并联机构的发展及应用领域的概述
2016-05-14贾雨璇谢哲东
贾雨璇 谢哲东

摘 要:详细介绍并联机构的发展概况,介绍国内和国外不同时期并联机构的发展进程。并且分别介绍了从六自由度并联机器人及少自由度并联机器人的应用领域。介绍了不同并联机器人的性能
关键词:六自由度并联机构;少自由度并联机构;应用领域。
中图分类号:S22 文献标识码:A DOI:10.11974/nyyjs.20160431024
1 引言
并联机构不仅具有刚度大,并且并联机构还具有适应性强,精度高等优点,所以并联机构引起学者们的高度关注和深入研究。因此被应用于各个行业的不同领域,例如航空航天、船舶、汽车等领域,是当今极具有广阔应用前景的一类科研项目。
本文主要对国内外不同阶段不同类型并联机构的发展进程和应用领域以及其结构的优缺点进行了概述。并联机构有很多不同的分类方法,这里按自由度数目的不同,可将并联机构分为2类:六自由度的并联机构,少自由度的并联机构。自1965年著名的Stewart平台问世以来并联机构在各个行业的各个领域开始了迅猛的发展。
2 国内外并联机构的发展
并联机构与串联机构相比具有较高的刚度,承载能力,定位精度和良好的动态性能,并且结构相对紧凑。而串联机构相对于并联机构则具有各条支链独立调节,控制相对容易等优点。2类机构具有各自的优缺点,相辅相成,在工业、农业以及各个领域中都起着至关重要的作用。
并联机构演化发展进程是从一杆到多杆,从平面运动到空间运动,逐渐改变的过程。1947年,Gough发表文章提出了六自由度的并联机构,引起了国内外的工程领域的极大反响。著名的Stewart平台最初是模拟飞行器的模型,应用于航空航天领域,由于Stewart平台具有6个自由度,所以可以使动平台上模拟航天飞船的驾驶舱获得任意所需要的位置和姿态,如图1。
1978年,著名的澳大利亚机构学家Hunt教授用螺旋理论对其空间的自由度进行了分析,并对其结构特性,机构性能进行了总体的研究分析,提出了许多新的结构方案。此后,并联机构广泛的应用于机器人领域。但是在随后并联机器人发展进入了瓶颈期,直到20世纪90年代初期,并联机器人才再次进入人们的视野中,又一次获得了广泛的关注,成为了国内外研究的热门课题。尤其在美国,德国,日本,中国,法国等都自主研发了基于Stewart平台的并联机床,从而同时促使了各类基于Stewart类型机床的各种专用部件的迅猛发展。此后,挪威 Muticraft,英国 Geodetic Technology,德国 Mikromat,和日本三菱等公司和研究机构,都自主研发出了基于不同机构不同类型的数控加工中心,激光或水射流等并联制造设备。六自由度并联机构除了在工程中有较为典型的机床应用外,还包括坐标测量机和医疗设备等方面的创新应用。
