基于三轴转台的INS/GNSS组合导航半实物仿真系统设计
2016-05-25魏志芳
崔 陆,魏志芳,邓 攀
(中北大学 机电工程学院,山西 太原 030051)
基于三轴转台的INS/GNSS组合导航半实物仿真系统设计
崔陆,魏志芳,邓攀
(中北大学 机电工程学院,山西 太原 030051)
摘要:近年来INS/GNSS组合导航系统的理论研究已趋于成熟,但是对于理论研究的结果却难于验证. 利用高精度的三轴转台完成INS/GNSS组合导航系统半实物仿真试验,对组合导航系统研究的理论与应用具有重要的意义. 采用高速的PCI接口,基于已有的GNSS模拟器、 高精度三轴转台搭建GNSS/IMU组合导航闭环仿真测试系统,以数字信号处理器(DSP)和现场可编程门阵列(FPGA)作输入输出接口处理机,二者以外部存储器(EMIF)接口相联,并采用大容量SDRAM作为存储单元,处理速度快,满足了组合导航半实物仿真系统对主控计算机在数据吞吐和处理能力以及体积、 重量、 功耗诸方面的要求. 介绍了INS/GNSS组合导航系统的基本构成及其研制思路、 构成和半实物仿真系统的工作流程,并给出了INS/GNSS组合导航系统的实验结果.
关键词:惯性导航; 卫星导航; 组合导航; 半实物仿真; 三轴转台
由于INSS/GNSS组合导航系统的捷联导航定位精度远高于单一方式导航定位,因此成为了诸多对导航定位精度有较高要求的各类型设备导航定位技术的主要发展方向之一. 应用具有完全自主性的惯性导航系统和高精度卫星导航系统构成的INS/GNSS组合导航系统,是最具有应用前景的组合导航系统. 目前,INS/GNSS组合导航系统的理论研究已经相对成熟,但由于实验条件的限制,难于对现阶段的理论研究成果进行实践验证,而单纯的数字模拟仿真难以满足INS/GNSS组合导航理论与方法的实践要求. 因此,采用三轴转台试验完成INS/GNSS组合导航系统的半实物仿真试验,对INS/GNSS组合导航研究的理论与应用研究具有重要的意义[1,2].
本文以三轴转台作为惯导平台的运动载体,利用卫星导航信号模拟器作为卫星导航系统的信号源,完成INS/GNSS组合导航半实物仿真系统的设计,给出了半实物仿真系统的工作流程,完成了INS/GNSS组合导航半实物仿真试验.
