基于WSN嵌入式智能视频小车的研究与设计
2016-05-06戴泽淼颜世波
戴泽淼,章 飞,颜世波
(安徽国防科技职业学院信息工程系,安徽 六安 237011)
基于WSN嵌入式智能视频小车的研究与设计
戴泽淼,章飞,颜世波
(安徽国防科技职业学院信息工程系,安徽 六安 237011)
摘要:以直流电机驱动的小车为载体设计了一种嵌入式车型机器人,使用STC15系列IAP15F2K61S2微控制器作为智能小车的控制核心,采用WiFi无线通信模块与上位机通信.通过红外光电传感器检测跑道轨迹,电机驱动芯片L298N结合PWM信号控制直流电机前进的速度和方向,超声波测距模块则可以检测障碍物的距离以准确避障.测试结果表明,小车具备了光电循线、超声波测距、视频监控及无线通信等功能.
关键词:STC15;智能视频小车;WiFi无线通信;视频监控系统
近年来,随着智能家居、智能交通和控制技术的发展,智能车辆的研究已成为一个热门话题.智能小车是机器人方向的一项重要内容,是一个集感知事件、实时规划、活动掌控等多种功用于一体的综合体系.
在本文中,使用宏水晶公司iap15f2k61s2 STC15系列单片机作为智能车的主控制模块,采用了增强8051 CPU iap15f2k61s2,内置高精度时钟、61K Flash、2048字节SRAM、3 路定时器、2 路 UART、3 路 PWM 等,性能稳定,用于接收并处理各传感器传回的信息,同时控制小车电机的转速来实现前行后退、转向等,利用WiFi无线通信模块,实现小车与终端移动平台之间的信息交互,达到控制智能小车前进、后退及状态信息采集等功能.
1系统总体设计
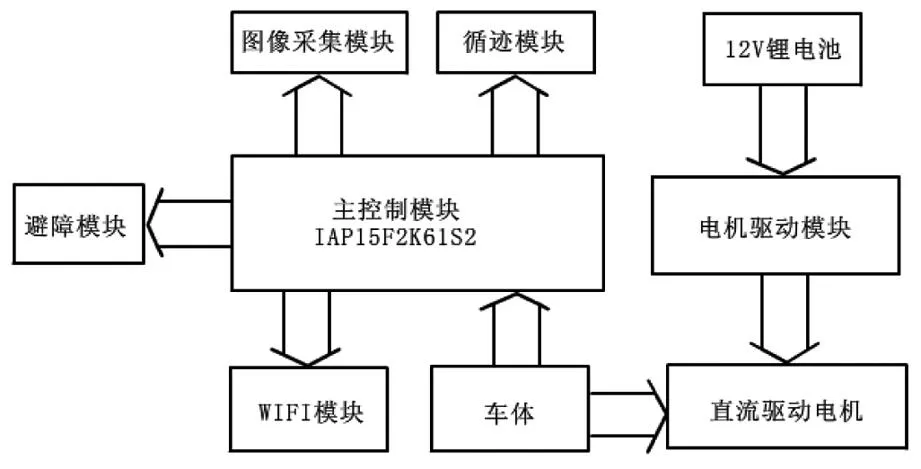
图1 系统总体设计框架图
本文所设计的嵌入式智能小车不仅可以作为移动实验室完成日常实训教学及学生创新设计,而且可用作嵌入式比赛设备,采用双12.6V直流电源供电,直流电机和其他模块的电源分为2个通道[1].视频小车包含的功能主要有:光电控制循迹、码盘测速、电机驱动、红外收发、超声波测距、无线WIFI通讯、视频监测、二维码扫描等.功能单元包括一个核心板、任务驱动板、光电编码器、循迹板和PTZ摄像机.系统设计方案如图1所示.
