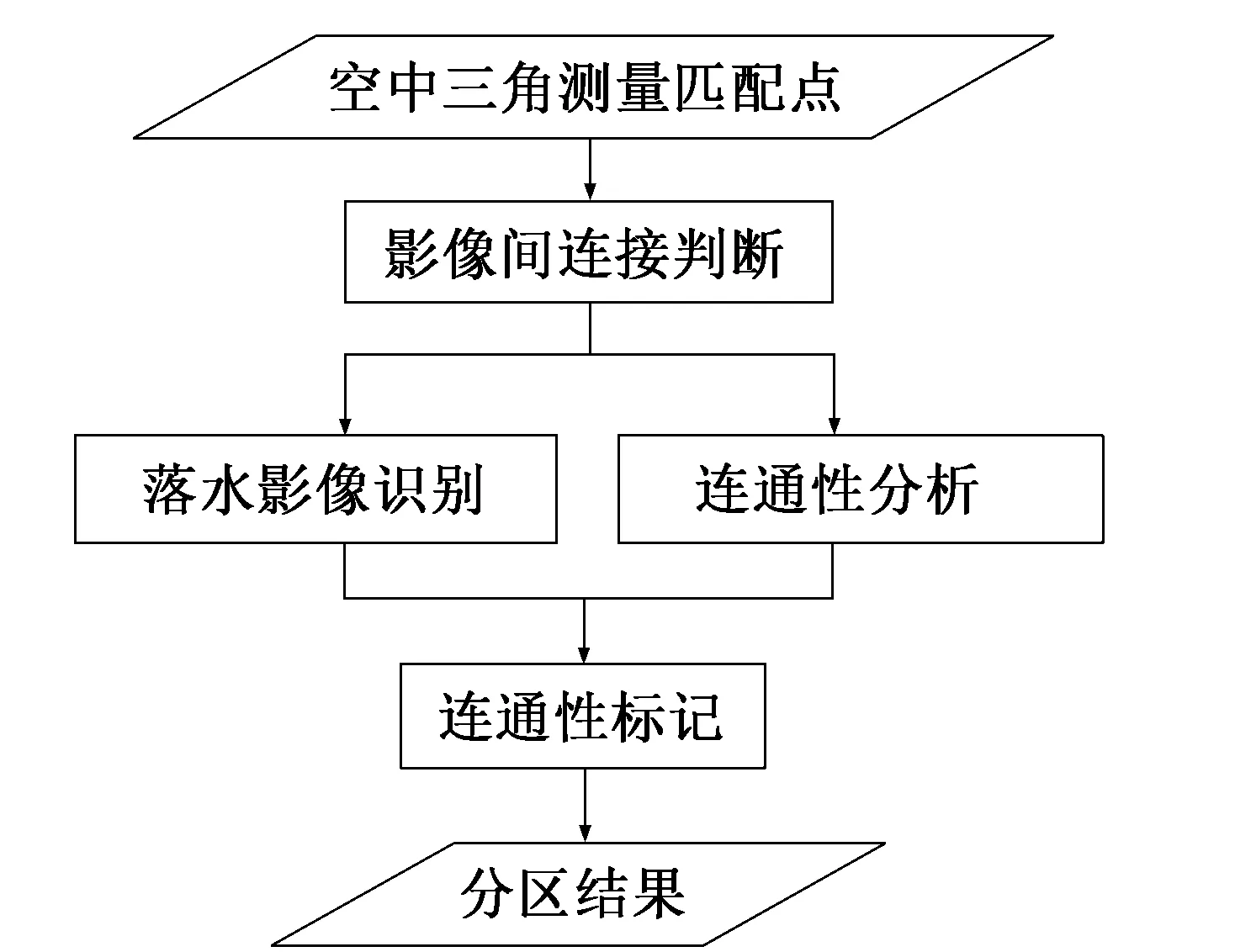
图4 落水区域自动分区流程图
3.1落水影像识别
利用空中三角测量匹配点成果进行航带内相对定向判断与航带间连接判断时,航带间连接情况是确定的,但是航带内连接情况受相对定向残差阈值d的影响会有所不同,如图5所示,-1表示落水影像,d的取值不同时,落水影像的判断结果有所不同。如图中椭圆区域所示,d=0.036 mm时被判定为落水影像的像片在d=0.072 mm时被判定为非落水影像。
3.2测区自动分区
阈值d的取值不同导致所识别的落水影像有所差异,同时对影像间连通性分析产生影响,因此会影响测区分区结果。如图5所示,d=0.036 mm与d=0.072 mm得到的分区结果有所不同。但是当所选阈值相同时,因为测区影像间连通性已确定,所以两种方法的分区结果完全相同,只是由于算法的不同,运行时间有所差异,由表1可知,区域生长法运行时间相对较长。
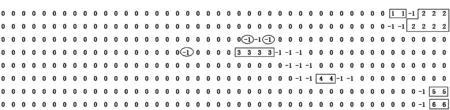
(a) d=0.036 mm(-1为落水影像,0~6为7个连通子测区)
(b) d=0.072 mm(-1为落水影像,0~5为6个连通子测区)图5 测区影像分区结果

