Recent Progress in Hydrodynam ic M odel Test for Two Floating Bodies at Close Proxim ity in W aves
2016-05-15ZHOUGuangliXIAOWenbinOUYongpeng
ZHOU Guang-li,XIAO Wen-bin,OU Yong-peng
(1.Department of Naval Architecture,Naval University of Engineering,Wuhan 430033,China;2.Academy of Ocean Science and Technology,National University of Defense Technology,Changsha 410071,China)
Recent Progress in Hydrodynam ic M odel Test for Two Floating Bodies at Close Proxim ity in W aves
ZHOU Guang-li1,XIAO Wen-bin2,OU Yong-peng1
(1.Department of Naval Architecture,Naval University of Engineering,Wuhan 430033,China;2.Academy of Ocean Science and Technology,National University of Defense Technology,Changsha 410071,China)
The hydrodynamic interference problem for two floating bodies at close proximity in waves is mainly from the engineering practice of replenishment at sea.In the aspect of experiment,dozens of towing tanks are available to carry out the model tests at zero-speed condition for two floating bodies.However,the experimental data for ship-ship models with forward speed are relatively rare and rather valuable.This paper is focused on the recent progress of model tests for the fluid resonance at the sides between two floating bodies,the zero-speed and forward speed conditions of ship-ship models.In addition,the main technical difficulties are analyzed for the towing tank tests with twoship models advancing in waves.
two floating bodies;model test;zero-speed problem;forward speed problem
0 Introduction
Recently,much attention has been paid to the replenishment operations for naval and civil ships with a recent increase in the number of replenishment ships world widely[1-2].From a viewpoint of hydrodynamics,the engineering problems for the ships during alongside replenishment can be simplified to the hydrodynamic interactions between two floating bodies[3].
The hydrodynamic interference for two floating bodies is one of the classical problems in the field of ship mechanics and relevant theoretical studies have developed recently from 2-D approximate approaches to 3-D boundary element methods[4-6].However,some thorny problems,including resonance of the fluid between two floating bodies,numerical solution’s convergence for ships with bow flare,non-linear effects caused by free surface and efficiency of the calculation,need further investigations.In the aspect of experiment,numerous towing tank and lake tests have been carried out with two floating bodies in wave conditions to explore thecharacteristics of the hydrodynamic interactions for multi-body floating system.The motion responses accompanied by wave exciting forces were measured and the experiments results have also been applied to check and optimize numerical models’accuracy and feasibility.
In this paper,recent progress in the fluid resonance at the sides between two floating bodies and model experiments with zero and forward speed for multi-body floating systems are reviewed and analyzed.Typical difficulties for ship-ship tank experiments advancing in waves are also introduced for further study.
1 Experimental studies on fluid resonance of two floating bodies
With the purpose to explore the characteristics of the fluid response between two floating bodies,several experiments have been performed based on regular geometries.
Wen(2012)[7]carried out model tests in regular waves with single-box and box-box models and the experiments were performed in a nonlinear wave tank whose principal size is 60 m× 4 m×2.5m and the two boxes’principal size are 0.8 m×0.5 m×0.4m and 0.5 m×0.4 m×0.25m, respectively.In this experiment,contactless motion-measuring product was adopted to obtain boxes’motion responses with relative measurement error less than 5%.The strategies for his tests can be divided into two stages.In the first stage,free damping experiments were performed in calm water to get boxes’damping parameters,which can be used to revise current numerical models.In the following stage,the interaction experiments were implemented with various wave lengths and wave propagation directions.The results indicate that the amplitudes of models’roll and pitch are quite strong,which may be due to the side wall effects of the tank.
The fluid resonance,which takes place in the narrow gap between a box and vertical wall, was investigated by Tan et al(2014)[8].Flume tank experiments were conducted to obtain characteristics of the fluid motion responses in different cases of various gap width,draft,frequency of incident wave and wave height.The mechanism for mechanical energy dissipation was also discussed in this paper.The lengths of vertical wall and box are both 0.69 m.The main parameters for flume tank is 56 m×0.7 m×1.0 m and the width of box is 0.5m.The narrow gap varies from 0.05 m to 0.09 m with a range of the incident wave height,which is from 0.01 m to 0.045 m.The results show that the wave height for resonance waves increases with incident waves’height in a power function law and the wave height for the flow in narrow gap can reach seven times higher than the incident wave,while this parameter measured by Saitoh et al(2006)[9]can reach about five times maximally based on two parallel boxes experiments.
