车辆磁流变半主动座椅悬架的研制
2016-05-20寇发荣西安科技大学机械工程学院西安710054
寇发荣(西安科技大学 机械工程学院,西安 710054)
车辆磁流变半主动座椅悬架的研制
寇发荣(西安科技大学 机械工程学院,西安710054)
摘要:为了提高车辆驾驶员的乘坐舒适性,研制了一种基于磁流变减振器的半主动座椅悬架。分析了磁流变减振器基本原理和力学模型,建立了车辆半主动座椅悬架动力学模型,设计了用于座椅半主动悬架的模糊控制策略,并在正弦激励输入下进行了模糊控制仿真计算,试制了座椅用磁流变减振器物理样机及试验台架系统,开展了磁流变减振器阻尼特性试验和磁流变半主动座椅悬架台架试验研究。结果表明,理论仿真和试验结果基本吻合,磁流变减振器阻尼可控性好,所研制的磁流变半主动座椅悬架明显减小了座椅振动。
关键词:磁流变减振器;半主动控制;座椅悬架;模糊控制;台架试验
汽车驾驶员长时间暴露在足够强度的振动下,会增加他们的疲劳感觉,从而降低驾驶员的操作准确和工作效率,从而影响汽车驾驶的安全性。汽车座椅悬架通常是采用被动悬架,其阻尼和刚度系数不能随着汽车的工作工况改变而进行调节,使其减振性能受到极大限制。为了对车厢地板所产生的振动进行有效地减振,采用可控座椅悬架进行减振是解决这一问题的有效方法[1-5]。