1基于高精度三轴转台的INS/GNSS组合导航半实物仿真系统的基本构成
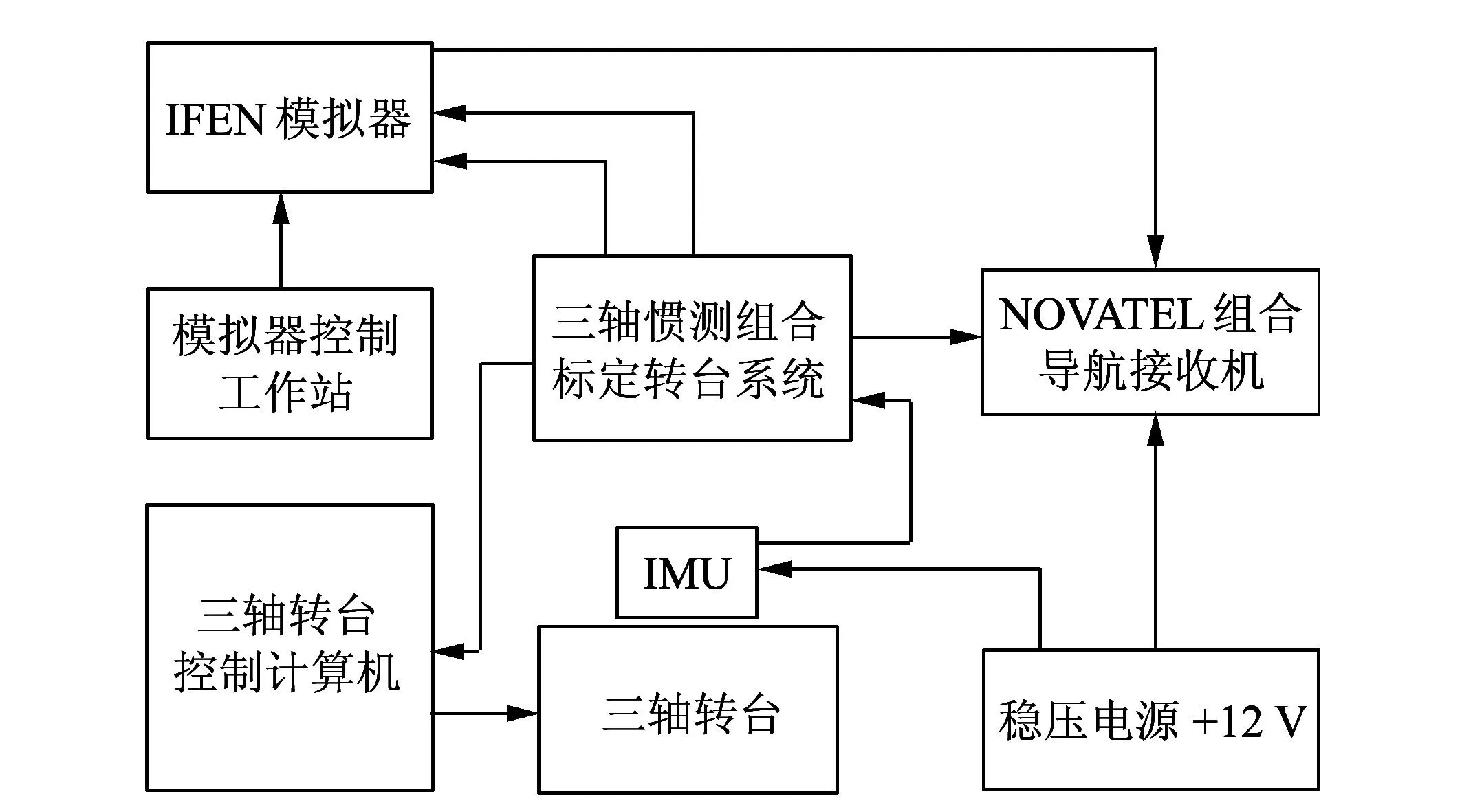
图1 系统的基本构成Fig.1 Basic composition of the system
本系统是基于已有的GNSS模拟器、 高精度三轴转台搭建的一个GNSS/IMU组合导航闭环仿真测试系统. 该系统主要功能用于对INS/GNSS组合导航接收机的实际应用场景进行半实物物理仿真,并能够对INS/GNSS接收机在相应的场景下进行闭环测试.
系统的基本组成如图1 所示. 应用场景信号由IFEN公司NavX-NCS的GNSS模拟器产生,姿态仿真使用的高精度三轴转台为中国航空工业公司北京航空精密机械研究所研制的SGT320E型三轴转台,而IMU加速度采用数仿生成.
半实物仿真系统主要分为以下几个部分:
1) 硬件电路部分: 以FPGA和DSP为核心的数据接收、 处理、 存储、 变换与输出主控系统板卡,实物图见图2:

图2 主控系统板卡Fig.2 Main system control card
2) 硬件设备部分: 中国航空工业公司北京航空精密机械研究所研制的SGT320E型三轴转台及配套转台控制计算机、 iFEN公司研制的NaX-NCS导航信号模拟器、 NoVatel公司研制的SPAN系列组合导航接收机;
3) 软件部分: 基于IMU数据融合板卡平台开发的系统仿真主控系统,基于仿真计算机开发的惯导/加速度数仿软件;
4) 配件部分: 转台与IMU之间的固连结构、 系统初始坐标对准机构、 电源以及各系统硬件接口及配件.
2半实物仿真系统的工作原理
仿真计算机的软件系统包括数仿软件和仿真主控系统两个部分.
数仿软件主要完成载体动力学仿真,输出载体姿态、 位置、 速度等惯性导航、 加速度信息,并以数据文件的形式保存,方便后续多次使用[6,7].
仿真主控系统是该系统的核心控制模块,它在运行中需要实时发送对iFEN模拟器、 三轴转台的控制信号,同时从IMU模块接收原始测量数据,并与数仿软件生成的加速度数据进行融合,输出至组合导航系统[8].