标记算法运行时间(单位:ms,d=0.072mm)区域生长法2.2105292.2100632.3724232.2464542.176004二次扫描法1.5214301.5326271.5176981.5461581.549423
3.3结果分析
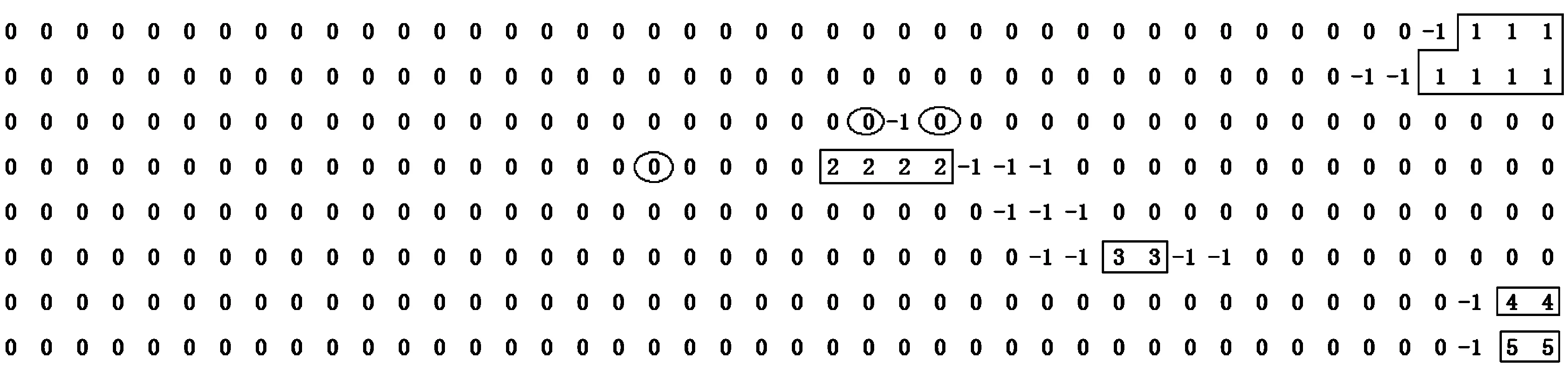
从以上分区结果可以看出,阈值d的选取是影响落水影像的识别和最后分区结果的主要因素,阈值越小,落水影像越多,分区也越多。在图5中,d=0.036 mm时被分为7个子测区,而d=0.072 mm时则被分为6个连通子测区。当阈值相同时,落水影像以及影像间的连通性已经确定,因此选择不同的分区方法并不会对分区结果产生影响。图6选择阈值d=0.072 mm的分区结果与测区影像进行对比,从对比图中可以看出,有些目视为水域的影像并未被识别为落水影像。造成这种情况的主要原因主要有两点:一是尽管测区影像旁向重叠度只有35%,使航带间连接性较差,但是航向重叠度达到65%,高精度的影像匹配算法能获取足够的匹配点使航带间连接成功,而只有影像与4个相邻影像均不连接时才被认定为落水影像,即只要能与一个相邻影像连接成功就可以被划归到某一子测区中;二是与阈值的选择有关,阈值越小,被判定的落水影像越多。