可控座椅悬架根据是否提供动力源及调节对象的不同,又可分为主动座椅悬架和半主动座椅悬架。半主动座椅悬架介于主动座椅悬架和被动座椅悬架之间,悬架参数可在一定范围内进行实时调节,从而获得最佳的座椅悬架综合性能。目前,采用磁流变液制成的磁流变减振器是一种性能较好的半主动控制装置,其能量消耗小、结构简单、响应快、动态范围大、可靠性好、适应性强[6-9],特别适合在座椅上使用[10]。
本文在对汽车座椅悬架和磁流变减振器进行理论分析的基础上,设计并试制了一种座椅用单出杆式磁流变减振器,研制开发了基于磁流变减振器的汽车座椅悬架系统,并开展了座椅台架试验研究。
1磁流变液减振器的力学模型
1.1单出杆式磁流变液减振器的原理
磁流变液减振器结构上由缸体、活塞、磁流变液、线圈、密封圈、导向盘、气室、线圈引线等组成。活塞上带有节流孔,在节流孔周围设计有能产生强磁场的线圈绕组,如图1所示。
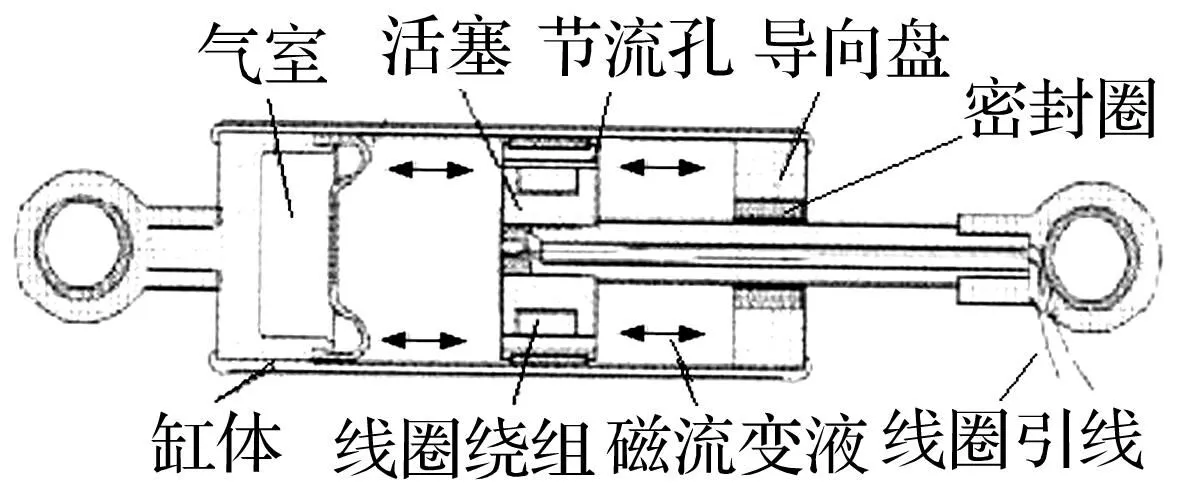
图1 磁流变减振器的基本结构Fig.1 The structure of magneto-rheological damper