系统在运行中,要求模拟器与转台保持严格的同步关系,同时也要求IMU原始测量数据与加速度数据间保持同步关系. 模拟器在运行中,通过后面板BNC接口输出1 PPS秒脉冲信号,主控软件收到此脉冲信号后产生中断,主控软件以此时刻为分别产生20 PPS,100 PPS的均匀时间间隔分别触发不同的DSP中断.
根据转台技术文件,该型号转台最大数据更新率可达1 kHz,因此设计对转台的控制频率为20 Hz. 在20 PPS中断时,主控软件发送转台控制命令,控制转台的各轴按要求进行转动.
在惯性解算数据融合模式下,在100PPS中断时,主控软件将该时刻的惯性结算数据与对应时标的加速度数据进行融合,形成数据帧,通过相应的数据接口发送至组合导航系统.
IMU数据融合板与组合导航机的接口需要兼容INS/GNSS组合导航接收机的IMU接口.
3系统模块设计
3.1数仿软件设计
数仿软件需要产生提供给模拟器的航迹信息文件、 提供给主控软件的用于控制转台的转台控制命令数据文件以及融合模式下IMU数据需要的融合加速度数据文件. 因此数仿软件将基于STK软件与C++语言进行二次设计研发,包括运动模型控制模块、 姿态建模、 飞行姿态数据生成模块、 航迹数据生成模块以及加速度数仿模块[3].
3.2仿真主控系统设计
3.2.1系统工作流程
仿真主控系统是该系统的核心控制模块,系统在运行中,要求模拟器与转台间保持严格的同步关系,同时也要求IMU原始测量数据与加速度数据间保持同步关系.
仿真主控系统的工作流程如图3 所示.
3.2.2系统同步控制模块设计
为了保证系统在工作中个部分仿真数据时间严格的同步关系,需要从硬件板卡及主控软件两方面设计系统同步控制模块.
1) 模拟器与三轴转台同步控制模块
在半实物仿真中,要求模拟器产生的导航信号与IMU所测得的三轴姿态信息在时间域和空间域同步,才能保证被测GNSS/INS组合导航接收机正常工作. 因此要求模拟器导航信号产生起始时刻与转台控制信号起始时刻严格同步[9,10].
为了避免硬件处理转发数据产生的延时,本模块先将需要发送给转台的控制命令帧提前存储到大容量SDRAM中. 当系统开始运行时,直接由DSP读取命令帧并发送给三轴转台,从而消除硬件延迟. 同时为了保证模拟器轨迹信号产生时刻与三轴转台转动时刻同步,本模块利用触发信号启动模拟器. 当上位机控制软件发送运行命令时,控制系统产生一个触发脉冲信号用以触发模拟器开始运行,同时此信号也作为能使DSP读取并转发转台控制命令帧的信号. 从而实现了模拟器信号与转台位置控制指令发送的同步.

图3 仿真主控系统工作流程Fig.3 The workfloe of The simulation control system
2) IMU实测数据与GNSS/INS组合导航接收机接收端实时同步模块
GNSS/INS组合导航接收机在接收IMU惯导数据时必须通过一个100 PPS的脉冲信号来控制,即每当被测GNSS/INS组合导航接收机接受到一个100 PPS脉冲上升沿,它将在500 μs之内开始接收数据,如果在该上升沿延时500 μs之内没有接收到任何数据则视为接收数据失败. 同时,IMU设备发出的数据还需要进入硬件控制系统进行部分数据替换融合的操作,而替换融合后的IMU数据与GNSS/INS组合导航接收机接收数据触发信号(100 PPS脉冲信号)延时必须小于500 μs才能被GNSS/INS组合导航接收机准确接收,因此IMU设备发送的测得数据与被测GNSS/INS组合导航接收机接收端的实时同步就显得尤为必要.