Typical works including measurements for the flow motion between two boxes were considered in Faltinsen’s experiments(2014)[10]in a wave flume.The size of water tank adopted in the experiments is 12 m×0.6 m×1 m.These two boxes have the same particulars with the length and width to be 0.585 m and 0.36 m,respectively.The depth of the moon pool was set as 0.18 m,as shown in Fig.1.The intelligent system was developed to control box’s heave amplitude and frequency.Several notable phenomena can be found in this experiment:(1)The mooneffects caused by the depth of box are extremely weak,which can be neglected;(2)The damping coefficients is much higher for a box with appendages underwater compared with bare model;(3)The moon effects for the fluid between two boxes are much inferior in a low-speed inflow and the decreased value has positive correlation with the amplitude of forced heaving. In the end,the author claimed that further studies should be conducted to explore the quantitative relationship between moon effect and moon pool’s width.
Model tests with two side-by-side barges were also carried out in the State Key Laboratory of Ocean Engineering(SKLOE)basin at Shanghai Jiao Tong University in China[11].The model scale was 1:60 and the dimensions of the basin are 50 m×30 m×6 m with the water depth set as 0.7 m.The motion responses of the two barges in 6 degrees of freedom were measured during the tests,see Fig.2.The wave elevation in the gap and drift forces of the two barges were also discussed.
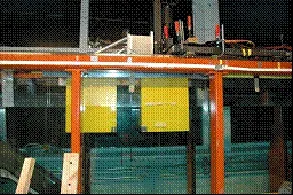
Fig.1 Experiment of the moon pool resonance between two boxes at the wave flume[10]

Fig.2 Experiment of the fluid resonance between two side-by-side barges in the SKLOE basin[11]
From the above analysis,it shows that:
(1)The model experiments are mainly carried out in large-scale flume or small-sized towing tanks.The damping characteristics,frequency for the fluid resonance and elevations of the free surface were measured to explore fluid resonance between two floating bodies.
(2)Motion mechanisms of the fluid vary with the incident wave,spacing between two floating bodies and model’s depth is expected to be discovered clearly.Hence the research objects are generally regular bodies,such as boxes.
(3)In addition,to decrease the interference effects caused by side wall,these models are relatively small compared with tank’s width.
2 Two-floating-model experiments at zero-speed condition
In the early 1980s,two-floating-model experiments were firstly carried out under incident waves at zero-speed condition in a long-strip towing tank by Kodan(1984)[12]and numerous tests with ship-ship models have been performed by domestic and abroad research institutions over the past 10 years.Detailed information for the test models and main particulars of thetanks are shown in Tab.1.