当磁流变减振器安装在座椅悬架中工作时,磁流变减振器的活塞在其缸体内作往复直线运动。安装在座椅悬架上的控制器,就会根据磁流变减振器活塞的实时位置所反馈回的信号,经过一定控制律计算,发出特定的减振器电流驱动控制指令,通过线圈绕组建立强磁场,使得磁流变液中的铁磁性颗粒在节流孔之间形成一个“链”,从而改变了磁流变液的表面粘度,控制了磁流变液在节流孔通道中的流动特性,改变了磁流变减振器活塞左、右工作腔间的压力差,从而实现磁流变减振器的阻尼力调节[11-12],如图2所示。
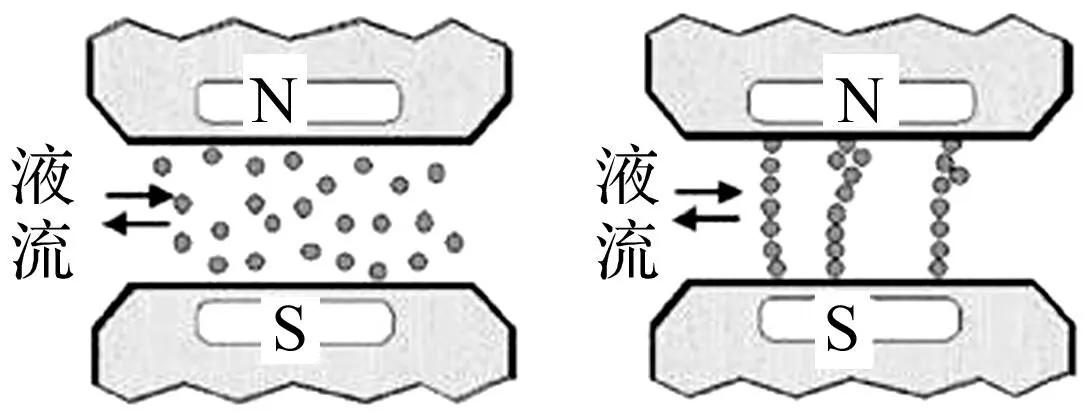
图2 磁流变液在磁场中的分布变化Fig.2 The distribution change of magneto-rheological fluid
1.2磁流变液减振器的力学模型
本研究采用简化的Bouc-Wen微分模型[13-14]。该模型具有涉及参数少、数学表达式简单、参数识别容易的优点。图3为该磁流变减振器的Bouc-Wen微分模型基本构架,其中滞回装置输出力u由三部分组成,分别由系统滞回系数、刚度系数和黏性系数产生。
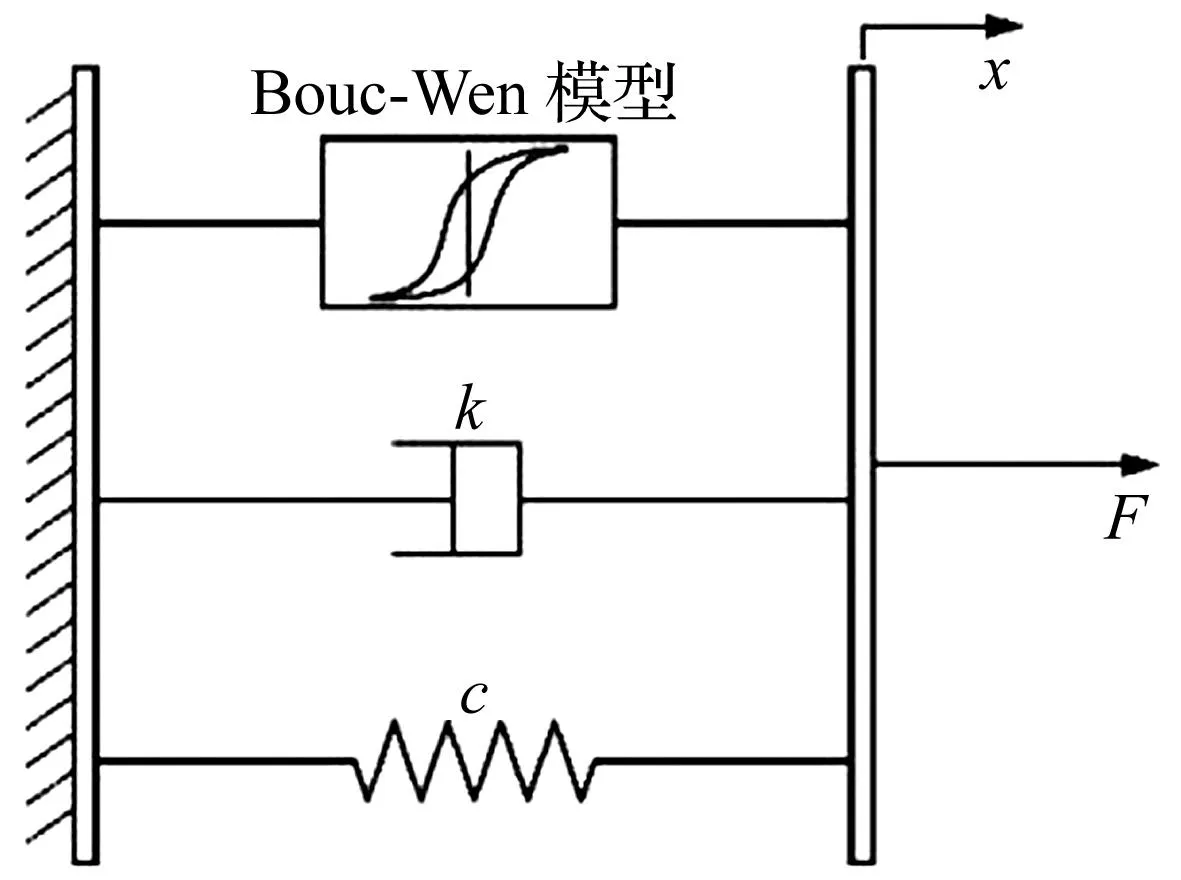
图3 Bouc-Wen模型示意图Fig.3 The diagram of Bouc-Wen model
假设滞回系统为一阻尼器装置,那么由该装置所产生的简化阻尼力可由下式表示:

(1)
(2)

在Bouc-Wen微分模型中,黏性系数c、 刚度系数k是最主要的描述磁流变阻尼器力学性能的参数,滞回环形状控制系数A主要控制滞回环的形状。参数c一般与速度有关,其值取决于阻尼力-速度曲线的平均斜率。
2车辆半主动座椅悬架动力学模型的建立
本文主要研究座椅悬架本身的特性,忽略了悬架等影响,建立了“人-椅”二自由度座椅悬架动力学模型,如图4所示。与复杂的全车模型比较,具有涉及参数最少、简化系统输入、容易理解设计与性能之间的关系等优点。

图4 二自由度座椅悬架动力学模型Fig.4 Two degrees of freedom dynamic model for seat suspension
根据图4中座椅悬架力学模型,利用牛顿运动定律,得到方程组(3):
(3)
取状态向量和输出向量分别为:

由此,可得到悬架的状态方程如下:
(4)
式中,A、B、C、D分别表示状态矩阵、输入矩阵、输出矩阵、传递矩阵。当控制输入u为0时,即变为被动座椅悬架形式。
3磁流变半主动座椅悬架模糊控制仿真
3.1半主动座椅悬架模糊控制器的设计
模糊控制方法具有很强的鲁棒性,适用于存在非线性、时变性、强耦合、大迟滞的系统,也适合难以建立精确模型的系统。兼顾悬架控制实现的快速性和简易性,设计了二维模糊控制器[15],其结构形式如图5所示。
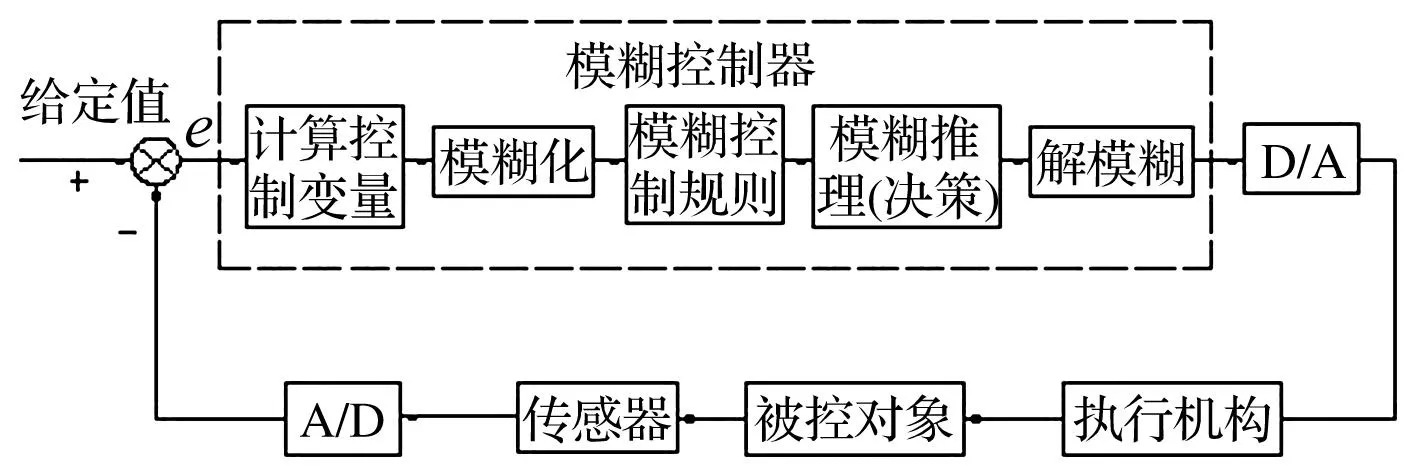
图5 模糊控制器原理Fig.5 The principle of fuzzy controller

在模糊控制系统中,把输入变量误差E及其变化率EC及输出的实际范围称为这些变量的基本论域。本文中取两个输入论域分别为[-6, 6]和[-6, 6],模糊输出的基本论域为[-6,6] 。模糊变量E、EC和I的模糊词集和论域确定后,需对模糊语言变量确定隶属函数,即所谓对模糊变量赋值,它们是根据实际具体情况确定的。
利用MATLAB中模糊推理系统中的图形界面对模糊系统的高层属性进行修改和编辑,最终得到半主动座椅悬架模糊推理系统的输入输出曲面,如图6所示。

图6 模糊推理系统的输入输出曲面Fig.6 Input and output surface for fuzzy inference system
3.2半主动座椅悬架模糊控制仿真分析
路面输入为振幅为5 mm、输入频率分别为3 Hz、4 Hz时的正弦输入座椅响应特性,如图7、图8所示。

图7 振幅为0.005 m、 3 Hz正弦激励下座椅响应特性Fig.7 Seat response under sine excitation of 0.005 m amplitude and 3 Hz frequency
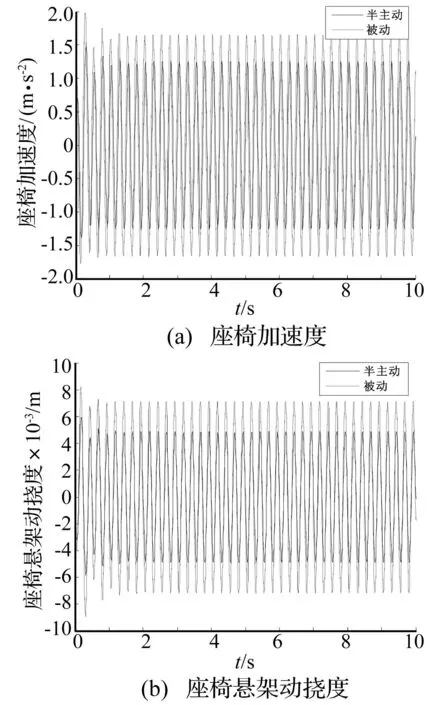
图8 振幅为0.005 m、 4 Hz正弦激励下座椅响应特性Fig.8 Seat response under sine excitation of 0.005 m amplitude and 4 Hz frequency
表1和表2中分别给出了振幅为0.005 m的正弦模拟路面下座椅性能指标的均方根值。

表1 3 Hz正弦激励下座椅性能的均方根值

表2 4 Hz正弦激励下座椅性能的均方根值
4座椅用磁流变减振器的阻尼特性试验
按照《QC/T491-1999 汽车筒式减振器尺寸系列及技术条件》标准,确定了磁流变减振器的相关参数,设计试制了座椅悬架用磁流变减振器,实物样机如图9所示。

