一种多CPS协同机制的设计研究
2016-05-30
(中航工业成都飞机工业(集团)有限责任公司,成都 610092)
CPS研究现状
赛博物理系统又称为信息物理融合系统,这个概念首先是在美国被提出的,2006年底,美国国家科学基金会(National Science Foundation,NSF)宣布该系统为国家科研核心课题。
信息物理融合系统被定义为具备物理输入输出且由可相互作用的元件组成的网络,不同于未联网的独立设备,也不同于没有物理输入输出的单纯的网络,它是一个计算过程与物理过程融合的复杂系统,其通过计算、通信和控制的有机融合与深度协作,实现信息域和物理域的紧密结合[1-2]。
随着新的计算、网络和控制技术的不断涌现,赛博物理系统已成为物理设备系统和互联网相结合的发展的新趋势[3]。赛博物理系统作为计算进程和物理进程的统一体,是集成计算、通信与控制于一体的下一代智能系统。赛博物理系统通过人机交互接口实现和物理进程交互,使用网络化空间远程地、可靠地、实时地、安全地、协作地操控一个物理实体[4-5]。赛博物理系统是将感控、计算和通信与物理对象在网络环境中高度集成的新型智能复杂系统[6]。
目前,赛博物理系统还是一个比较新的研究领域。
文献[7]对赛博物理系统产生背景进行了描述,赛博物理系统是在计算、网络通信技术日趋成熟的背景下得以发展,并提出了赛博物理系统的核心是通信、控制、计算的三者融合。
文献[8]提出了一种CPS系统体系结构设计方法,围绕计算、通信、控制3个要素从系统、功能、技术3个视图进行设计研究。
文献[9]基于SOA的思想提出了一种将CPS系统中软硬件资源整合成服务的形式供各个任务进行调用的体系框架。
文献[10]按照实体到抽象、物理到信息的思想将CPS系统划分为物理层、网络层和应用层,并结合智能交通体系结构对三层结构进行描述,充分体现了CPS系统内部各个层次之间协同合作的特性。
多CPS系统结构