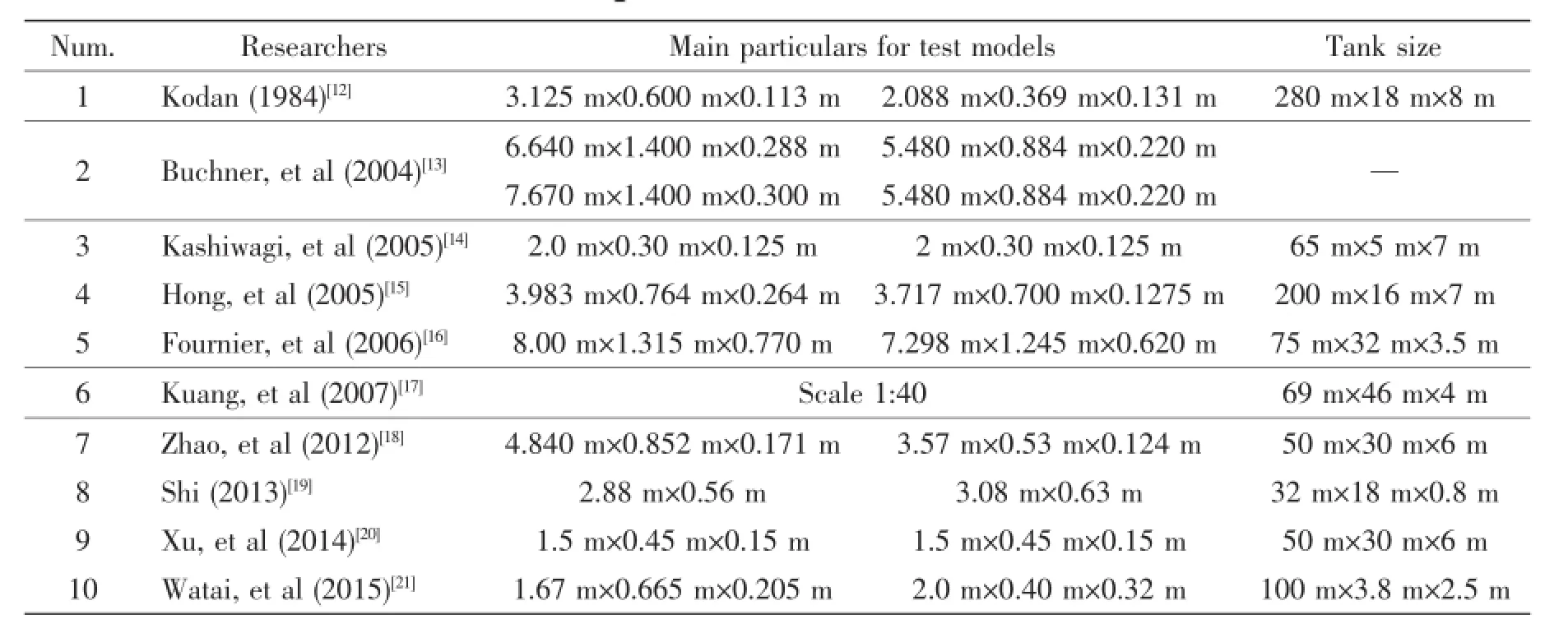
Tab.1 Introduction of the detailed parameters for the two-model tests w ith zero speed
Representative views of the test cases mentioned above are chosen to be shown in Figs. 3-6,which were conducted by OCEANIC of Canada[16],Shanghai Jiao Tong University[18],South China University of Technology[19],Technical University of Madrid of Spain[21],respectively.

Fig.3 Two-model tank test in OCEANIC of Canada[16]

Fig.4 Two-model tank test in SHJT University[18]

Fig.5 Two-model tank test in South China Universit of Technology[19]
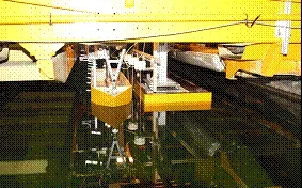
Fig.6 Two-model tank test in Technical University of Madrid of Spain[21]
Based on analysis of the above mentioned tests,several common characteristics for twofloating-model test at zero speed can be concluded as follows:
(1)High engineering background
The two-floating-model tests carried out in zero-speed and wave conditions are mainlyfocused on the problems that encountered in deep-water offshore engineering.Wave-induced force and motion responses were evaluated both in regular and irregular waves with large superstructures:representative objects are FPSO(Floating Production Storage and Offloading),FLNG (Floating Liquefied Natural Gas System),LNG(Liquefied Natural Gas),LNGC(Liquefied Natural Gas),FSRU(Floating Storage and Regasification Unit)and Shuttle Tanker.For the alongside unloading process with a 100 000 ton FLNG and LNG side by side as an example, the safe wave height required for operation is lower than 3 m with the transversal separation ranging from 2 m to 10 m and the complex interference effect caused by intermediate waves may result in unfavorable responses or risk of collision.Hence,to insure security,accurate prediction of hydrodynamic performance of the two-floating-model in waves based on experiments has significant engineering value.In addition,the replenishment between surface ship and submarine was also studied by Feng(2009)[22].Basic equipment and test parameters for model tests were introduced,but details about the experiments were disclosed.
