基于无功功率的交流异步电机转速估算研究
2016-05-19吴志鸿薛重德尚广利南京航空航天大学机电学院江苏南京210016
吴志鸿,薛重德,尚广利(南京航空航天大学机电学院,江苏南京210016)
基于无功功率的交流异步电机转速估算研究
吴志鸿,薛重德,尚广利
(南京航空航天大学机电学院,江苏南京210016)
摘要:研究基于模型参考自适应的交流异步电机无速度传感器矢量控制系统的转速估计,提出以电机瞬时无功功率为模型的转速估计方法,消除定子电阻项和积分项,并根据Popov超稳定理论证明系统的稳定性。在以TMS320F2812DSP为控制核心的平台上进行实验。实验结果表明,所提模型的估计转速和实际转速在低速、中速、高速下都具有较好的动态性能和响应性能,模型具有较好的跟踪性能和稳定性。
关键词:交流异步电机;无功功率;Popov超稳定理论;模型参考自适应;无速度传感器
随着工业的发展,交流异步电机在工业的使用范围越来越广泛。为了实现良好的调速性能,转速闭环控制必不可少。传统的速度闭环通过使用速度传感器实现,但是速度传感器的使用存在以下问题[1]:1)降低电机传动系统的刚性和稳定性,增加系统复杂性;2)精度较高的传感器价格昂贵,增加系统成本;3)速度传感器通常对温度敏感,不适合高温、强磁场等恶劣条件;4)部分工业场合对于电机的安装空间有要求[2]。因此,无速度传感器控制成为了现代交流传动控制技术的一个重要研究方向,而其实现基础则是利用电机易测的电流、电压等物理量进行在线速度估计。
目前,无速度传感器转速估计方法主要有[3-4]:开环估计、模型参考自适应法、Luenberger状态观测器方法、扩展卡尔曼滤波器法、高频信号注入法、神经网络法等。由于MRAS具有良好的鲁棒性和抗干扰能力,具有较好的应用价值。当前,模型参考自适应方法存在多种计算模型,常见的有转子磁链模型、反电动势模型、稳态无功功率模型等[5]。
本文提出瞬态无功功率模型,消除了定子电阻和积分的影响,同时参考模型和可调模型均利用瞬时无功功率计算,提高了转速估算的精确性,加快系统的响应和收敛速度,增强了系统的动态性能和稳定性。
1 三相交流异步电动机数学模型
三相交流异步电机是一个非线性、多变量、强耦合的系统。依据矢量控制原理,可以将三相交流异步电机控制模型通过坐标转换成直流电机控制模型,从而对控制模型实现解耦,简化控制。经过坐标变换,将三相静止坐标系(A-B-C)下的数学模型转换成两相静止坐标系(α-β)的数学模型如下[6]。
1)α-β两相静止坐标系上的电压方程如下:

式中:Lsd为定子每相绕组的等效自感;Lrd为转子每相绕组的等效自感;Lmd为定转子每相绕组的等效互感;p为微分算子。
2)α-β两相静止坐标系上的磁链方程如下:

2 基于无功功率的模型参考自适应速度辨识方法
2.1模型参考自适应的基本原理
模型参考自适应控制系统(MRAS)是20世纪50年代后期发展起来的控制方法。该控制方法使用具有相同输出的两种模型进行计算,输出差值经过自适应机构计算后将控制参数返回给可调模型中参与控制,但是参考模型的输出独立于控制参数。图1为模型参考自适应控制系统原理图。
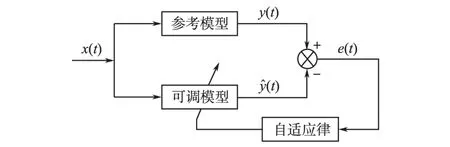
图1 模型参考自适应系统原理图Fig.1 Principle diagram of the model reference adaptive system
在MRAS设计中的关键问题是自适应律的选择,目前主要有以下两种方法[8]:
1)参数最优化法;
2)稳定性方法,如基于Lyapunov稳定性理论的方法和基于Popov超稳定理论的方法。
考虑到Lyapunov方法自适应律难以确定,文章采用基于Popov超稳定理论的方法对基于无功功率的模型参考自适应转速辨识方法进行稳定性分析,证明模型的渐进超稳定性。
2.2基于无功功率的转速估算原理
交流异步电机无速度传感器的实现是基于检测到的电机定子电压和电流,通过电机内部的电压、电流、磁链等数学模型控制理论实现电机的转速估算。由于经典的基于转子磁链的转子速度估算算法含有纯积分模块容易产生误差累积以及直流漂流问题,改进的反电动势模型消除了纯积分模块,但是定子电阻的存在以及转子角速度恒定的假设也会影响到系统精度[9-10]。考虑消除定子项,将电流和反电动势叉乘得到无功功率模型。
联列式(1)和式(2)的方程组,消去irα,irβ得到:
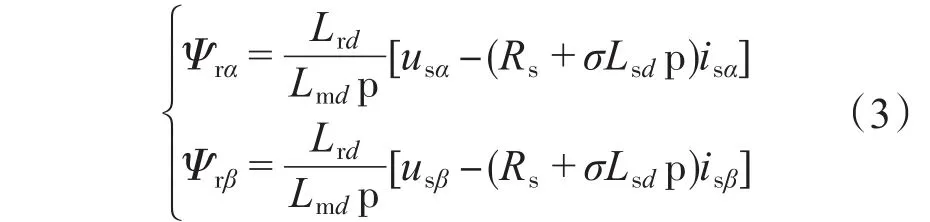
进一步整理得到转子磁链电压模型:

由于鼠笼型异步电机转子短路,urα=urβ=0,将转子电压关系代入式(1)并联列式(2)消去irα,irβ得到转子磁链电流模型:

式中:Tr为转子时间常数,Tr=Lrd/Rr。进一步整理得到:

由于电压模型不含转速ωr,故将电压模型作为参考模型,将电流模型作为可调模型。根据反电动势计算公式em=Lmd/LrdpΨr,对磁链电压模型和电流模型进行计算得到反电动势参考模型和可调模型:
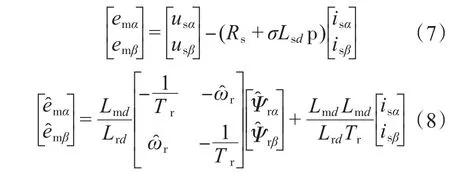
根据无功功率计算公式Qm=is×em可得到无功功率的参考模型和可调模型:
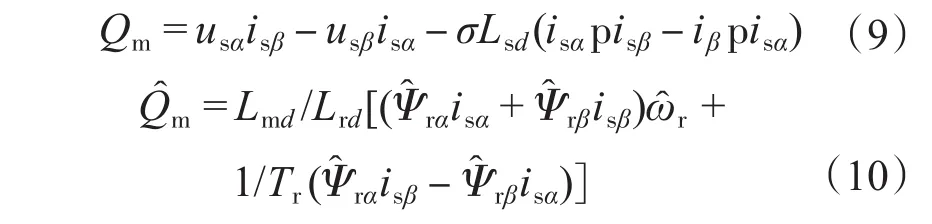
根据Popov超稳定性理论可以证明稳定性。取自适应律Kp+Ki/p计算得到基于无功功率的转速估算式:

根据式(9)和式(10)可以看出参考模型只是电流、电压信号的函数,不含定转子电阻、纯积分等环节,提高了转子速度辨识效果。
2.3稳定性证明
根据上述理论,将式(9)和式(10)求差,得:
定义:

根据图2可以得到:

根据通常的自适应律选择,ωr(ε,t)可以使用下面计算方法:

式中:v为模块D的输出,调节误差函数。

根据Popov超稳定性理论[11],需要满足下面积分不等式:

将式(13)和式(14)代入式(16),得到下式:

根据以下积分不等式可以证明式(17)的成立:

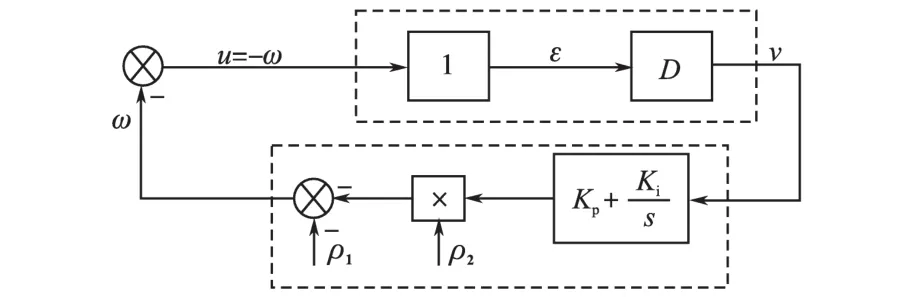
图2 等效非线性反馈系统Fig.2 Equivalent MRAS for the proposed scheme
3 实验结果分析
基于文章提出的无功功率转速估算策略,在以TMS320F2812型DSP为控制核心的平台上,分别进行异步电机的低速、中速、高速空载启动实验。实验对象为JW5624型鼠笼型三相交流异步电机,其额定数据如下:nN=1 450 r/min,UN=380 V,IN=0.3 A,PN=120 W,fN=50 Hz,np=2,实验采用的载波频率为5 kHz,采样、速度估算及速度控制时间间隔为0.4 ms。选取自适应律:KP=100,Ki=1.1。
下面给出3种转速下估算及实测转速图,其中实测转速通过旋转编码器得到。
图3是给定转速为n=250 r/min时电机空载启动转速曲线。图3中,实际转速上升时间为80 ms,超调量为0,稳态误差为2%。估计转速的上升时间为80 ms,超调量为40%,超调量较大,稳态误差为3%,稳态波动小。低速转速估算满足启动要求,上升时间小,反应快,但超调量略大。

图3 n=250 r/min时电机空载启动转速曲线Fig.3 The speed curves with no-load start when n=250 r/min
图4是给定转速为n=550 r/min时电机空载启动转速曲线。图4中,实际转速上升时间为72 ms,超调量为0,稳态误差为0.4%。估计转速的上升时间为96 ms,超调量为25%,超调量较低速时明显减小,稳态误差为1%。中速转速估算性能优于低速估算,超调量减小,上升时间小,反应迅速,上升时间略慢于实际转速。