未来的各个智能体应该在现有的单个业务系统上加入智能识别模块,从而升级为带智能Agent服务的业务模块,类似于在局域网中注册一个智能化的消息探头,各个智能体模块至少需要具备两个基本功能,即发送本智能体正在发生的事件以及处理其他智能体发送过来的事件[11-13]。
多CPS系统的智能互联是构成当今物联网的基础[14]。“智能”和“互联”将赋予产品一系列新的功能和能力,从逻辑结构上主要分为4类:监测、控制、优化和自动。
(1)监测:通过传感器和外部数据源,智能互联产品能对系统运行状态和外部环境进行全面监测。在数据的帮助下,一旦环境和运行状态发生变化,系统就会向用户或相关方发出警告。
(2)控制:通过系统内置或云服务中的指令和算法进行远程控制。算法可以让系统对状态和环境的特定变化做出反应。例如当压力过高时,自动关闭阀门,当车库流量达到一定级别时,打开指示灯。
(3)优化:有了丰富的历史数据和实时数据流,就可以用数据分析的方法实现系统自优化,过去由于数据缺失或者积累不够,这些方法大多无法实现。通过对实时数据和历史记录进行挖掘分析,优化系统运行条件,解决和避免系统当前存在的短板问题,从而大幅提高系统的产出比。
(4)自动:将检测、控制和优化功能融合到一起,显著提高系统自动化程度。基于自身运行状态和外部环境进行自适应优化,系统最终将实现完全自动运行。
在物理结构上,多智能体之间的协同类似于现在的局域网部署,有两种结构。
(1)总线型结构:有一个智能体注册及服务处理中心,消息都向中心发送,中心再向其他智能体广播消息。
(2)星型结构:无智能体服务中心,通过广播等手段自动向所有被探知的智能体发送消息。
总线型结构,采取统一注册、统一控制,而星型结构无服务中心,采取自探测、自识别机制。总线型统一控制简化了系统的结构,方便接口设计,易于扩展,同时在系统故障诊断方面具有先天性优势。因此,本文重点研究了总线型结构下多CPS系统协同处理机制[15]。
协同处理功能设计