(2)Two-floating-body connected by physical medium generally
During these experiments,test models are generally connected by physical medium,including mechanical spring,connection line,fender,magneto-rheological damp swell compensator,and so on,to keep models maintain side by side or one after the other connection states. Therefore,the dynamic force should be tested to analyze the difference of models’response motion with and without the connection medium in future study.Moreover,collision probability can also be introduced to evaluate operation’s security.
(3)Fluid resonance between two floating bodies remains a hot research topic
Differing from boxes or pontoons,the slit region between ship-ship models is quite long and narrow.For ship-ship model with zero-speed,wave probe system can be distributed uniformly in this region along the ship to quantize surface elevation under wave incident.The experiments,conducted by Xu et al(2014)[20],indicated that the maximum elevation for the fluid between ships,which located at the mid-ship,can be 3 times higher than the incident regular wave height.
(4)Incident flow should include head,oblique and beam waves
Two-floating-body experiments with zero-speed are mainly conducted in long-strip tank, which can provide head and beam waves and if the tank has enough width or possesses approximate square shape(such as offshore engineering basin),experiments under oblique waves can be developed for floating models.
3 Two-floating-model experiments with forward speed
Generally,ship-ship model experiments with forward speed can be broadly classified into two categories:namely captive or semi-captive tests and free-running experiments.For the former,all or several freedoms are fixed to acquire wave exciting forces and motion responses,while in the free-running experiments,six DOF motions are all released for these twoship models.
Tab.2 lists representative captive and semi-captive ship-ship model experiments which were carried out by MARINTEK(Norwegian Marine Technology Research Institute)cooperating with Ghent University[23],National Cheng Kung University[24],Institute for Marine Dynamics of Canada[25]and Australian Maritime Hydrodynamics Research Centre[26].Corresponding views for these tests are shown in Fig.7 to Fig.10.

Tab.2 Introduction of the captive or sem i-captive tests for two ship model w ith forward speed
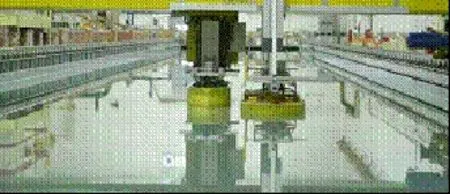
Fig.7 Two-model tank test in Ghent University of Belgium[23]

Fig.8 Two-model tank test in National Cheng Kung University of Taiwan[24]

Fig.9 Two-model tank test in Institute for Marine Dynamics of Canada[25]

Fig.10 Two-model tank test in Australian Maritime Hydrodynamics Research Centre[26]
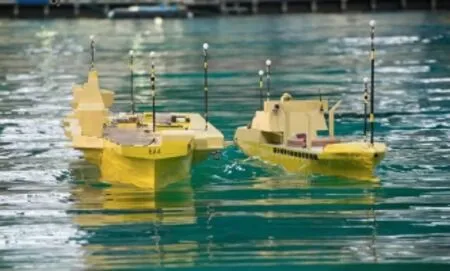
Fig.11 Free-running model tests for two warships advancing parallel in FNLP(122 m×61 m×5.5 m)[28]
However,rare information about shipship free-running experiments can be obtained.In domestic,maneuvering experiments were carried out with large-scale ship-ship free-running models based on fully-digital intelligent control system by Naval University of Engineering(2012)[27].The lengths for these two models are 8.2 m and 6.8 m,respectively and steering law for advancing parallel operation was addressed.Relevant re-search announced aboard is the underway replenishment between Queen Elizabeth aircraft and Fort Victoria replenishment ship and free-running experiments were also conducted in France’s National Laboratory Pool with 6.45 m and 4.54 m models[28].As shown in Fig.11, six-degree motion responses of ship models are captured based on optical system of Qualisys Tracker Manager(QTM).During this test,the highest sea state can reach to 6.
4 Technical difficulties for towing tank tests w ith ship-ship models advancing in waves
4.1 Towing system for ship models need to be improved
To explore hydrodynamic interaction between two ships advancing in close proximity,the towing carriage for two-model test should be equipped with another auxiliary towing apparatus[29],which may add to the experimental cost greatly.The research institutes mentioned in Tab.2 all developed another auxiliary towing apparatus based on original equipment.