在本模块内,控制系统首先接收到IMU设备输出的100 PPS脉冲信号,然后同步产生新的用于发送给GNSS/INS组合导航接收机的100 PPS脉冲信号; 同时,基于高性能的DSP芯片,本模块开始进行IMU数据替换融合处理,从而保证融合处理后的数据与接收数据触发脉冲(100 PPS脉冲信号)之间的延时小于120 μs,硬件系统处理信号所产生的延时降低到对结果影响可以忽略不记的范围内,从而满足被测GNSS/INS组合导航接收机的指标要求[4,5]
4系统实测实验结果
4.1运动模型

图4 STK运动轨迹模型Fig.4 The model of STK motion trail
4.2运动参数

表1 STK运动轨迹参数
4.3实验结果
4.3.1姿态角分析
图5~图7 分别为X轴(转台内轴),Y轴(转台中轴),Z轴(转台外轴)的运动角度,1号线为转台实际角运动,为转台测量值,2号线为IMU积分后的角运动,为IMU测量值,3号线为基于STK模型下的角度运动,为数仿理想值(即真值).
从图5~图7 可以看出STK数据和转台实际运动数据重合度较高,即转台控制较理想.
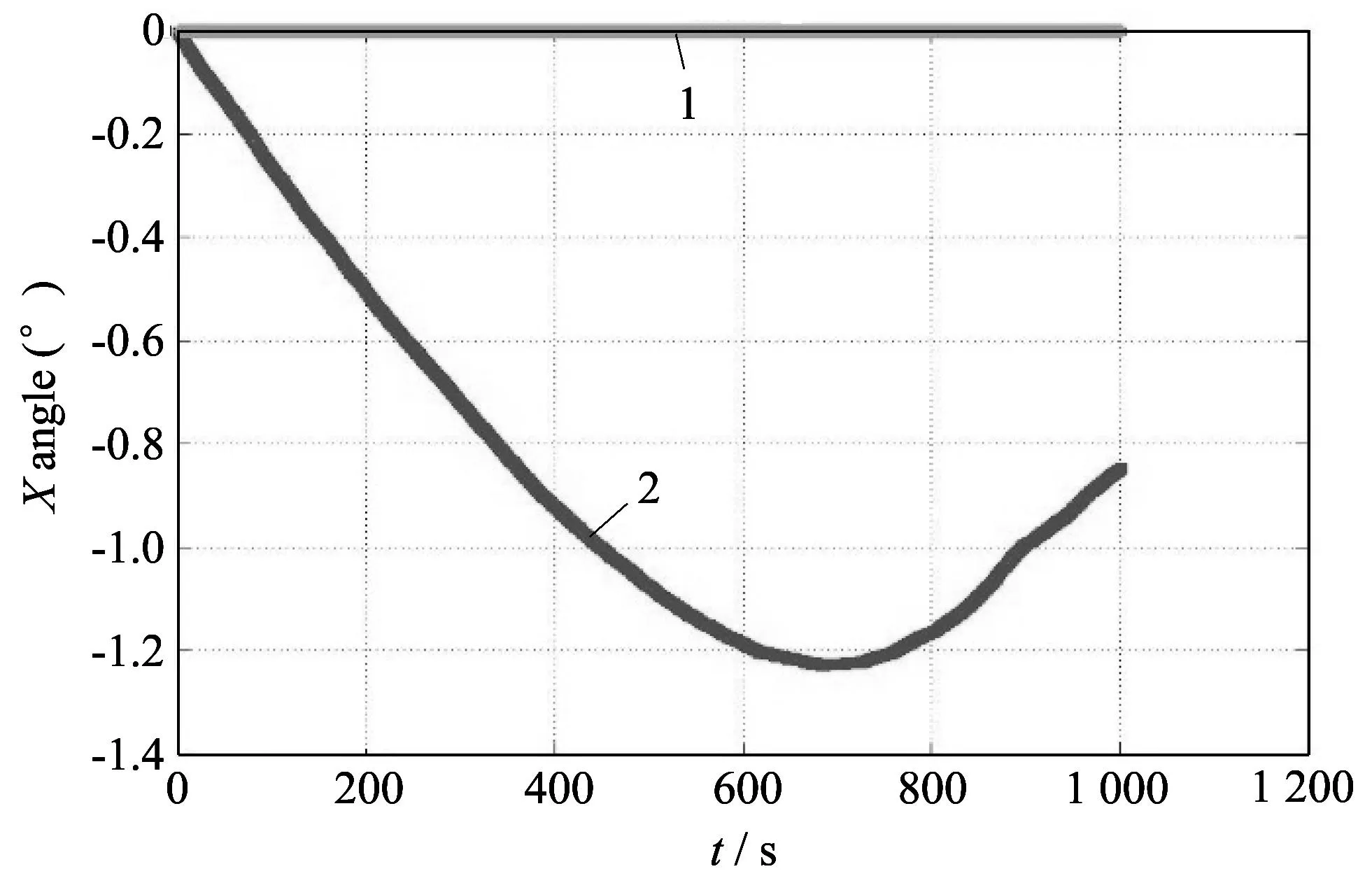
图5 X轴(俯仰角)角运动Fig.5 The motion of X axis (pitching Angle) angular

图6 Y轴(滚转角)角运动Fig.6 The motion of Y axis (roll Angle)

图7 Z轴(航向角)角运动Fig.7 The motion of Z axis (course Angle)

图8 IMU相对STK真值的角度误差Fig.8 Angular error between IMU and STK
4.3.2角度误差分析
图8 为IMU测量值相对STK真值的绝对误差,X,Y,Z轴误差期望分别为: 0.852 8,1.028 6,3.617 6(单位: (°)); 标准差为: 0.351 1,0.489 9,2.225 1 (单位: (°)),IMU实测Bias Offset(偏置误差)为: 12.686°/hr,IMU手册性能指标Bias Offset为: 20°/hr.
图9 为转台测量值相对STK真值的绝对误差.X,Y,Z轴误差期望分别为: 0,0.000 05,0.000 4(单位: (°)); 标准差为: 0,0.000 09,0.000 5(单位: (°)).