总线型多CPS系统协同处理模块的关键部分在Agent功能设计,分为Agent客户端和Agent服务端两部分,承担着多个CPS系统与服务端消息的发送、接收和识别功能。功能模块如图1所示,其核心为客户端的消息注册以及服务器端的消息处理。其运行机制如图2所示,其中Agent客户端是各个CPS系统都应具有的消息智能探头,或者可将公用的Agent客户端作为消息探头,完成各个CPS系统与Agent服务中心的CPS系统注册、实时消息发送、接收、识别及处理等功能。Agent服务中心是消息服务中心,完成各个CPS系统的认证、注册、消息的接收、过滤、二次处理及按需转发等基本功能。
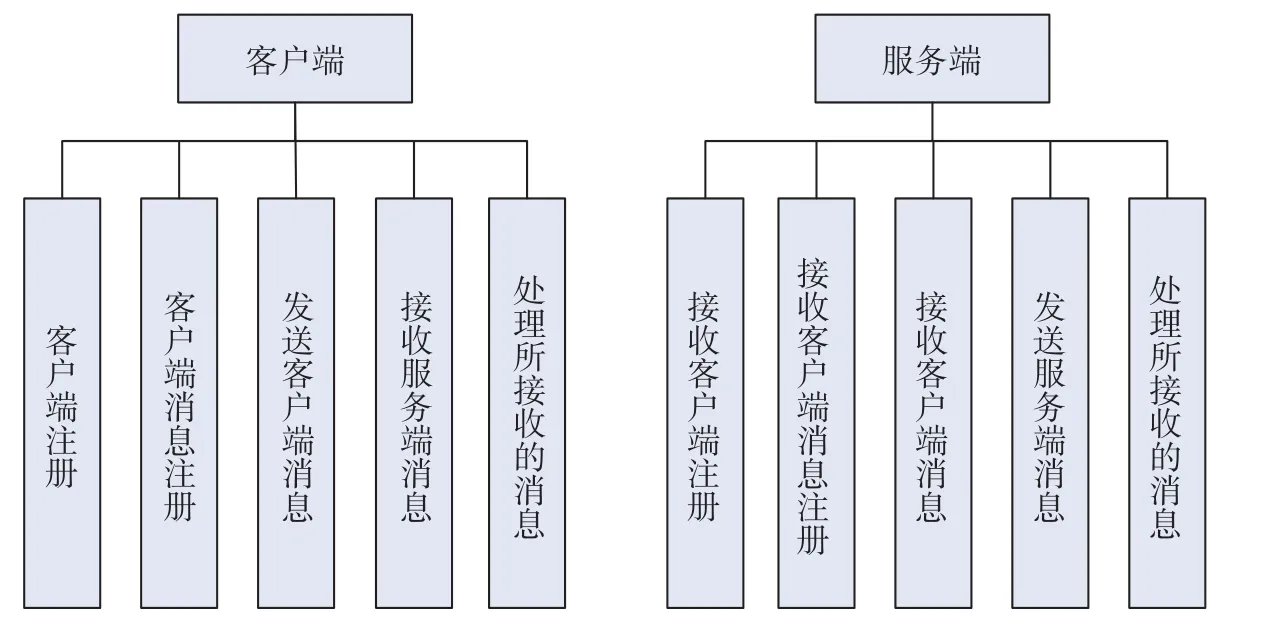
图1 总线型多CPS协同处理模块功能结构Fig.1 Function structure diagram of bus type multi-CPS collaborative processing module
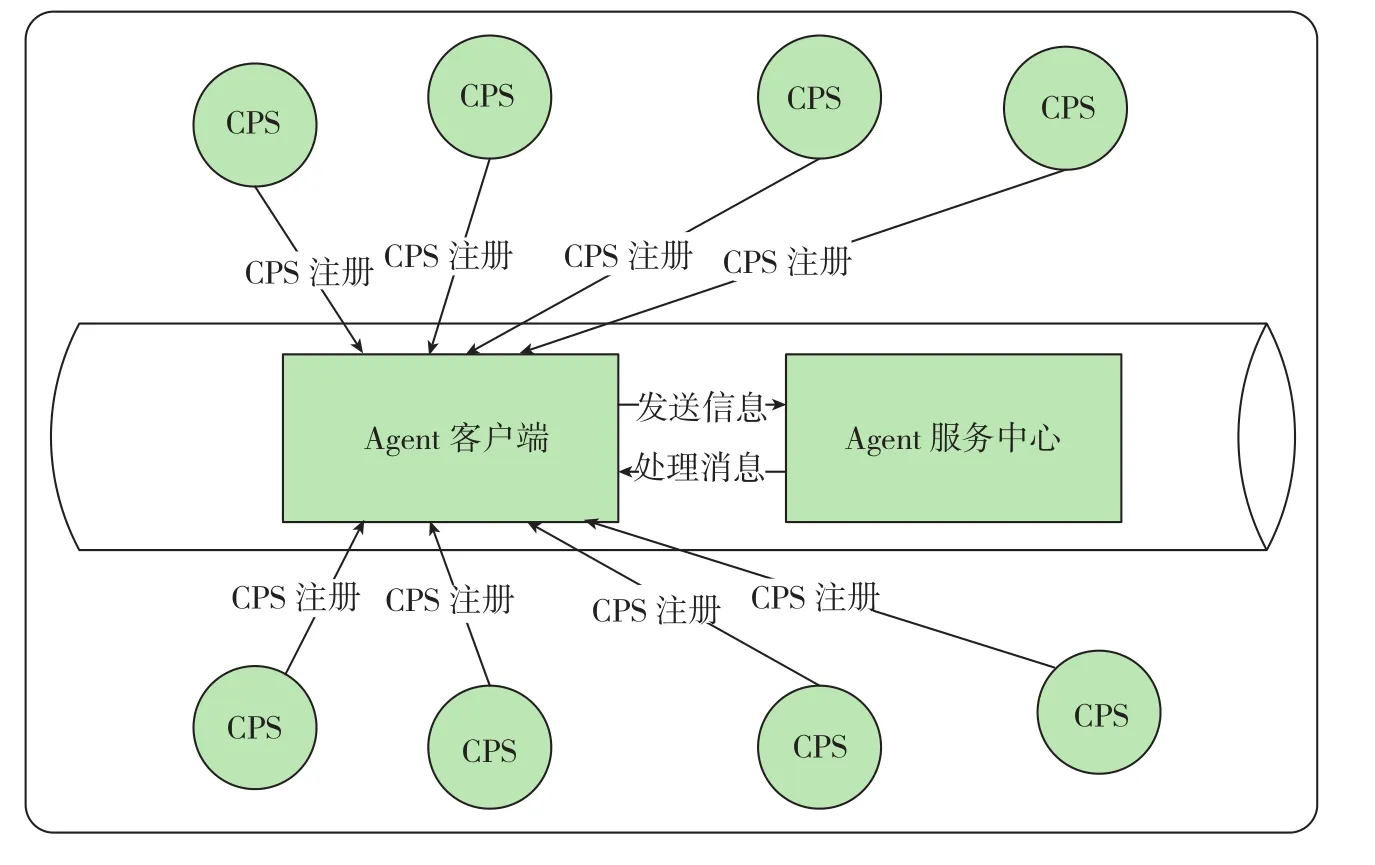
图2 总线型多CPS协同机制运行示意Fig.2 Schematic diagram of bus type multi-CPS collaborative mechanism
1 Agent客户端实现
按照上述设计,客户端主要完成客户端CPS应用注册、所关注的消息类注册、发送客户端事件消息、接受服务器转发过来的感兴趣的消息,最后处理所接受的消息。因此,在客户端实现中,需要一个TIDCPSERVER端口侦听Agent服务中心所转发的消息,同时需要一个IDCPCLIENT,完成与Agent服务中心的连接、注册、发送事件消息[16]。实现上述功能的主要代码如下:
(1)连接Agent服务中心并发送消息。该方法是一个通用方法,供注册等方法调用。TfrmMSGClient.tcpsendandRecvmsg(msg:string;var re cvmsg,sErrmsg:string):BOOLEAN。
(2)调用通用消息发送方法,发起客户端的注册,同时返回本CPS系统的唯一令牌。TfrmMSGClient.ClientRegister(myserverport,mySYSNA ME:STRING):string。