In addition,the transversal and longitudinal separations between two models should be adjustable according to requirements.The test conditions mentioned in Tab.2 were all carried out with one longitudinal separation limited by unremovable apparatus and width of the tank. So the second towing apparatus should be designed to be free in transversal direction.
4.2 Roll motion should be released
Much attention has been attracted to predict vertical and longitudinal motion response through seakeeping experiments,but when it comes to ship-ship model,the transversal interaction related to wave effects can not be neglected.For this reason,roll motion response for the semi-captive models should be released to analyze the interference.Note that ship-ship model experiments carried out by Yang(2002)[24]was limited with spring installed in models’fore and stern,while the tests developed by the other three institutions all possess roll,pitch and heave free motions.
4.3 Synchronous measurement and analysis technology
Various parameters are needed to measure during two-model tests,such as the multidegree motion response of each model and relative motion for two models.If the interface and protocol of all kinds of testing instruments are not unified,the real-time motion measurement is hard to realize for the multichannel data acquisition.Yang(2002)[24]utilized rotary potentiometer to measure ship models’pitch and roll motion and movable potentiometer to get vertical motion signals.The resistance values are changed through the cordages linking the potentiometers to ship model with oscillatory motion and through the resistance values,linear and angular displacements can be solved accordingly.Obviously,this traditional method can not realize synchronous measurements for ship-ship models.
In addition,the hydrodynamic performance can be analyzed based on the frequency characteristics of measured signals,which include amplitude frequency and phase frequency.During data analysis,much more attention has been paid to ship model’s response amplitude op-erator(RAO),with neglecting phase difference for measured physical values.However,the phase information can just reflect some meaningful hydrodynamic characteristics of ship models.For ship-ship model advancing parallel in waves,motion phases of ship models can be different under various encounter frequency,advancing velocity and spacing and the difference represent important character for ship models’relative motion.
4.4 Decoupling of six-axis force/torque
As the key equipment to measure wave forces acting on ship models,six-axis force/torque sensor should be designed to meet the accuracy requirement.However,couple effects between the output force signal and the voltage signal are inevitably influenced by the design principle,manufacture process and detection mode.These effects may decrease the accuracy and cause great difficulties in the developing and using period.Meanwhile,the dimensional coupling is so complex that it is difficult to describe quantitatively.So it is necessary to delve into the design principle and manufacture process to eliminate the root of the coupling on one hand,which is of great cost.On the other hand,appropriate arithmetic is needed to work out to get the accurate relationship between output force and voltage signal.
4.5 Side wall effects
In the towing tank with finite breadth,side wall effects may exert great influence on the ship-ship models advancing in waves,which are mainly due to the reflection waves acting on the model.Yang(2002)[24]announced that side walls effects can be elim inated with singlemodel’s water plane area less than 1%of the tank’s cross section.McTaggart(2003)[25]designed ship-ship model experiments based on the standard proposed for single-model seakeeping tests by ITTC.Obviously,the mutual interaction for ship-ship models advancing in close proximity is both neglected in these two cases.It must be recognized that the side wall effects are much complicated for two advancing models.Expect for the critical wavelength corresponding to each model,the radiation and diffraction waves generated by a model may act upon another one.Additionally,the relative position of two models in the towing tank should be taken into account whether the tank wall effects occur in waves.
5 Conclusions
Along with the development of shipping business,replenishment problems for two ships have aroused great concerns from researchers in both civil and military fields.Much research effort has been paid to hydrodynamic interactions for two ship models advancing parallel in complex marine conditions.Some conclusions can be drawn from existing experimental materials as follows:
(1)In the materials available currently,experimental researches on fluid resonance between two floating bodies are mainly emphasized on describing flow mechanism.
(2)Test technologies for two-floating-body models at zero-speed are relatively mature and several institutions have carried out such experiments with side by side and one after theother states.
(3)Influenced by auxiliary towing apparatus,test equipment and human resource,experiments focused on two floating bodies with forward speed are relatively rare and rather valuable.There are still many technical difficulties for ship-ship model tests with forward speed in waves to overcome and improve.
(4)Although gradual maturing of CFD technique has made it possible to numerically solve the viscous flows around two ships,model experiments are still playing an irreplaceable role in quantitative analysis of ship-ship interactions and understanding the physics of unsteady ship hydrodynamics.On the other hand,the test data can also be produced for validation of viscous flow codes.
