超远程火箭弹道设计研究
2016-05-18张曙辉
徐 勤,刘 昆,宋 强,张曙辉
(1. 国防科学技术大学,长沙,410073;2. 北京宇航系统工程研究所,北京,100076)
超远程火箭弹道设计研究
徐 勤1,2,刘 昆1,宋 强2,张曙辉2
(1. 国防科学技术大学,长沙,410073;2. 北京宇航系统工程研究所,北京,100076)
根据射程,运载火箭一般可分为近程、中程、远程和洲际运载火箭,射程超过地球周长一半的火箭一般称为超远程火箭。当前,超远程火箭的弹道方案主要采取高弹道、部分轨道等技术,具体实现方案包括直接飞行、弹道主动段机动飞行、弹道被动段机动飞行、近地圆轨道机动飞行、近地椭圆轨道机动飞行等5种技术方案。对方案可行性及方案选择的判断依据进行研究,分析各技术方案的弹道特点,并与标准洲际射程参数进行对比,为超远程火箭的弹道技术方案的选择提供了借鉴。
超远程;火箭;弹道设计
0 引 言
运载火箭根据其射程一般可分为近程、中程、远程和洲际运载火箭。射程在3 000 km以上的火箭一般都称为远程火箭;射程在8 000 km以上的火箭又被称为洲际火箭;射程超过地球周长一半、射程超过20 000 km的则被称为超远程火箭。
根据文献报道,超远程火箭弹道方案一般采取高弹道、部分轨道等技术。俄罗斯自1992年曾对白杨洲际火箭进行过多次高弹道发射试验,弹道最高点达到常规洲际发射的5倍,再入角则达到常规洲际发射的3倍以上,从而减少了自身的雷达反射截面、增大了敌方防御系统的拦截难度,达到了突防目的[1]。苏联1959年即开始了部分轨道轰炸系统(Fractional Orbit Bombardment System,FOBS)的设计工作,研制飞行试验均采用椭圆或低地轨道的极轨飞行,发射飞行一圈后在本土完成再入[2]。本文主要讨论超远程火箭的弹道方案设计。
1 方案可行性分析
按照再入飞行器是否入轨,超远程飞行可以分为全程亚轨道飞行、轨道飞行后制动再入两类模式。
a)全程亚轨道飞行,即普通的弹道飞行,飞行过程包括:1)主动段,从火箭及再入飞行器组合体离开发射台到火箭发动机停止工作为止;2)自由段,此阶段火箭发动机停止工作,再入飞行器仅在地球重力的影响下飞行,此时由于飞行高度较高,空气稀薄,一般可以忽略空气动力的影响;3)再入段,此时火箭发动机需要再次启动并工作一段时间,再入飞行器与火箭实现分离并重新进入稠密的大气层。
b)轨道飞行后制动再入。该方案首先将再入飞行器与上面级的组合体由火箭基础级发射入轨,组合体进行轨道飞行,此后组合体进行调姿,并在适宜的姿态下完成制动离轨,在制动火箭发动机、重力的联合作用下离开轨道进入一条引向地面的轨道,最终再入飞行器与上面级分离进入再入段。制动离轨不可能瞬时完成,其制动离轨的轨道通常由上面级制动发动机推力的大小、推力方向和工作时间所决定[5],而这些均与上面级的设计参数直接相关。
2 方案判断依据
评价上述可能实现方案的主要技术参数一般可以分为两类:a)再入飞行器的再入参数;b)实现再入参数的火箭末级,即上面级的设计参数。
2.1 再入飞行器的再入参数
再入飞行器的再入参数主要为再入速度V和当地速度倾角Θ。Θ为再入速度V与当地水平线的倾角。而再入速度V和当地速度倾角Θ决定了再入飞行器的再入段最小负加速度、平均热流、驻点热流及总吸热量。具体计算公式如下[4]:
最小负加速度:
平均热流:

驻点热流:

总吸热量:

式中 Θe为再入飞行器的再入角;ve为再入飞行器的再入速度;vc为再入飞行器的落地速度;Cx为再入飞行器的阻力系数;c′f为再入飞行器与外形有关的常数;ks为再入飞行器取决于头部形状的系数;sT为再入飞行器的总表面积;SM为再入飞行器的最大横截面积;m为再入飞行器的质量;β为与大气密度相关的常数,
2.2 上面级的设计参数
实现再入参数的上面级设计参数主要为上面级的起飞质量、飞行时间、结构比和推重比。上面级起飞质量、飞行时间由火箭基础级决定。
结构比为上面级推进剂全部燃烧完后的纯结构质量与上面级起飞质量之比。在相同的起飞质量下,结构比小,即意味着上面级纯结构质量小,相应地可携带的推进剂质量多,上面级的结构优越。
推重比为上面级起飞推力与上面级起飞质量之比。推重比越大,表示上面级的加速性能越好,达到一定速度的飞行时间越短,从而使引力造成的速度损失越小。但推重比不宜太大,因为加速度太大,将会对上面级结构有较高要求,将使上面级结构质量增加。
3 具体实现方案比较
超远程火箭飞行的实现方案一般基于洲际火箭作为基础级得以实现,根据有无上面级、基础级与上面级的工作状态可以分为直接飞行、弹道主动段机动飞行、弹道被动段机动飞行、近地圆轨道机动飞行、地椭圆轨道机动飞行5种技术方案。
3.1 方案1:直接飞行
直接飞行方案为直接采用洲际火箭进行的超远程飞行,如图1所示。

图1 直接飞行方案
洲际火箭主动段关机时刻的俯仰程序角按超远程射程要求设计,此后再入飞行器经过自由飞行段后再入至目标落点,此时飞行器再入高度下的再入速度和再入当地弹道倾角均与洲际火箭8 000 km射程时的参数相差很大,其再入当地弹道倾角是洲际火箭标准射程下的33%,再入速度将是洲际火箭标准射程下的1.09倍。
3.2 方案2:弹道主动段机动飞行
此方案为基于洲际火箭、在其上增加一个上面级并在其弹道自由主动段工作进行的超远程飞行,如图2所示。
洲际火箭将上面级及再入飞行器按某一弹道送至弹道自由主动段的B点,上面级发动机工作,再入飞行器进入一个与原火箭弹道完全不同的大椭圆亚轨道,该方案可以设计成满足再入飞行器再入时的当地弹道倾角要求,但再入速度是洲际火箭的1.25倍。

图2 弹道主动段机动飞行方案
3.3 方案3:弹道被动段机动飞行
此方案为基于洲际火箭,在其上增加一个上面级并在其弹道被动段工作进行的超远程飞行,如图3所示。
洲际火箭将上面级及再入飞行器按某一弹道送至弹道自由被动段c点,上面级发动机工作,再入飞行器改变再入方向,并可以按再入时的再入速度、再入当地弹道倾角要求完成再入飞行。该方案可以设计成满足再入飞行器再入时的当地弹道倾角、再入速度要求。

图3 弹道被动段机动飞行方案
3.4 轨道机动飞行
此方案为基于洲际火箭,在其上增加一个上面级,洲际火箭将上面级及再入飞行器送入停泊轨道(方案4:近地圆轨道;方案5:近地椭圆轨道),上面级在停泊轨道制动使再入飞行器再入,如图4所示。
洲际运载火箭将上面级及再入飞行器送至停泊轨道,当轨道运行至d点,上面级发动机工作,再入飞行器制动离轨并再入。该方案可以设计成满足再入飞行器再入时的当地弹道倾角、再入速度要求。

图4 停泊轨道机动飞行方案
3.5 方案比较
不同的超远程飞行器飞行方案的弹道射程与高度曲线如图5、图6所示。方案1、2、3为采用高弹道技术,其弹道最高点高度均在1 000 km以上;方案4、5采用部分轨道技术,其弹道的一部分采用停泊轨道。