(3)调用通用消息发送方法,发起客户端CPS对感兴趣的消息类注册。TfrmMSGClient.Client Message Register(mytoken:string;recvmsglx:array of string):BOOLEAN。
(4)调用通用消息发送方法,向Agent服务中心发送客户端CPS的各类的事件消息。TfrmMSGClient.sendClientMessage(sendmsglx:string;m ytoken:string;msgContent:string):BOOLE AN。
(5)处理所接受到的Agent服务中心转发过来的感兴趣的消息。TfrmMSGClient.ProcessServerMessage(recvtoken:string;recvmsglx,msg:string):BOOLEAN。
(6)启动侦听服务,以接受Agent服务中心转发过来的所感兴趣的消息并调用消息处理主体。TfrmMSGClient.IdTCPServer1Execute(AThread: TIdPeerThread)。
2 Agent服务中心实现
服务端主要接受来自各个CPS客户端的消息,以实现CPS应用注册、所关注的消息类注册,同时接受客户端的各类消息,并且向各个客户端转发、发送服务端消息。因此,在服务端实现中,需要一个TIDTCPSERVER服务在指定端口以侦听Agent客户端所发送的消息,在接收到消息后,放入到消息队列中,通过一个线程TTransferMsgThread不断取出消息,依据各个CPS客户端已注册的消息类,使用IDTCPCLIENT来连接CPS客户端,实现消息分发到对应的客户端。
如图3所示,将上述功能实现的主要代码如下:
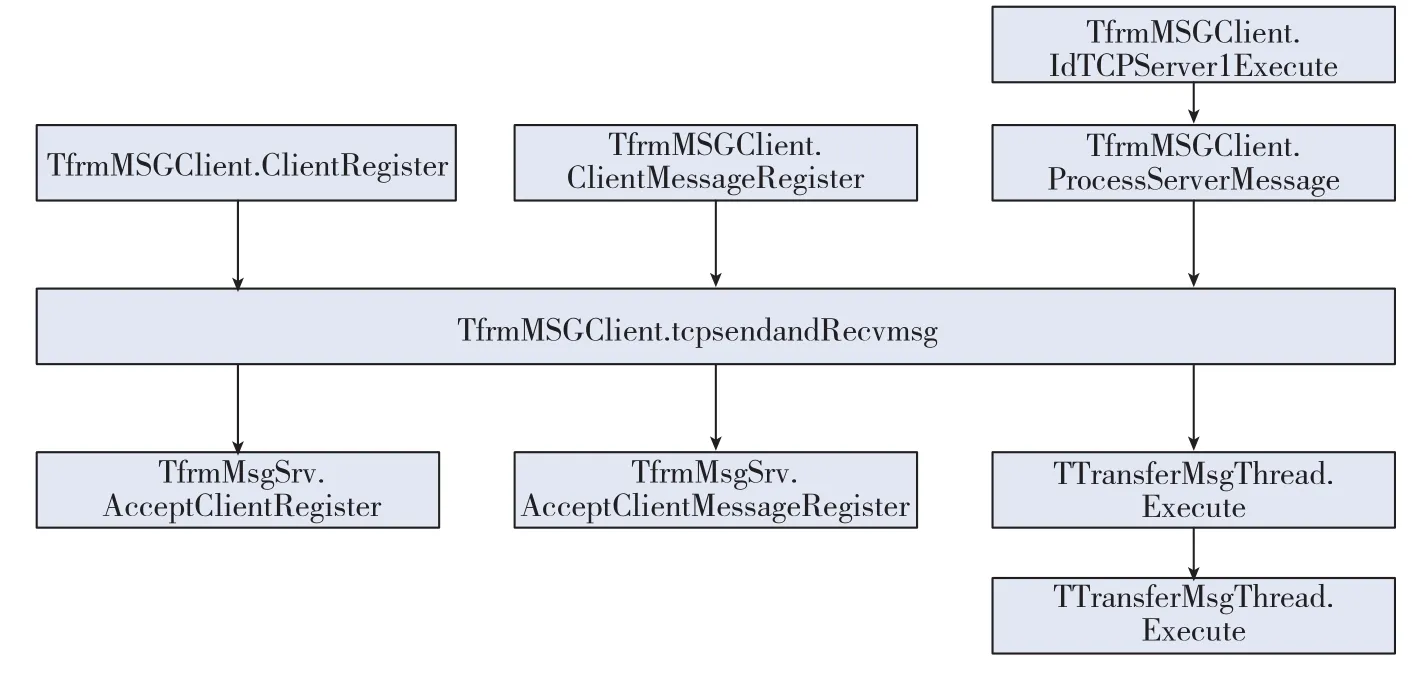