[1]Naval ships’technical manual-Underway rep lenishment[R].Naval Sea Systems Command,S9086-TK-STM-010/CH-571R1,USA,1994.
[2]Skejic R,Kirimoto K,Berg T E.Towards the navigational safety standard in close proximity underway lightering maneuvers of two ships[C]//Proceedings of the 30th International Conference on Ocean,Offshore and Arctic Engineering.Netherlands,2011:1-11.
[3]Xiao Wenbin.Study on the numerical method by Bessho-type Green function and model test technique for the two-ship coupled hydrodynamics in waves[D].Wuhan:Naval University of Engineering,2015.(in Chinese)
[4]Xu Yong.Study on the mechanism of hydrodynam ic interaction between multiple ships advancing in waves at close proximity[D].Wuhan:Naval University of Engineering,2012.(in Chinese)
[5]Islam M R,Murai M.Dynamic interaction of parallel moving ships in close proximity[J].Journal of Marine Science and Application,2013,12:261-271.
[6]Zhou Guangli,Dong Wencai,Xiao Wenbin.Numerical study on the hydrodynamic interaction of ship-ship models in calm water[J].Journal of Ship Mechanics,2015,19(3):237-248.
[7]Wen Junfeng.Numerical and experimental study on the interaction between waves and two floating bodies[D].Dalian: Dalian University of Technology,2012.(in Chinese)
[8]Tan Lei.Experimental and numerical investigation of fluid resonance in narrow gap between multip le maritime structures [D].Dalian:Dalian University of Technology,2014.(in Chinese)
[9]Saitoh T,Miao G P,Ishida H.Theoretical analysis on appearance condition of fluid resonance in a narrow gap between two modules of very large floating structure[C]//Proceedings of the 3rd Asia-Pacific Workshop on Marine Hydrodynamics.China,2006:170-175.
[10]Fredriksen A G,Kristiansen T,Faltinsen O M.Experimental and numerical investigation of wave resonance in moonpools at low forward speed[J].Applied Ocean Research,2014,47:28-46.
[11]Xu Liangyu,Yang Jianmin,Li Xin,et al.Numerical and experimental study on hydrodynamic interactions between two side-by-side barges in close proximity[J].Journal of Ship Mechanics,2014,18(3):248-261.
[12]Kodan N.The motions of adjacent floating structures in oblique waves[J].Journal of Energy Resources Technology,1984, 106:199-205.
[13]Buchner B,Gerrit D B,Wilde J D.The interaction effects of mooring in close proximity of other structures[C]//Proceedings of the 14th International Offshore and Polar Engineering Conference.France,2004:297-306.
[14]Kashiwagi M,Endo K,Yamaguchi H.Wave drift forces and moments on two ship arranged side by side in waves[J].O-cean Engineering,2005,32:529-555.
[15]Hong S Y,Kim J H.Numerical and experimental study on hydrodynam ic interaction of side-by-side moored multiple vessels[J].Ocean Engineering,2005,32(7):783-801.
[16]Fournier J R,Naciri M,Chen X B.Hydrodynamics of two side-by-side vessels experiments and numerical simulations[C]// Proceedings of the 16th International offshore and Polar Engineering Conference.USA,2006:158-165.
[17]Kuang Xiaofeng,Miao Quanming,Zhou Deccai,et al.Motion prediction of a ship to ship operation system in waves by experimental method[J].Shipbuilding of China,2007,48(special):528-531.(in Chinese)
[18]Zhao Wenhua,Yang Jianmin,Hu Zhiqiang,et al.Research on hydrodynamics of an FLNG system in side-by-side operation[J].Journal of Ship Mechanics,2012,16(11):1248-1256.(in Chinese)
[19]Shi Pingan.Research on wave motion compensation of two side-by-side positioned ships[D].Guangzhou:South China U-niversity of Technology,2013.(in Chinese)
[20]Xu X,Yang J M,Li X,et al.Hydrodynamic performance study of two side-by-side barges[J].Ships and Offshore Structures,2014,9(5):475-488.