图9 所研制的座椅悬架磁流变减振器Fig.9 The developed seat suspension with magneto-rheological fluid damper
该减振器器内部充满了磁流变液,缸外径为45 mm,活塞杆直径为13 mm,活塞上安装线圈,线圈的引线经活塞杆上的内孔引出。活塞杆可移动行程为30 mm。该减振器的最大拉伸力约为800 N,控制磁场强度所允许的最大输入可控电流为2 A。采用美国MTS公司生产的结构拉压力性能测试系统,进行了磁流变减振器的阻尼特性试验,如图10所示。

图10 磁流变减振器特性试验Fig.10 Test bench of magneto-rheological damper
通过台架实验特性试验,分别获得了座椅悬架用磁流变减振器的阻尼力与活塞位移的关系曲线、阻尼力与活塞速度的关系曲线,如图11和图12所示。

图11 不同控制电流的阻尼力-位移曲线Fig.11 Damping force-displacement curve for different control current
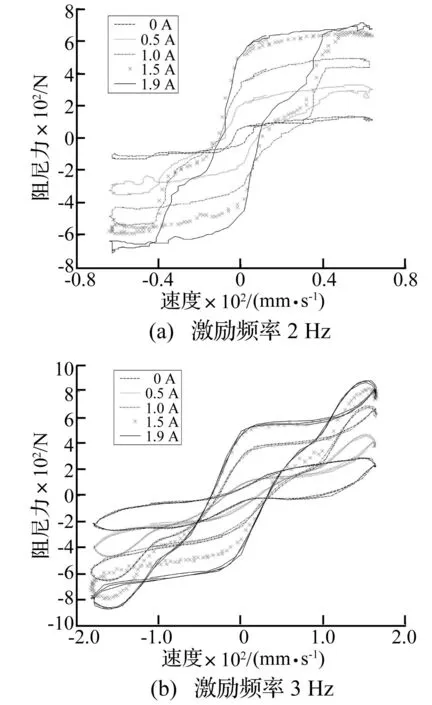
图12 不同控制电流的阻尼力-速度曲线Fig.12 Damping force-speed curve for different control current
从图11(a)、(b)结果看出,该磁流变减振器的阻尼力-活塞位移曲线比较饱满,衰减振动与耗能效果良好;在一定的激振振幅和激振频率的正弦输入下, 该磁流变减振器阻尼力大小随着控制电流的增大而增大。
从图12(a)、(b)结果看出,阻尼力伴随着减振器速度的增加而增加, 在速度正负区成分段线性分布,这与磁流变减振器的阻尼力是由黏滞阻尼力和可控阻尼力两部分组成是吻合的。磁流变阻尼器的阻尼力-速度曲线具有明显的滞回特性。
5磁流变半主动座椅悬架系统的台架试验
在完成上述磁流变半主动座椅悬架理论仿真和磁流变减振器阻尼特性试验的基础上,利用汽车悬架座椅振动试验台开展了磁流变半主动座椅悬架系统的台架试验研究。
5.1半主动座椅悬架样机试制
本研究中所使用的座椅样机是在原有汽车驾驶员座椅基础上,经过改进设计试制完成,并开展了台架试验研究,如图13所示。
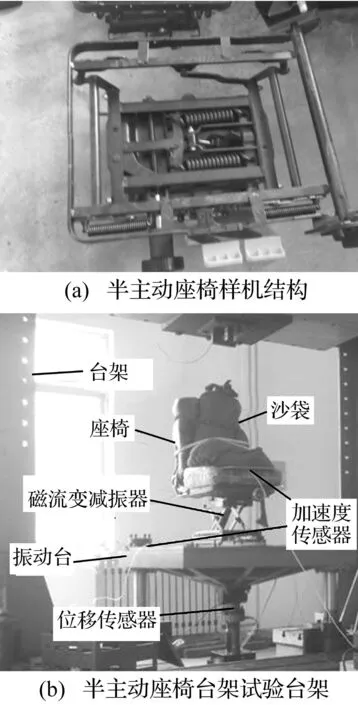
图13 磁流变半主动座椅悬架试验系统Fig.13 Test system of semi-active seat suspension with magneto-rheological damper
5.2半主动座椅悬架样机台架试验
在上述的座椅试验台架上,加载振幅为0.005 m、不同输入频率的正弦模拟路面激励,利用DEWETRON公司的DEWE3010-REC-SPEC型16通道数据采集系统进行了试验数据采集和分析,其结果如图14所示。