图3 Agent服务中心方法调用关系图Fig.3 Relationship diagram of agent service center method call
(1)接收到各个CPS客户端的消息后,通过该转发线程,执行消息分检及转发。TTransferMsgThread.Execute。
(2)接受CPS客户端注册,并产生客户端实例。TfrmMsgSrv.Accept Client Register(amyip,amyserver port,amySYSNAME:STRING):string。
(3)接收CPS客户端感兴趣的消息类注册。TfrmMsgSrv.Accept Client Message Register(mytoken:string;recvmsglx:string):BOOLEAN。
(4)依据各个客户端注册的消息类,分发待发送消息到各个客户端实例。TfrmMsgSrv.Transfer Client Message(sendtoken,toTo ken:string;sendmsglx:string;msg:string):B OOLEAN。
(5)TCP服务的主体线程代码,接收并处理客户端的所有通信。TfrmMsgSrv.IdTCP Server1 Execute(AThread: TIdPeerThread)。
总线型协同机制验证
在数字化车间中,总线型多CPS协同处理模型将制造车间各个复杂的制造要素接入到车间层的CPS系统中,将整个制造过程显性化,依据该模型能很清晰地知道整个制造过程的瓶颈环节,并进行优化处理。为了方便理解,下面将对制造过程进行简化抽象建模,描述各个智能体之间协作过程及通信原理。
根据CPS协同机制的设计方法和实现技术,下面将以总线型结构来描述中航工业成飞数控厂未来的航空结构件加工应用场景。航空结构件加工车间一般包含有材料站、刀具站、工装库、检验平台、工艺知识库、库房、测量机房、物流调度中心、机床等制造要素。