这一结果也充分证明,目视被判定为落水区域的影像也可能满足平差条件,可以参与分区平差,但是采用人工进行区域划分的方法,容易出现误判断,认为这些影像不满足平差条件,因此人工划分准确率不高。
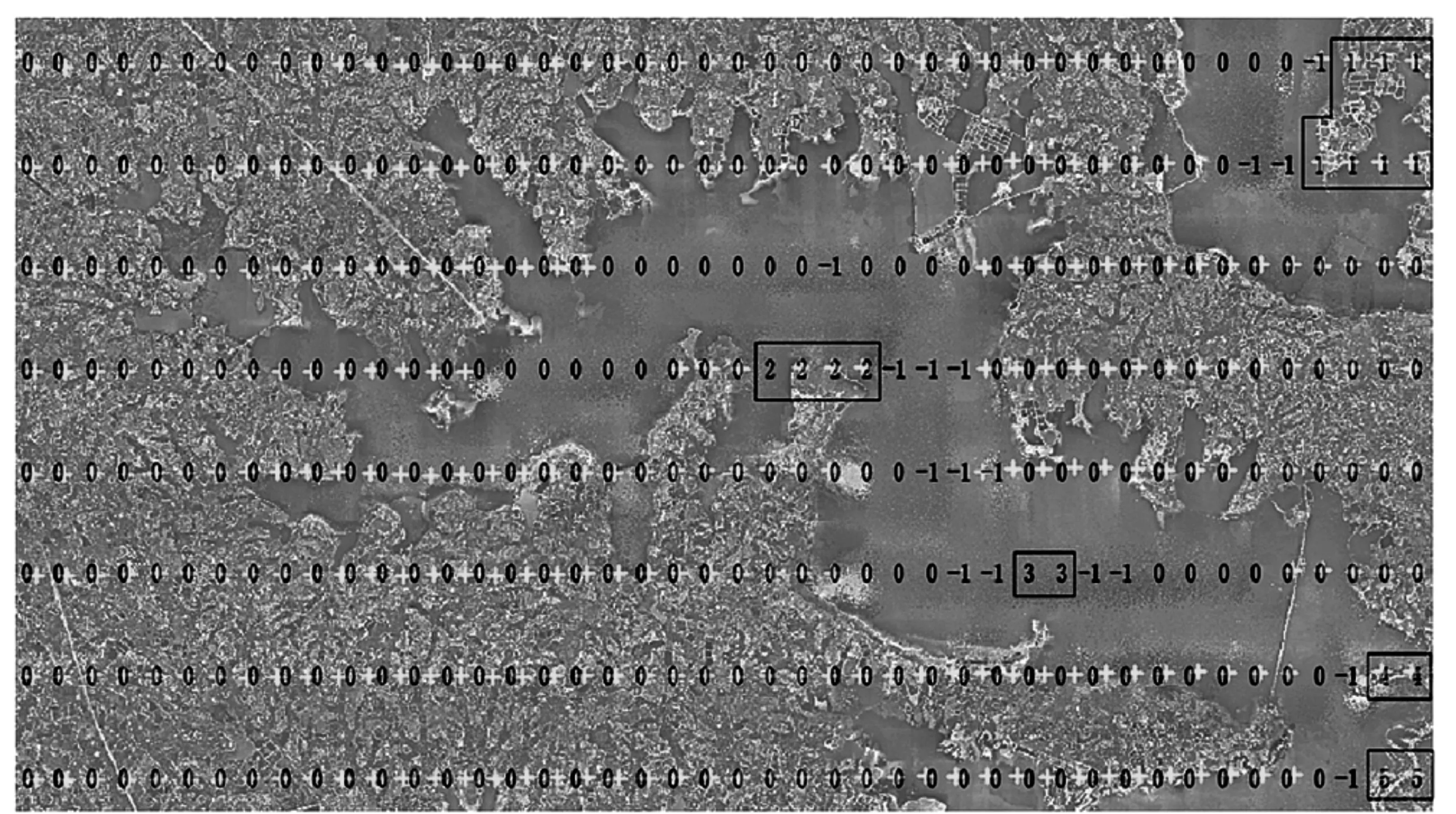
(d=0.072 mm,-1表示落水影像,0~5表示6个连通子测区)图6 分区结果与测区影像对比图
4结论
航空影像落水区域的特点给空中三角测量造成了一定的困难,传统的处理方法大多需要进行人工编辑。本文利用数字图像处理中的连通域标记算法对航空影像落水区域进行自动分区,不仅提高了测区落水影像识别的准确度和分区的自动化程度,而且能够根据不同的精度要求得到相应的分区结果。落水影像的识别和分区结果主要取决于相对定向残差阈值的选择,所设阈值较小时,识别的落水影像较多,且分区更加精细。在阈值确定的情况下,文中两种方法得到的分区结果一致,尽管二次扫描标记算法思路较为复杂,但其空间和时间开销相对较小,其运行速度明显优于区域生长法。
[参考文献]
[1]张剑清,潘励,王树根.摄影测量学[M].武汉:武汉大学出版社,2010.