[21]Watai R A,Dinoi P,Ruggeri F.Rankine time-domain method with application to side-by-side gap flow modeling[J]. Applied Ocean Research,2015,50:69-90.
[22]Feng Q.Contact dynamics of two floating cable-connected bodies[J].Ocean Engineering,2009,36:681-690.
[23]Ronæss M.Wave induced motions of two ships advancing on parallel course[D].Trondheim:Norwegian University of Science and Technology,2002.
[24]Yang Wenhong.Experimental study on seakeeping performance of two ship models advancing on parallel course in waves [D].Taiwan:National Cheng Kung University,2002.(in Chinese)
[25]McTaggart K,Cumming D,Hsiung C C,et al.Seakeeping of two ships in close proximity[J].Ocean Engineering,2003,30 (8):1051-1063.
[26]Thomas G,Turner T,Andrewartha T,et al.Ship motions during replenishment at sea operations in head seas[J].Transactions of the Royal Institution of Naval Architects Part A:International Journal of Maritime Engineering,2010,152:181-196.
[27]Dong Wencai,Bi Yi,Xiao Wenbin,et al.Free-running model tests for ship-ship model in lake environment[R].Wuhan: Defence Scientific and Technical Reports of China,2012.(in Chinese)
[28]Editorial Department of Naval&Merchant Ships.‘Queen’come back-Comments on Queen Elizabeth-calss aircraft carrier[J].Naval&Merchant Ships,2014,419:46-63.
[29]Kerkhove G V,Vantorre M,Delefortrie G.Advances model testing techniques for ship behavior in shallow and confined water[C]//Proceedings of the 1st International Conference on Advanced Model Measurement Technology for the EU Maritime Industry.France,2009:158-172.
波浪中两浮体水动力干扰模型试验研究综述
周广礼1,肖汶斌2,欧勇鹏1
(1.海军工程大学舰船工程系,武汉430033;2.国防科学技术大学海洋科学与工程研究院,长沙410073)
波浪中两浮体的水动力干扰问题主要来自于海上补给作业实践。目前,国内外已有多家水池机构可开展两浮体的零航速模型试验,而有航速状态下两船模型试验的数据十分稀少且珍贵。为此,文章重点介绍了国内外相关机构开展的两浮体间流体共振模型试验、零航速和有航速下的两浮体模型试验概况,并分析了波浪中有航速两船水池模型试验的主要技术难点。
两浮体;模型试验;零航速;有航速
U661.73
A
广东省教育部产学研结合项目(2012B091000137);水动力重点基金资助项目(9140A14030712JB11044)
周广礼(1990-),男,海军工程大学舰船工程系博士研究生;肖汶斌(1988-),男,国防科技大学海洋科学与工程研究院助理研究员;欧勇鹏(1982-),男,海军工程大学舰船工程系讲师。
U661.73
A
10.3969/j.issn.1007-7294.2016.09.011
1007-7294(2016)09-1201-10
Received date:2016-06-06
Foundation item:Supported by the Project on the Integration of Industry,Education and Research of Guangdong Province (No.2012B091000137);the Key Program of Hydrodynamics of China(No.9140A14030712JB11044)
Biography:ZHOU Guang-li(1990-),male,Ph.D.candidate of Naval University of Engineering,E-mail: zhouguangli.1990@163.com; XIAO Wen-bin(1988-),male,Ph.D.,assistant researcher of National University of Defense Technology, E-mail:hgxiaowb727@126.com.
猜你喜欢
杂志排行

船舶力学的其它文章
- Research on Influence of Rudder-Bulb-Fin Parameters on Hydrodynam ic Performance of Tw isted Rudder
- Numerical Study on Hydrodynam ics of Ships in Oblique M otion with M ulti-Degree of Freedom
- Study on Vortex-induced M otion Characteristics of Variable Cross Section M ulti-column of a New Type of Deep Draft FDPSO
- Slamm ing Study of W edge and Bow-flared Sections
- Dynam ic Pre-ultim ate Strength Evaluation of Containership based on a 2D M odified Hydroelasticity M ethod in Extrem e W aves
- Application of Inertia Relief in the Prediction of W elding Deformation for Large Complex Structures