车间所有CPS均已注册,当计划CPS感知到ERP计划出现新的制造需求后,就发送一条新任务的消息到Agent服务中心,服务中心将此消息分发到各个CPS,材料CPS会发送材料的消息,工艺CPS会发送加工程序的消息,设备CPS会发送设备相关状态消息,工装CPS会发送工装状态消息,这些消息通过Agent服务中心消息队列处理后分发出去,当调度CPS接收到各资源状态就绪的消息后,向物流发出加工任务的消息,物流CPS依据该消息去材料站取回原材料及相应资源,并反馈消息,保证各个制造资源及时到位,物流业务完成后发送加工开始的消息,机床CPS收到加工开始的消息后就可以进行加工了。这样通过Agent客户端发送接收业务消息,Agent服务中心处理并分发消息后,实现生产任务开始加工的业务协同工作。
当工人加工完成某个零件某个工序后,机床CPS向Agent服务中心自动发送一条事件信息,告知“某设备已经加工完成了某个质量编号的某工序的零件”,Agent服务中心收到该消息后,向所有注册的CPS广播该消息。
当测量CPS收到消息后,检查FO中测量工艺,发现该工序需要测量,根据目前测量机房资源准备情况自动决策,然后向Agent服务中心自动发送一条事件信息,告知“某设备某个质量编号的某工序的零件需要到某测量机房的某测量机上测量”,Agent服务中心收到该消息后,将向所有CPS广播该消息。
当物流CPS收到测量CPS的消息后,会根据物流资源使用情况以及该质量编号的零件形状大小,自动决策委派某个物流小车去运送零件。同时向Agent服务中心发送“已委派某车辆去某设备上运送零件到某个测量房”的消息。其他CPS收到消息后,若未注册对于该类消息的处理服务,则不对该消息进行处理。机床CPS收到物流智能体及测量CPS的消息后,将等待物流CPS委派的物流小车的到达。
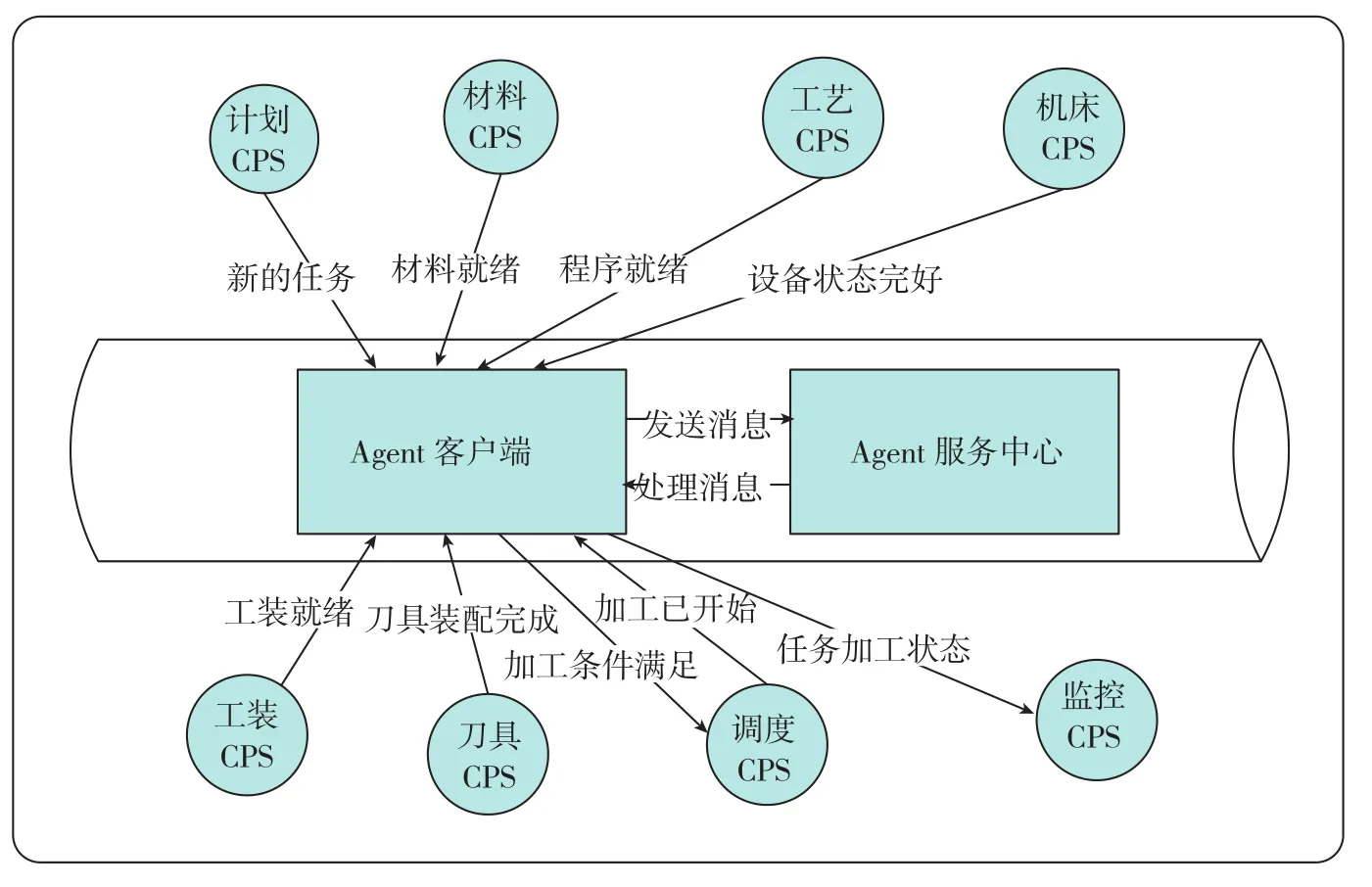
图4 生产任务开始加工的多CPS协同Fig.4 Multi-CPS collaboration of the beginning of production
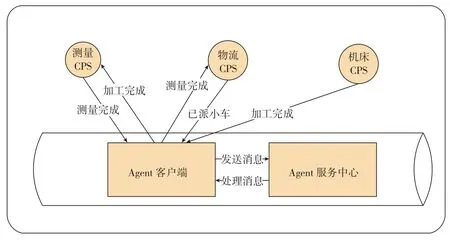