1.1微控制器模块设计
该系统采用iap15f2k61s2单片机作为系统的主控制器,主要完成传感器数据采集,电机控制,处理WiFi发送和接收数据.此外,小车和移动终端数据通信模块选用核心板上配置型号为ETW001的 WiFi通信模块,同时板载有 USB 转串口USB 下载和检测的输入输出按钮及LED指示灯[2].iap15f2k61s2单片机和WiFi通信模块电路的最小系统电路如图2、图3所示:
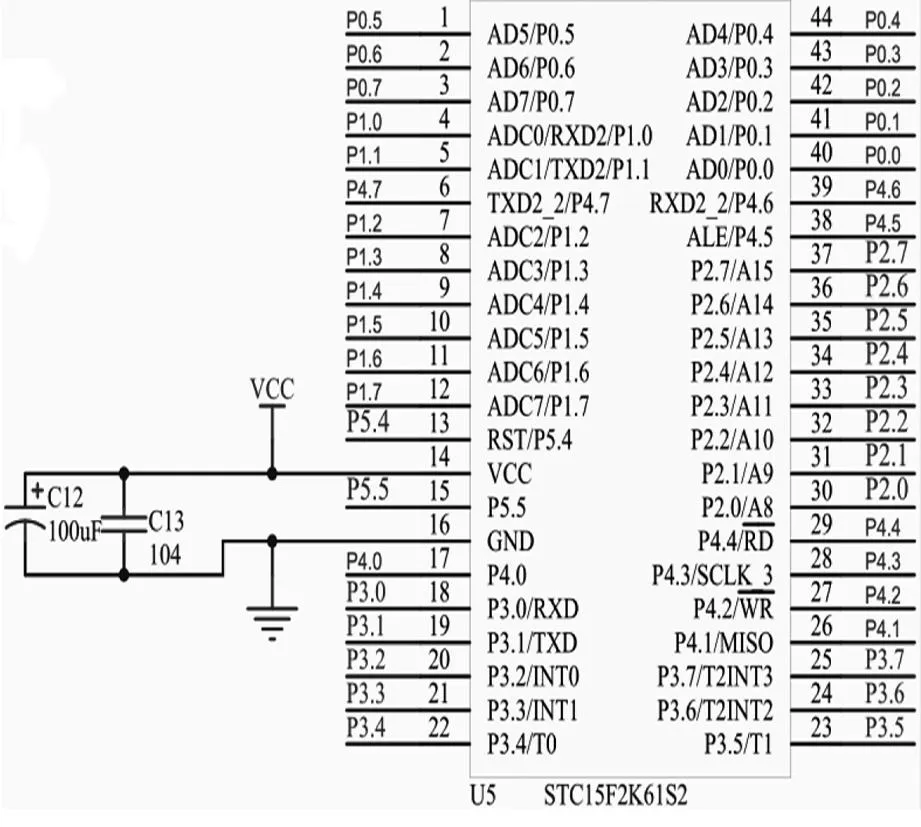
图2 51系列单片机最小系统电路图
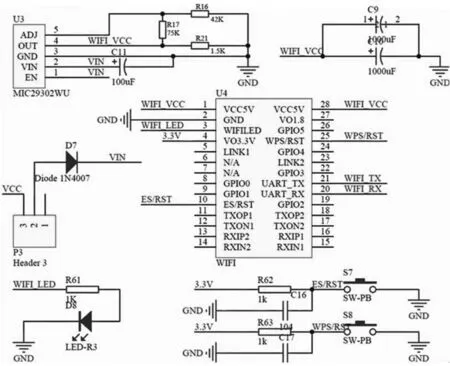
图3 WIFI通信模块电路
1.2任务板模块设计
任务板主要用于数据的采集和探测,集合多种传感器,可以实现超声波测距、光强度参数采集、红外发射信号、感光光敏电阻电路以及 LED指示灯和蜂鸣声光报警器,是整个小车设计的重点[3].
超声波测距的原理是利用发射装置产生超声波,即根据空气中超声波的传播速度,由定时器衡量发射声波后碰到障碍物反弹回来的总用时,利用发射和接收的时间差计算障碍物的实际距离.首先,通过控制信号脚监管信号的发射,经由555 定时器发出40kHz载波,并利用超声波探头将接收到的信号发送出去[4].当接收到超声波信号后,单片机会产生一个中断信号,单片机来计算测到的距离.
红外线发射是一种短距离无线通信,在一定范围内,它利用红外线发射管发射出光线,从而达到控制信号的功能,主要用于数据传输技术、远程控制等领域.本设计利用 555 定时器调节出38kHz 的红外载波,其频率调节可通过RW2实现[5].环境光照强度检测使用的是IIC总线的BH1750光照传感器.
1.3电机驱动模块设计
驱动板由2路电源输入到整个模型机器人平台供电.四个带测速码盘的直流电机(Namiki22CL-3501)主要驱动单元为两组 L298N.电机 L298信号隔离由三个光耦电路实现,防止电机转动所产生的回流对整个电路产生影响[6].12V 电采用三路芯片稳压成5V稳压模块,然后分别给核心板、驱动板及摄像机供电[7].由于本设计选用的核心 MCU 内含有 PWM 控制引脚,所以可以直接通过单路引脚来实现对电机速度的调节,很大程度上简化了整个程序的设计,使小车的行走更加方便.