[2]曹辉.智能空中三角测量中若干关键技术的研究[D].武汉:武汉大学,2013.
[3]张彦峰,艾海滨,杜全叶,等.基于金字塔影像分割的水域提取在海岛礁空中三角测量中的应用[J].测绘通报,2014(12):70-73.
[4]朱道璋,吴定邦.浅谈自动空中三角测量技术在鄱阳湖测图中的应用[J].江西测绘,2008(4):16-17.
[5]王林建,汪建峰,方青.基于线阵影像的海岛(礁)空中三角测量分析处理[J].测绘与空间地理信息,2012,35(12):171-173.
[6]王鑫,姜挺,张宝印,等.海岸带、海岛(礁)数字航空摄影方案优化策略[J].测绘科学技术学报,2011,28(3):190-193.
[7]范业稳.基于DMC的航空摄影测量误差分析和质量控制方法研究[D].武汉:武汉大学,2011.
[8]雷娟.铁路航测中ORIMA空三加密浅析[J].铁道勘察,2012,38(2):13-14.
[9]游薇.基于SSK的SWDC航空影像的空三加密及试验分析[J].测绘与空间地理信息,2013,36(5):208-209.
[10]张云哲,赵海,宋纯贺,等.一种新的连通区域标记算法[J].计算机应用研究,2010(11):35-37.
[11]GRANA C,BORGHESANI D,CUCCHIARA R. Connected Component Labeling Techniques on Modern Architectures[M].Berlin:Springer Berlin Heidelberg,2009:816-824.
[12]张铮,王艳平,薛桂香.数字图像处理与机器视觉——Visual C++与Matlab实现[M].北京:人民邮电出版社,2010.
[13]左飞,万晋森,刘航.数字图像处理原理与实践[M].北京:电子工业出版社,2012.
[责任编辑:谢 平]
Research on automatic partitioning method in aerial triangulation in aerial images about water
LI Neng-neng,KE Tao
(School of Remote Sensing and Information Engineering, Wuhan University, Wuhan 430079, China)
Abstract:In this paper, we used matching points of aerial triangulation to automatically identify images about water, and analyze the connectivity among images in the whole area. Then we divided images into different parts by different connectivity labeling algorithms, and provided the basis for the partition adjustment. Experiments show that using connectivity labeling algorithms to automatically partition aerial images about water in aerial triangulation not only improves the recognition accuracy of water images and automatic level of partitioning, but also obtains the corresponding partition results according to the different precision requirements.
Key words:aerial triangulation;images about water;connectivity labeling algorithm;automatically partition
[中图分类号]P231
[文献标识码]A
作者简介:李能能(1990—),女,河南省济源市人,武汉大学硕士研究生,主要研究方向为航空摄影测量;柯涛(1978—),男,湖北省鄂州市人,武汉大学副教授,博士,主要研究方向为航空摄影测量、近景摄影测量。
基金项目:国家自然科学基金资助项目(41201482)
收稿日期:2015-12-31修回日期:2016-02-25
[文章编号]1673-2944(2016)02-0024-05