图14 振幅为0.005 m正弦激励下座椅响应特性Fig.14 Seat response under sine excitation of amplitude 0.005 m
图14和表3的试验结果表明,模糊控制半主动座椅悬架能够在一定程度上降低座椅加速度值,从而有利于改善乘坐舒适性。
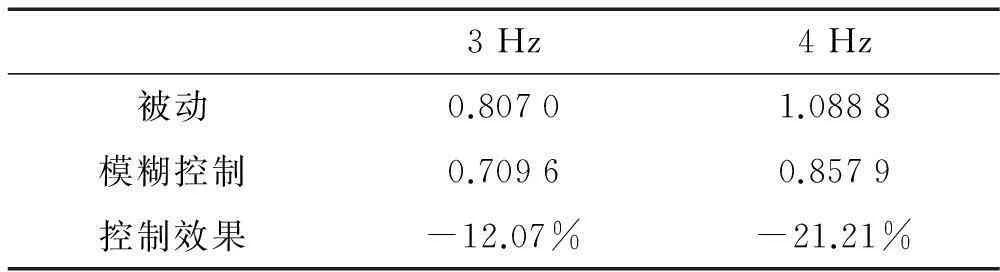
表3 正弦激励下座椅性能的均方根值
6结论
磁流液减振技术是当前振动控制领域最具开发应用前景的技术之一。本文将磁流变阻尼器应用于车辆座椅振动控制中,在汽车座椅悬架组成和磁流变减振器结构分析的基础上,应用理论建模、数值仿真、台架试验的方法,深入开展了基于磁流变减振器的车辆半主动座椅悬架理论建模及台架试验研究。
(1)所建立的半主动座椅悬架的动力学模型和磁流变减振器力学模型正确;
(2)在结构选型和设计的基础上,研制开发了汽车磁流变半主动座椅悬架物理样机及试验台架系统;
(3)从所开发的磁流变减振器的速度特性和示功特性曲线看出,该磁流变减振器性能可控性好,灵敏度高,能够最大限度地发挥振动衰减功能。
(4)针对汽车座椅系统的加速度、动挠度指标,经过仿真得出模糊控制方法对座椅悬架系统的振动控制具有较好的效果。
(5)以单频正弦信号作为振源,进行了半主动座椅悬架样机的试验验证,试验结果与仿真结果基本吻合,进一步证明该算法和所建样机的有效性。
参 考 文 献
[ 1 ] 朱思洪,朱星星,马然,等. 驾驶员座椅半主动空气悬架系统振动特性实验研究[J].振动与冲击,2013,32(15):168-172.
ZHU Si-hong, ZHU Xing-xing, MA Ran,et al.Vibration characteristics of the semi-active suspension system of driver seat [J].Journal of Vibration and Shock, 2013, 32(15):168-172.
[ 2 ] 张志勇,刘鑫,黄彩霞,等. 具有参数不确定性的车辆座椅悬架H∞输出反馈半主动控制[J].振动与冲击,2013,32(14):93-97.
ZHANG Zhi-yong, LIU Xin, HUANG Cai-xia, et al.H∞output feedback semi-active control for a vehicle seat suspension with parametric uncertainty [J].Journal of Vibration and Shock, 2013, 32(14):93-97.
[ 3 ] Maciejewski I, Glowinski S, Krzyzynski T. Active control of a seat suspension with the system adaptation to varying load mass [J].Mechatronics, 2014, 24(8): 1242-1253.
[ 4 ] Maciejewski I.Control system design of active seat suspensions [J]. Journal of Sound and Vibration,2012,331(6):1291-1309.
[ 5 ] Sun Wei-chao, Li Jin-fu, Zhao Ye, et al.Vibration control for active seat suspension systems via dynamic output feedback with limited frequency characteristic [J].Mechatronics, 2011, 21(1): 250-260.
[ 6 ] Dutta S, Chakraborty G. Performance analysis of nonlinear vibration isolator with magneto-rheological damper [J].Journal of Sound and Vibration, 2014, 333(20):5097-5114.
[ 7 ] Uz M E, Hadi M N S.Optimal design of semi active control for adjacent buildings connected by MR damper based on integrated fuzzy logic and multi-objective genetic algorithm [J].Engineering Structures,2014,69(15):135-148.
[ 8 ] Di Monaco F, Ghandchi Tehrani M, Elliott S J, et al. Energy harvesting using semi-active control [J].Journal of Sound and Vibration,2013,332(23):6033-6043.
[ 9 ] 张自伟,郑玲,邓召学,等. 基于磁流变悬置的整车建模与振动控制的研究[J].汽车工程,2014,36(10):1267-1273.
ZHANG Zi-wei, ZHENG Ling, DENG Zhao-xue, et al. A study on the modeling and vibration control of vehicle with MR mount [J].Automotive Engineering, 2014, 36(10):1267-1273.
[10] 诸葛平,朱思洪.一种车辆座椅磁流变减振器设计与试验研究[J].机械设计,2013,30(10):92-96.
ZHU Ge-ping, ZHU Si-hong. Design and experimental study of magneto-rheological fluid damper for a driver seat on vehicle[J].Journal of Machine Design,2013,30(10):92-96.
[11] 马然,朱思洪,梁林,等.磁流变减振器建模与试验[J].机械工程学报,2014,50(4):135-140.