图5 不同方案弹道射程对比

图6 不同方案弹道射程对比局部放大
以一般洲际火箭飞行为基准,对5种不同的方案参数进行对比,对比关系如表1所示,计算相关公式参见文献[5]。方案2~5均需要在洲际火箭基础上设计上面级,并且各自上面级的技术要求不一样,针对不同的方案,在同样上面级发动机比冲前提下,上面级结构比、推重比两个重要设计指标均不一样,4种不同上面级的对比情况如表2所示。
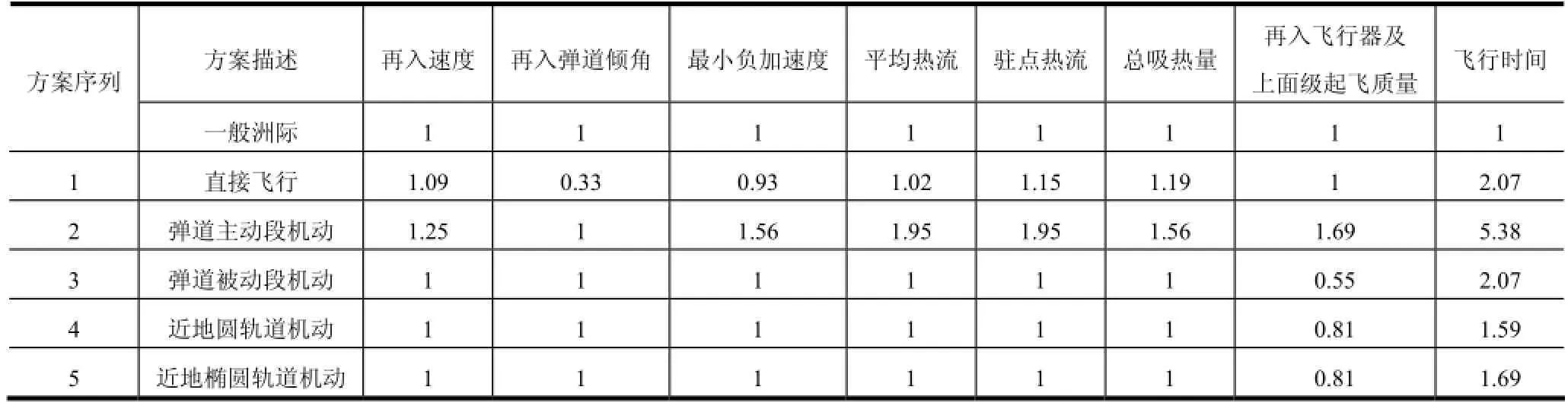
表1 弹道参数对比

表2 上面级参数对比
由表1、表2可知:
a)方案1的再入倾角最小,再入倾角减小,再入飞行器落点精度变差,较一般洲际火箭飞行虽然有较小的最小负加速度,但平均热流、驻点热流、总吸热量均有增大;
b)方案2的再入速度最大,由此带来的再入飞行器最小负加速度、平均热流、驻点热流、总吸热量以及火箭总飞行时间最大,所要求的上面级起飞质量最大,结构比最小、推重比最大;
c)方案3的再入速度、再入弹道倾角能够满足再入飞行器要求,所要求的上面级起飞质量最小、结构比最大;
d)方案4、方案5的再入速度、再入弹道倾角能够满足再入飞行器要求,方案5的上面级推重比最小;在同等起飞质量下,方案5较方案4有较长的飞行时间、较大的结构比和较小的推重比。
4 结 论
本文在分析实现方案的可行性,继而提出方案实现优劣的判断依据的基础上,对5种实现方案进行了论述,得出如下结论。
a)超远程火箭的弹道方案一般采取高弹道、部分轨道等技术,可以采用“直接飞行”、“弹道主动段机动飞行”、“弹道被动段机动飞行”、“近地圆轨道机动飞行”、“近地椭圆轨道机动飞行”5种技术方案,5种技术方案的主要弹道参数均各有特点;
b)上述5种技术方案,除“直接飞行”方案外,均需在洲际火箭的基础上设计新的上面级,4种方案的上面级的主要技术指标均不相同;
c)究竟采用何种技术方案进行超远程火箭飞行,需要结合弹道参数、上面级总体参数特点等因素综合考虑。
[1] United States air Force. a handbook of selected soviet weapon and space systems[M]. a History of Strategic arms competition 1945-1972(U), 1976, 3: 244-249.
[2] Mainyu e a. Fractional orbital bombardment system[M]. aud publishing, 1976.
[3] 贾沛然, 等. 远程火箭弹道学[M]. 长沙: 国防科技大学出版社, 1993.
[4] 赵汉元. 飞行器再入动力学与制导[M]. 长沙: 国防科技大学出版社, 1997.
Study on the Trajectory design of Ultra-long-range Rocket
Xu Qin1,2, Liu Kun1, Song Qiang2, Zhang Shu-hui2
(1. National University of defense Technology, changsha, 410073; 2. Beijing Institute of aerospace Systems engineering, Beijing, 100076)
Several techniques are applied by ultra-long-range rocket whose range exceeds half of the earth’s circumference, such as high trajectory, partial orbit and etc. Trajectory features of 5 mission schemes are analyzed in this paper, including direct flight, ascent maneuver flight, descent maneuver flight, LeO circular orbit maneuver flight, LeO elliptical orbit maneuver flight. principal trajectory parameters and key index of maneuver stages are compared.
Ultra-long-range; Rocket; Trajectory design
V412.4+1
a
1004-7182(2016)01-0005-04
10.7654/j.issn.1004-7182.20160102
2015-02-11;
2015-04-13
徐 勤(1972-),男,研究员,主要研究方向为飞行力学
编号:1004-7182(2016)01-0009-04 dOI:10.7654/j.issn.1004-7182.20160103