图10 为IMU测量值相对转台测量值的绝对误差.X,Y,Z轴误差期望分别为: 0.852 8,1.028 6,3.618 1 (单位: (°)); 标准差为: 0.351 1,2.225 3IMU实测Bias Offset(偏置误差)为: 12.836°/hr,IMU手册性能指标Bias Offset为: 20°/hr.

图9 转台相对STK真值的角度误差Fig.9 Angular error between Turntable and STK

图10 IMU相对转台运动的角度误差Fig.10 Angular error between IMU and turntable
5结论
5.1实验结论
1) 从图9中曲线得出转台数据和STK数据几乎重合,误差在0.0001数量级,在转台误差范围内,由此认为转台控制正确实现;
2)由于IMU自身的零偏存在,所以IMU的数据误差相对转台的误差较大,偏置量大小在IMU性能指标偏置量的范围之内,即认为当前IMU的误差在是合理存在的;
3) IMU的零偏,随着测试时间的增加,IMU积分所得到的角度的误差变化不定;
4) 转台误差为5″,转台运动变化量为3.1833″.
5.2性能分析
1) 系统满足了IMU更新速率最高100Hz要求,并根据实际被测设备实现IMU速率5~100 Hz可调;
2) IMU数据融合板卡与GNSS模拟器的场景时间同步经度5 ms;
3) 对转台的控制经度0.001°;
4) 载体数仿加速度经度偏差绝对值不大于1 mg,加速度数仿偏差稳定性绝对值不大于0.5 mg;
5) 仿真计算机测算的INS/GNSS接收机(采用NovAtel公司的SPAN-CPT组合导航接收机)测试结果与设定的运动载体定位误差不高于2 m(3DRMS),姿态误差不高于0.05°,测速精度不低于0.01 m/s.
6结语
本系统很好地实现了以下功能:
1) 组合导航闭环仿真软件能够建立载体运动力学模型,完成载体动力学仿真,输出载体姿态、 位置、 速度等惯性导航(INS)信息,实时驱动三轴转台;
2) 建立GPS与INS之间的系统交联,实现数据通信和时间同步;
3) 仿真软件能够实时驱动三轴转台模拟载体的姿态、 转速,模拟加速度计输出,并能同时驱动GPS模拟器输出与INS同步的GPS信号.
在多次实验中,INS/GNSS组合导航系统误差处于不断积累中,并随转台运动而表现出不同的趋势. 而半实物仿真系统的误差一直稳定在一个较小的区域内. 因此,INS/GNSS组合导航半实物仿真系统真实有效地再现了惯性系统的误差积累,其结果验证了理论方法的正确性,同时为INS/GNSS组合导航系统的应用起到了有意义的借鉴作用.