MA Ran, ZHU Si-hong, LIANG Lin, et al.Modeling and testing of magnetorheological damper [J].Journal of Mechanical Engineering, 2014, 50(4):135-140.
[12] 贾永枢,周孔亢,徐兴.基于流动模式的汽车双筒式磁流变
减振器设计与试验研究[J].机械工程学报,2012, 48(10):103-108.
JIA Yong-shu, ZHOU Kong-kang, XU Xing. Design and experimental research on the vehicle twin-tube magnetorheological fluids damper based on pressure driven flow mode[J].Journal of Mechanical Engineering,2012,48(10):103-108.
[13] 薛晓敏,孙 清,伍晓红,等.磁流变阻尼器滞回模型参数的敏感性分析及其简化模型[J].西安交通大学学报,2013,47(7):102-107.
XUE Xiao-min, SUN Qing,WU Xiao-hong, et al.Simplified hysteresis model for magneto-rheological damper with parameter sensitivity analysis[J].Xi’an Jiaotong University Xuebao,2013,47(7): 102-107.
[14] 张香成,徐赵东,王绍安,等. 磁流变阻尼器的米氏模型及试验验证[J].工程力学,2013,30(3):251-255.
ZHANG Xiang-cheng, XU Zhao-dong, WANG Shao-an, et al. Michaelis model and experimental verification of magneto-rheological damper[J]. Engineering Mechanics,2013,30(3):251-255.
[15] 黄晨,陈龙,袁朝春,等.半主动悬架系统的混合模糊控制[J].汽车工程,2014,36(8):999-1003.
HUANG Chen, CHEN Long, YUAN Zhao-chun,et al. Hybrid fuzzy control of semi-active suspension system[J].Automotive Engineering, 2014, 36(8):999-1003.
Development of vehicle semi-active seat suspension with magneto-rheological damper
KOUFa-rong(College of Mechanical Engineering, Xi’an University of Science and Technology, Xi’an 710054, China)
Abstract:In order to improve the riding comfortability of vehicle driver, a kind of semi-active seat suspension with magneto-rheological damper was developed. The working principle and mechanical model of magneto-rheological damper were analyzed. As a result,the dynamic model of the vehicle semi-active seat suspension was established. The fuzzy control strategies with semi-active seat suspension were designed and the simulation analysis of fuzzy control seat suspension were carried out under the sinusoidal inputs. In addition, the physical prototypes of magneto-rheological damper and test bench system were made. The damping performance tests of the magneto-rheological damper were done. Then, the bench tests of the semi-active seat suspension with magneto-rheological damper were completed. The results show that the test results are closely consistent with the simulation results and the magneto-rheological damper has good controllability. The developed semi-active seat suspension based on magneto-rheological damper obviously reduces the vehicle seat vibration.
Key words:magneto-rheological damper; semi-active control; seat suspension; fuzzy control; bench test
中图分类号:U463.33;TH135
文献标志码:A
DOI:10.13465/j.cnki.jvs.2016.08.038
收稿日期:2015-02-25修改稿收到日期:2015-08-20
基金项目:国家自然科学基金项目(51275403);中国博士后科学基金项目(2014M552553XB);陕西省自然科学基金项目(2014JM7271)
第一作者 寇发荣 男,博士,副教授,1973年6月生
E-mail:koufarong@xust.edu.cn