图5 生产物流的多CPS协同Fig.5 Multi-CPS collaboration of production logistics
图4~5是上述应用场景的描绘,各个CPS通过Agent服务中心将云消息广播到各个CPS。
以上场景和技术在中航工业成飞数控厂的各个MES子系统(材料站、物流、刀具、调度)中进行了应用验证,加装该Agent探头的各个CPS子系统已经能够充分实现彼此的互联互通互动,实现从自动协同计划安排、机床加工过程自动监控到加工完成自动物流搬运的数控加工过程全流程协同,证明了设计方法的科学性。相对于传统业务集成的MES子系统,加装了Agent客户端探头的MES子系统的运转效率大大提高,从而提高了生产效率,证明了总线型多CPS协同机制在工程实际应用中的可行性和优越性。
综上,表明未来在CPS的构建上,将采取松散网状结构来实现各个Agent的通信,采取可插拔基于SOA的总体技术架构。在该模式下,各个智能体的消息处理服务同样是可插拔。各个智能体可以相互独立地联入到车间层的CPS系统中,任何一个智能体从CPS系统中去掉不会影响其他智能体的运作;同时各个智能体之间又能通过消息互联互通。
结束语
以VS2010为开发工具,实现了基于TCP/IP模式下的各个CPS系统间的协同关键技术并在MES系统中进行了应用验证。总线结构的多CPS协同机制具有消息动态注册、消息类动态扩展、Agent探头可热插拔等优点,在目前国内外对CPS的研究还停留在理论阶段的现状下具有重大实践意义。
必须指出的是,这是一种通过TCP/IP协议的Agent来实现各个CPS系统间的协同方案,该方案适合支持TCP/IP通信的CPS系统协同,但对有嵌入式系统的CPS不适合。
[1]RAJKUMAR R, LEE I, LUI S, et al.Cyber-physical systems: the next computing revolution[J]. IEEE, 2010:731-736.