1.4循迹模块设计
循迹板采用 8 路红外对管,8 个 LM358 电压比较器,配有 8 个 LED 指示灯.光电对管由光敏三极管和发光二极管组成,集聚光线可以导通或断开光敏三极管.其工作原理是振荡回路将生成的调制脉冲送入反射电路,最后经发光管衍射出光脉冲[8].在受光器作用范围内,被测物体所反射出来的光脉冲就被送入光敏三极管中.在接收电路的作用下,光脉冲信号将转换为电脉冲,然后经过放大器及同步选通放大、整形,采用RC 积分或数字积分光电开关方式来消除干扰信息,最后再由触发驱动器将光电开关控制信号发出去.
利用555 定时器产生 700Hz方波信号来驱动三极管,再由W1~W8 来调节发射管功率.当三极管导通时,红外发射管开始发射[9].红外接收头接收到信号后,先进行放大,通过控制三极管(增加驱动能力)同参考电压做比较后输出.注意,此处标准电压应根据周围实时环境光照强度调整为适量电压,才能正确实现小车智能循迹.
1.5云台摄像头图像采集模块
本设计所采用云台摄像头如图4所示,摄像头的像素300万,供电5V,水平旋转约360°,垂直旋转达180°.根据设计,开机一分钟内摄像头会有自检阶段,其他一切操作应在自检后进行.在自我检查过程中,摄像机可以水平和垂直旋转一周,垂直方向为180度[10].云台可实现图像抓拍,识别颜色和二维码,并将拍摄到的图像通过无线WiFi发送至上位机.摄像头的电源是从驱动底板的JP2输入,由开关S3控制电源的通断,摄像头WiFi与小车WiFi相对应,通电后自动连接.

图4 云台摄像头
2智能小车控制系统软件设计
对小车的智能控制可分为自动控制和自主遥控,即小车在行进过程中自动检测传感器信号获取路面实时状况,判断周围障碍物距离等进行自主定位,利用电机驱动模块输入信号的改变来调节电机的方向和转速,从而准确实现循线行驶和道路避障.另外,通过移动通信终端软件设计界面,点击界面控制按钮也可以人为地来控制小车的行进、转向.
2.1下位机驱动程序设计
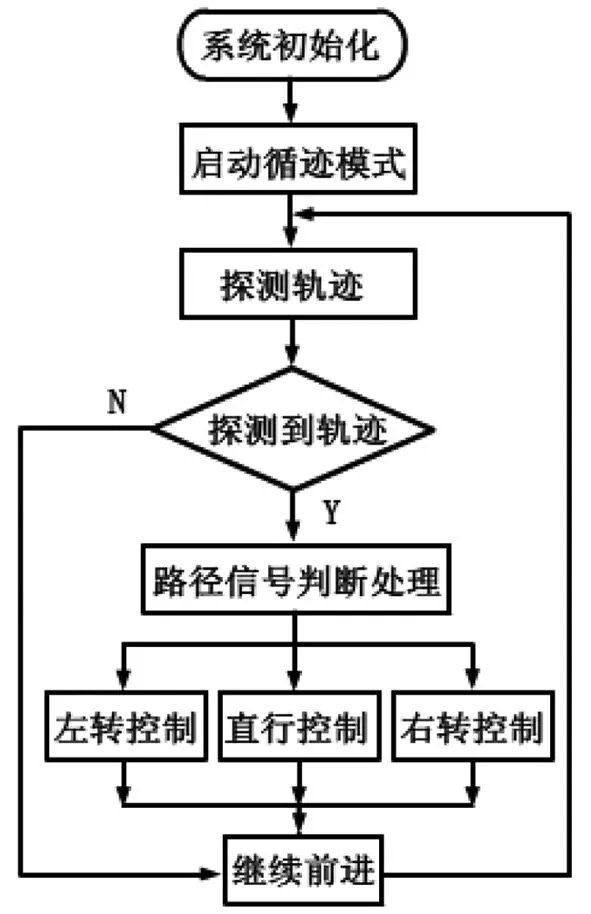
图5 下位机软件程序流程图
通过Keil C51进行单片机程序的编写.Keil集编辑、编译、仿真等于一体,易学易用,在调试程序、软件仿真方面也有很强大的功能.通过STC ISP烧录软件完成单片机程序的下载[11].下位机程序采用脉宽调制信号来控制直流电机的速度和换向,主程序对系统进行初始化,配置寄存器和跟踪模式,不断地扫描与红外探测器连接的单片机端口,将路径信息进行判断处理,单片机再将相应的信号发给电机驱动模块来纠正小车的运行状态,从而实现自动循迹的功能.
2.2上位机安卓程序设计
本系统采用Android软件作为移动终端开发平台.Android开发的三个工具分别是:开发工具包JDK、开发平台Eclipse和开发工具包Android SDK.安卓系统的体系结构是四层结构,自上而下分别是应用程序层、应用程序框架层、系统运行库层、Linux内核层.