图4 n=550 r/min时电机空载启动转速曲线Fig.4 The speed curves with no-load start when n=550 r/min
图5是给定转速为n=1 000 r/min时电机空载启动转速曲线。图5中,实际转速上升时间为168 ms,超调量为0,稳态误差为0.2%。估计转速的上升时间为168 ms,超调量为21.7%,较中速略微减小,稳态误差为5%。高速转速估算性能满足启动要求。
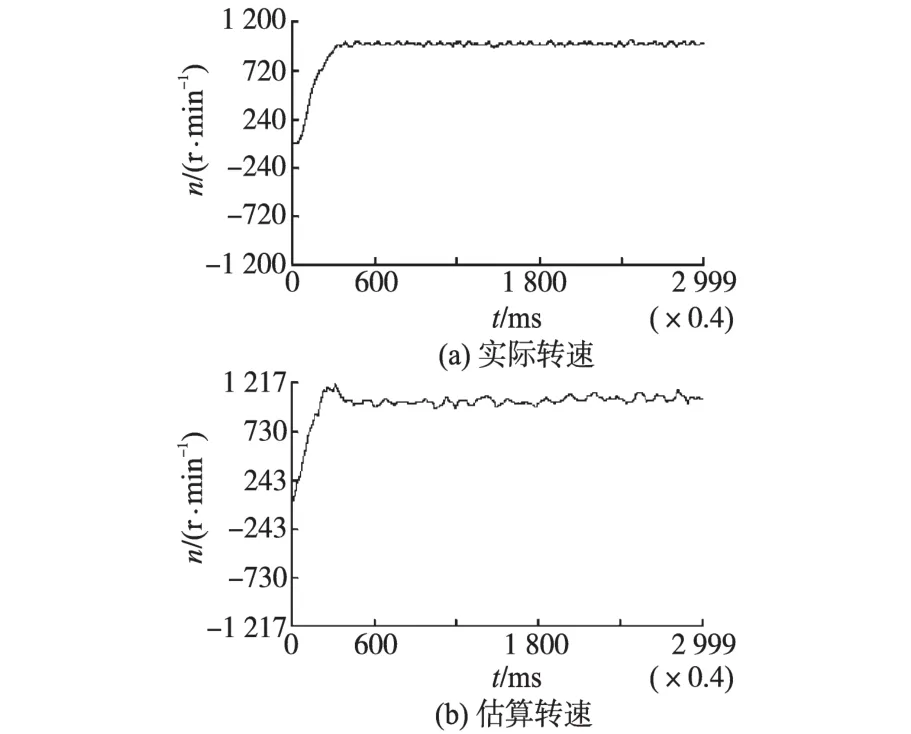
图5 n=1 000 r/min时电机空载启动转速曲线Fig.5 The speed curves with no-load start when n=1 000 r/min
4 结论
本文为消除传统的MRAS转速辨识方法存在的积分漂移和定子电阻影响,提出新型无功功率的转速辨识方法。实验结果表明,该方法在低速、中速、高速的估算结果都比较合适,响应速度快,超调量合适,稳态误差小。由于实验电机功率小,定子电压、电流值比较小,因此信号噪声影响较工业电机大。为此,采用有限冲击响应数字滤波器对于采样信号滤波。实验结果表明新型瞬时无功功率转速估算方法可用于异步电机的无速度传感器矢量控制系统中。
参考文献
[1]杨宁,缪仲翠.基于无功功率模型参考自适应的速度估算研究[J].郑州大学学报(工学版),2014,35(2):70-74.
[2]朱鹏程,陈坚,康勇.利用电机磁化电流无功功率实现转速的在线辨识[J].电气传动,2003,33(5):12-14.
[3]王成元,夏加宽,杨俊友,等.电机现代控制技术[M].北京:机械工业出版社,2006.
[4]Hasan S M N,Husain I. A Luenberger-sliding Mode Observer for Online Parameter Estimationand Adaptationin High-perfor⁃mance Induction Motor Drives[J]. IEEE Appl,2009,45(2):772-781.
[5]Suman M,Chandan C,Yoichi H,et al. An Adaptive Speed Sensorless Induction Motor Drive with Artificial Neural Net⁃work for Stability Enhancement[J]. IEEE Trans. Ind,In⁃formatics,2012,8(4):757-766.
[6]李华德.交流调速控制系统[M].北京:电子工业出版社,2003.
[7]陈伯时,陈敏逊.交流调速系统[M].北京:机械工业出版社,2013.
[8]杨泽斌,汪明涛,孙晓东.基于转矩绕组无功功率MRAS的无轴承异步电机无速度传感器矢量控制系统[J].四川大学学报(工程科学版),2014,46(2):140-146.
[9]Dehbozorgi M R,Kojabadi H M,Vahedi H,et al. A Compara⁃tive Study of Various MRAS-based IM′s Rotor Resistance Ad⁃aptation Methods[J]. Conference of the IEEE Industrial Elec⁃tronics Society,2012,11(1):4070-4075.
[10]Gayathri M N,Himavathi S,Sankaran R. Comparison of Ro⁃tor Flux and Reactive Power Based MRAS Rotor Resistance Estimators for Vector Controlled Induction Motor Drive [C]// Advances in Engineering,Science and Management (ICAESM),2012 International Conference on. IEEE,2012:183-189.
[11]Maiti S,Chakraborty C,Sengupta S. Adaptive Estimation of Speed and Rotor Time Constant for the Vector Controlled In⁃duction Motor Drive Using Reactive Power[C]// Industrial Electronics Society,2007. IECON 2007. 33rd Annual Confer⁃ence of the IEEE. IEEE,2007:286-291.
修改稿日期:2015-10-10
Speed Estimation Research of Asynchronous Motor Based on Reactive Power
WU Zhihong,XUE Zhongde,SHANG Guangli
(College of Mechanical and Electrical Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,Jiangsu,China)
Abstract:Studied the speed estimation of speed sensor-less vector control system of AC asynchronous motor based on MRAS,and then put forward a kind of speed estimation model by using the reactive power of the motor,which eliminated the stator resistance and integral term,at the meantime,proved the stability of the system by Popov′s hyperstability theory. Experiments on the digital platform based on TMS320F2812 DSP were conducted. The simulation and experiment results all show that the estimate speed and actual speed possesses good dynamic performance and response performance under low speed,medium speed and high speed,and that the reactive power model has good tracking performance and stability.
Key words:AC asynchronous motor;reactive power;Popov′s hyperstability theory;model reference adaptive system(MRAS);speed sensor-less
收稿日期:2015-06-02
作者简介:吴志鸿(1991-),男,硕士研究生,Email:WuZhihong_Felix@163.com
中图分类号:TM921
文献标识码:A