参考文献:
[1]张国良,陈坚,曾静. 惯性/卫星组合导航半实物仿真系统设计[J]. 导弹与航天运载技术,2007(5): 20-24.
Zhang Guoliang, Chen Jian, Zeng Jing. Design of INS/GNSS integrated navigation hardware-in-the-loop simulation system[J]. Missile and Space Vehcile, 2007(5): 20-24. (in Chinese)
[2]徐博单,家元. 五轴电动转台控制系统设计[J]. 系统仿真学报, 2008(10): 2557-2559.
Xu Bodan, Jia Yuan. Design of control system of five-axis electric-driven flight turntable[J]. Journal of System Simulation, 2008(10): 2557-2559. (in Chinese)
[3]高宁军,张安民,陈春鹏. 飞行器半实物仿真系统过程控制软件设计[J]. 计算机应用(增刊),2010(30): 274-277.
Gao Ningjun, Zhang Anmin, Chen Chunpeng. Process control software design for aircraft in hardware-in-the-loop simulation system[J]. Journal of Computer Applications,2010(30): 274-277. (in Chinese)
[4]何广军,李保全,马计房. SINS/GPS组合导航的半实物仿真实验系统设计[J]. 计算机仿真,2006(23): 18-21.
He Guangjun, Li Baoquan, Ma Jifang. Development of hardware-in-the-loop simulation of SINS/GPS integrated navigation system[J]. Computer Simulation, 2006(23): 18-21. (in Chinese)
[5]李涛,武元新,薛祖瑞,等. 捷联惯性导航系统误差模型综述[J]. 中国惯性技术学报,2003(11): 351-358.
Li Tao, Wu Yuanxin, Xue Zurui, et al. Survey on error models of strapdown inertial navigation system[J]. Journal of Chinese Inertial Technology, 2003(11): 351-358. (in Chinese)
[6]Britting K R. Inertial navigation system analysis[M]. New York: Wiley Interscience,1971.
[7]Goshen-Meskin D, Bar-itzhack I Y. Unified approach to inertial navigation system error modeling[J]. Journal of GCD,1992, 15(3): 648-653.
[8]Doh Young Chung, Jang Gyu Lee, Chan Gook Park. Strapdown INS error model for multiposition alignment[J]. IEEE Transactions on Aerospace and Electronic Systems,1996, 32(4): 1362-1366.
[9]Shibata M. Error analysis strapdown inertial navigation using quaternions[J]. Journal of GCD, 1986, 9(3): 379-381.
[10]Archal G. Error equations of inertial navigation[J]. Journal of GCD,1987, 10(4): 351-358.
Design of INS/GNSS Integrated Navigation Hardware-in-the-Loop Simulation System Based on the Three-Axis Turntable
CUI Lu, WEI Zhifang, DENG Pan
(College of Mechatronic Engineering, North University of China, Taiyuan 030051, China)
Abstract:In recent years the study of the theory of the INS/GNSS integrated navigation system has been mature, but the results of the theoretical research are difficult to verify.Utilizing the high-accuracy-three-axis turntable to complete the INS/GNSS Integrated Navigation Semi-physical simulation is important to the theory and application on the research of integrated navigation. INS/GNSS integrated navigation hardware-in-the-loop simulation system with high speed PCI interface is based on the existing GNSS simulator, high precision Three-axis Turntable, A digital signal processor (DSP) and field programmable gate array (FPGA) which is connected with the external memory interface (EMIF) are used as the input and output interface processor.The using of large capacity SDRAM as storage unit lead to high processing speed,and the requirements of the main control computer in data throughput and processing capacity, volume, weight and power consumption are met.The basic composition of INS/GNSS integrated navigation system is presented, the idea and constitution of the INS/GNSS integrated navigation and the working process of the hardware-in-the-loop simulation system is described, the experiment results of INS/GNSS integrated navigation system is also given.
Key words:inertial navigation; satellite navigation; integrated navigation; hardware-in-the-loop simulation; three-axis turntable
中图分类号:TJ765.4
文献标识码:A
doi:10.3969/j.issn.1671-7449.2016.02.010
作者简介:崔陆(1989-),男,硕士,主要从事闭环半实物实时仿真系统研究.
收稿日期:2015-08-09
文章编号:1671-7449(2016)02-0149-07