国内,燕山大学的黄真教授是研究并联机构的开拓者之一,并于20世纪90年代设计制造出六自由度并联机构。例如南昌的江东机床厂联合清华大学研制了XNZ2010龙门式虚拟轴并联机床。以上提出的虚拟轴机床已经完全进入了实用化的阶段。如图2,并已经进入商业化生产应用阶段。东北大学研发了能实现五轴联动的并联机床DSX5-70。哈尔滨量具集团联合哈尔滨工业大学研发的国内首创并联数控机床6-SPS,能够加工进行复杂曲面的加工。天津大学与清华大学联合研发的大型并联机床样机VAMTIY如图3,是能够实现镗、洗加工的大型数控机床。
并联机构能够实现空间中的多种自由度的运动。不同自由度具有不同条数和不同类型的各个支链。六自由度并联机构的类型主要有:6R,3R3P,4RC,SPS,SRT,STR,SPC,PSS等等。其中,各参数的意义如下:
由于一些应用场合并不一定需要6个自由度,且六自由度并联机构存在作业空间相对较小,支链干涉大,运动耦合性大,控制相对复杂等缺点,所以近几年来的研究趋向于少自由度的并联机构。最具有代表性的少自由度并联机构是1985年,Clavel博士提出的,是以Delta机构为基础结构的机械手。动力源采用的是外转动副驱副驱动以及平行四边形的支链机构,实现了末端执行器的三维高速运动。混联机构设备也是最近几年来又一热点课题。其机构特性的优点在于不仅能弥补纯并联机构支链干涉,运动工作空间小等缺点,还提出了一种创新型的模块,即“即插即用”型模块。可以构建各种形式,不同用途的系统及制造设备。此类混联型机构代表性的的设备如Tricept机械手,是于1985年由Neumann博士提出的,并且在1987年获得了专利其总体性能良好,工作空间相对纯并联机构较大,动静态性能良好。并具有可重构的特点。
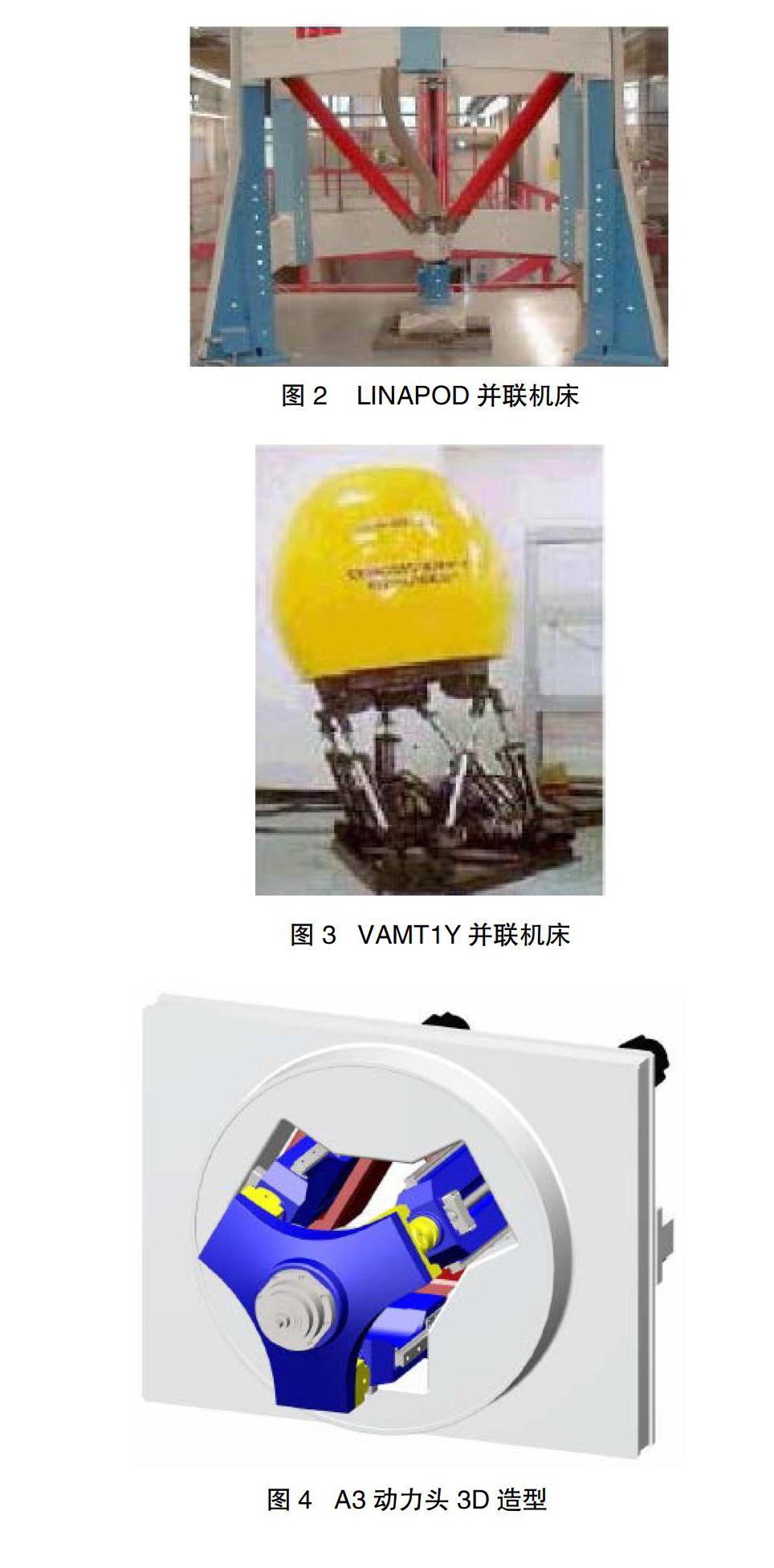
我国研制了并联三坐标动力头——A3动力头,而后提出的3-PRS并联机构为A3头的拓扑构型并联机构。主要研究方向有机构设计、运动学、动力学、精度分析、刚度分析、虚拟样机、性能评估等等,如图4。
3 并联机构的应用
并联机构的应用在不同的领域,如航空航天领域的飞行运动模拟器、并联机器人操作器、新型虚拟轴机床、体感模拟机、医疗设备、航天器交会对接等等方面都有广泛的应用。
3.1 运动模拟器
该类机构用于飞行模拟训练,既经济、节能、安全又不受客观条件限制。由于它的诸多安全经济等优点,现已发展成飞行员日常训练的必备设备。
3.2 航天飞行器对接器
3.5 其他应用
由于并联机构的诸多的高性能优点,还应用天文望远镜、加工装配、测量、焊接、挖掘、航海、娱乐设施等众多应用领域。并联机构还在大型天文望远镜的姿态调整中的应用。还出现了基于并联机构的灵巧手。
参考文献
[1]彭忠琦.并联机构的发展及应用[J].光机电信息,2011,28(12):45-50.
[2]徐亮. 3-PRS并联机构精度分析与综合[D].天津大学(硕士论文),2008(6).
[3]丁建.六自由度并联机构精度分析及其综合方法研究[D].哈尔冰工业大学(硕士论文),2015(6).