上位机可通过WiFi无线通信模块与小车进行连接,利用在安卓平台开发的手机APK软件向小车发送控制指令,控制小车的循迹、拍照、扫描二维码、通信等行为,软件中的方向键分别表示小车的运动方向.此外,还加入了循迹控制指令,当小车进入循迹控制时,小车变为自动控制,当按下停止键时,小车则退出循迹控制.图6是小车通过无线网络与上位机连接成功后显示的初始化主界面,点击界面上的按键,小车即可做出相应动作.

图6 安卓界面初始化
3系统测试

表1 系统测试指标
小车采用模块化电路设计,系统性能稳定、响应快、设计简洁.最后,在白底宽度为30cm、循迹线宽度为30mm的标准赛道上对智能小车的性能指标做了测试,测量小车在各测试点响应时间和循迹准确度.结果表明,该系统所设计的智能小车能够实现自动循迹、光照强度检测、目标距离测量、 二维码扫描、图像拍摄、颜色识别等功能,成功地实现了各项预期效果.
4结语
本系统以iap15f2k61s2作为主控芯片,设计并研制了一种可遥控或自动循迹的视频小车.测试结果表明,用户通过手机APP连接WiFi网络人为控制小车各项行为动作,系统响应速度快,能准确实现循迹、测距和完成指定任务.另外,小车还能够由终端软件一键切换为自动模式,设计非常人性化.本系统所设计小车可应用于智能仿真实训、智能运输、超市或者家居环境等.
参考文献:
[1]赵印伟,谢胜利.基于AT91RM9200的嵌入式网络摄像机的设计与实现[J].微计算机信息,2006,(4):26-28.
[2]樊国栋,石红瑞,张健.嵌入式Linux下CMOS摄像头驱动的设计与实现[J].工业仪表与自动化装置,2010,(3):68-70.
[3]盛蕾.Win网络研究及基于Linux测试平台的实现[D].上海:同济大学硕士学位论文,2007.
[4]邱瑛,富大伟,王惠森,等.移动机器人模糊控制系统避障研究[J].河北工业大学学报,2007,(6):86-89.
[5]刘秀英,赵刚.基于ARM的视频图像采集及无线传输系统[J].计算机时代,2008,(11):20-21.
[6]温敏,艾丽蓉,王志国.Android智能手机系统中文件实时监控的研究与实现[J].科学技术与工程,2009,(7):1716-1719.
[7]Motton L, Cortes C. Comparison of classifier methods: A case study in handwritten digit recognition[A]. Proceedings of the 12th IAPR International[C]. 1994.
[8]Hsu C W, Lin C J. A comparison of methods for multi-class support vector machine[J]. IEEE Transactions on Neural Networks,2002,(2):415-425.
[9]Varaiya P. Smart cars on smart roads: Problems of control[J].IEEE Transactions on Automatic Control, 1993,(2): 195-207.
[10]欧海涛,张卫东,张文渊,等.基于多智能体技术的城市智能交通控制系统[J].电子学报,2000,(12): 52-55.
[11]王靖宇,秦刚,王粉娟.智能车电磁监测及控制算法的研究[J].电子设计工程,2011,(5): 11-12.
(责任编校:晴川)
Embedded Intelligent Video Car Based on WSN
DAI Zemiao, ZHANG Fei, YAN Shibo
(Department of Information Engineering, Anhui Vocational College of Defense Technology,Liu’an Anhui 237011, China)
Abstract:The study designed a robot with embedded modules, which used the DC motor-driven car as the carrier. It used STC15 series IAP15F2K61S2 micro-controller as the core control of the smart car, and WiFi wireless communication module to communicate with the host computer. It detected the trajectory of the track by infrared sensors, used motor-driven chip L298N combined with PWM signal to control the forward speed and direction of the DC motor. The ultrasonic ranging module could detect the exact distance in order to avoid the obstacle. The test results of the smart car prototype showed that the car had functions of following the track photoelectrically, ultrasonic ranging, video surveillance and wireless communications.
Key Words:STC15; intelligent video car; WiFi wireless communication; video surveillance system
中图分类号:TP368.1
文献标识码:A
文章编号:1008-4681(2016)02-0063-04
作者简介:戴泽淼(1982— ),女,安徽六安人,安徽国防科技职业学院信息工程系讲师,硕士.研究方向:移动互联技术应用.
基金项目:安徽省2016年高校优秀青年人才支持计划重点项目(批准号:gxyqZD2016459);安徽省2014年省级质量工程计算机应用技术(移动互联网方向)专业综合改革试点项目(批准号:2014zy121).
收稿日期:2016-01-07