[2]周兴社,杨亚磊,杨刚. 信息-物理融合系统动态行为模型构建方法[J]. 计算机学报,2014, 37(6):1411-1423.ZHOU Xingshe, YANG Yalei, YANG Gang. Modeling methods for dynamic behaviors of cyber-physical system[J]. Journal of Computer Science, 2014, 37(6):1411-1423.
[3]谭朋柳,舒坚,吴振华. 一种信息-物理融合系统体系结构[J]. 计算机研究与发展 , 2010, 47(S2):312-316.TAN Pengliu, SHU Jian, WU Zhenhua.A cyber physical fusion system[J]. Journal of Computer Research and Development, 2010, 47(S2):312-316.
[4]LUI S, GOPALAKRISHNAN S,XUE L, et al. Cyber-physical systems: a new frontier[M]//Machine Learning in Cyber Trust.Springer, 2009:3-13.
[5]张彩霞,程良伦,王向东. 基于信息物理融合系统的智能制造架构研究[J]. 计算机科学,2013, 40(S1):37-40.ZHANG Caixia, CHENG Lianglun,WANG Xiangdong. Research on architecture of intelligent manufacturing based on cyberphysical system[J]. Computer Science, 2013,40(S1):37-40.
[6]景博,周伟,黄以锋,等. 信息物理融合系统及其应用[J]. 空军工程大学学报(自然科学版),2014, 15(2):1-6.JING Bo, ZHOU Wei, HUANG Yi Feng,et al. Reserch of cyber-physical systems and its application[J]. Journal of Air Force Engineering University(Natural Science Edition), 2014,15(2):1-6.
[7]林峰, 舒少龙. 赛博物理系统发展综述[J].同济大学学报(自然科学版), 2010,38(8):1243-1248.LIN Feng, SHU Shaolong. A review on cyber-physical systems[J]. Journal of Tongji University (Natural Science), 2010, 38(8):1243-1248.
[8]何明,梁文辉,陈希亮,等. CPS系统体系结构顶层设计研究[J]. 计算机科学,2013,40(11):18-22.HE Ming, LIANG Wenhui, CHEN Xiliang,et al. Research on top level design of architecture for cyber-physical systems[J]. Computer Science,2013, 40(11):18-22.
[9]DILLON T S , ZHUGE H, WU C, et al .Web-of-things framework for cyber-physical systems[J]. Concurrency &Computation Practice & Experience, 2011,23(9):905–923.
[10]陈丽娜, 王小乐, 邓苏. CPS体系结构设计[J]. 计算机科学, 2011, 38(5):295-300.CHEN Lina, WANG Xiaole, DENG Su. CPS system structure design[J]. Computer Science,2011, 38(5):295-300.
[11]OLFATI-SABER R, FAX A,MURRAY R M. Consensus and cooperation in networked multi-agent systems[J]. IEEE, 2007,95(1):215-233.
[12]BONABEAU E. Agent-based modeling: methods and techniques for simulating human systems[J]. Proceedings of the National Academy of Sciences of the United States of America, 2002,99(S3):7280-7287.
[13]FERBER J. Multi-agent systems: an introduction to distributed artificial intelligence[J].Mathematics & Computer Education, 2005,39(1):213-219.
[14]PARKER D C, MANSON S M,JANSSEN M A, et al. Multi-agent systems for the simulation of land-use and land-cover change: a review[J]. Annals of the Association of American Geographers, 2003, 93(2):314–337.
[15]NEDIC A, OZDAGLAR A.Distributed subgradient methods for multi-agent optimization[J]. IEEE Transactions on Automatic Control, 2009,54(1):48-61.
[16]HUNTBACH M M, RINGWOOD G A. Agent-oriented programming[J]. Artificial Intelligent, 1993, 60(1):51-92.
