基于sEMG的行走步态非均匀特性及其对识别的影响*
2016-05-03王佳佳高发荣罗志增杭州电子科技大学智能控制与机器人研究所杭州3008浙江大华技术股份有限公司杭州30053
王佳佳,高发荣,孙 曜,罗志增(.杭州电子科技大学智能控制与机器人研究所,杭州3008;2.浙江大华技术股份有限公司,杭州30053)
基于sEMG的行走步态非均匀特性及其对识别的影响*
王佳佳1,2,高发荣1*,孙曜1,罗志增1
(1.杭州电子科技大学智能控制与机器人研究所,杭州310018;2.浙江大华技术股份有限公司,杭州310053)
摘要:人体生理特性和运动特性是影响步态识别的重要因素。利用实验采集的下肢表面肌电信号,首先对肌电信号进行小波消噪及特征提取,然后构造支持向量机分类器进行分类与识别,并针对步态周期数据的非均匀性(非等时性)特性进行了详细讨论。结果表明,即使在匀速行走条件下,人体步态周期仍然存在一定的非均匀特性,且这一特点会影响步态识别的准确性。这对于进一步研究步态稳定性和步态识别率等具有一定的参考价值。
关键词:步态识别;肌电信号;支持向量机;非均匀特性
项目来源:国家自然科学基金项目(61372023,61172134);浙江省自然科学基金项目(LQ13F010014,Y1101230)
人体行走直观上表现为双腿交替的规律性移动,本质上是神经系统调整全身多部位相关肌群协调运动的结果[1]。人行走时下肢的位置和姿态用步态来表征,步态周期指一侧肢体完成从足跟着地到同侧足跟再次着地所需要的时间,根据足底的位置是否着地,一个步态周期可分为支撑相和摆动相,每个相位又可再分成几个阶段[2]。更为详尽的分析发现,步态可细分为24个不同的状态,如果把这些因素都考虑到,则步态具有明显的个体差异性[3]。
不仅不同个体间的步态有差异,而且同一个人在不同状态下,其步态也会出现差异。研究发现,步速是影响步幅、步长、关节角度等步态参数的重要因素[4]。持续的步态行走具有复杂的时空特征,涉及身体各段间的交互和多个关节的耦合,并由中枢神经系统进行协调[5]。在步态测量与控制中,需要实现对速度变化进行有效的跟踪与调整[6-7]。由于人体步态具有个体及时空等差异,因此有必要对步态特性进行深入分析。
步态识别是研究步行规律的有效方法,近年表面肌电信号sEMG(surface Electromyography)已广泛用于步态分析中[8],其识别结果可用于康复医疗、假肢控制、功能评价等领域。杨鹏等人对不同年龄、性别、体型的各类截肢患者的下肢运动步态和控制策略进行研究[9],还针对步态周期与速度的变化规律,对步速调整的控制方法进行了研究[10]。谭冠政等人设计了智能假肢步速测量数字电路实现实时测量[11]。此外,研究者还通过加速度测量系统进行步态分类[12],并利用角加速度数据检测轻偏瘫患者步态的不均匀性特征[13]。然而,对行走步态非均匀性的研究,尤其对步态识别结果影响的研究还较为少见。
本文以匀速步行状态获取的下肢表面肌电信号为研究对象,分析行走过程中出现的步态周期间存在的非等时(非均匀)特性,并利用特征提取和分类识别方法,详细讨论这一现象对步态识别率的影响。
1 肌电信号分析的原理和方法
1.1肌电信号预处理
考虑到肌电信号非常微弱,在采集过程中可能会引入一些干扰,使得真实信号淹没在干扰噪声中,从而降低信噪比,故正确区分有效信号并排除噪声干扰是肌电信号预处理时的重要环节[14]。本文采用小波模极大值去噪方法[15],具体如下:
首先对采集的原始肌电信号样本进行4层小波分解,基小波选用紧支集双正交小波sym8,得到尺度s上位置x处的含噪信号f的离散小波变换Wf(s,x)。
然后,利用信号中突变的极值点,通过Lip指数得到信号奇异点。这里Lip指数是局部奇异点特征的一种量度,其定义如下:
设正整数n,n≤α≤n+1,如果存在正整数A>0及n次多项式pn(x),使得

对于x∈(x0-δ,x0+δ)成立,则称f(x)在x0点是Lipα的。α越大,该点的平滑度越高;α越小,该点的奇异性越大。
接着,根据肌电信号和噪声信号的不同特性,实现消噪。信号f(x)的Lip指数与小波模极大值(小波模极大值需满足|Wf(s,x)|≤|Wf(s,x0),x0为小波变换在尺度s下的局部模极大值点)需满足

其中,t为时间,j为小波尺度,k∈Rn。
对于被测信号α≥0,小波变换的模极大值将随着尺度j的增加而增大;而对于白噪声α<0,其模极大值随着j的增加而减小。因此利用不同尺度间小波变换的这一规律,去除相应噪声极值点(其幅值随尺度增加而减小),而保留有用信号极值点(其幅值随尺度增加而增大)。
最后,通过小波重构,得到去除噪声后的肌电信号样本数据。
1.2肌电信号特征提取
为准确实现动作识别,特征提取非常重要。这里对消噪处理后的肌电信号提取相对简单、高效的积分肌电值和绝对值方差时域特征[16],作为后续分类器进行分类的输入特征[17]。积分肌电值I和绝对值方差V的计算如下:
其中,x(i),i=1,2,…,N为一长度为N的肌电信号时间样本序列,i为每组采样点数。
由此,构成一组特征向量Zi={Ii1,Vi1,Ii2, Vi2,…,Iij,Vij},其中,i=1,2,…,M,M为对应的总状态序列号;j=1,2,…,K,K为肌电信号的总测量路数。
1.3支持向量机特征分类
支持向量机SVM(Support Vector Machine)是基于统计学习理论的一种机器学习方法,其结构简单,推广能力高[18]。在处理“维数灾难”和“过学习”等传统困难方面具有优势。SVM体系结构如图1所示。
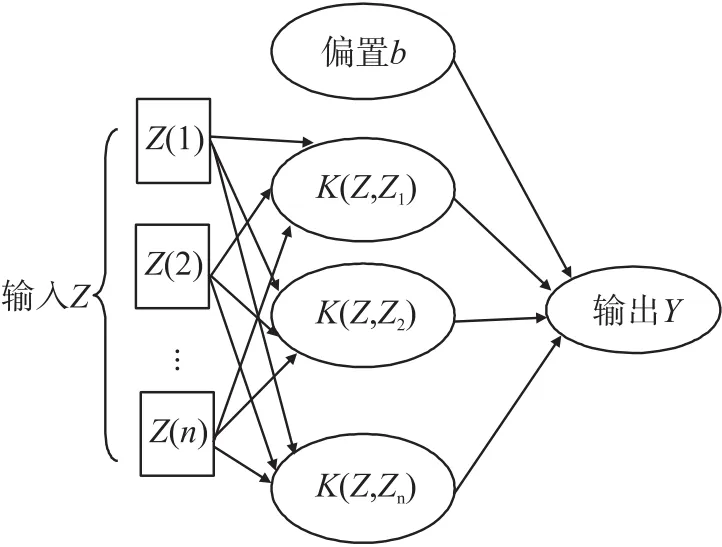
图1 支持向量机体系结构
图1中,SVM的输入向量Z,即Z(1),Z(2),…, Z(n),为上节肌电信号的特征向量Zi={Ii1,Vi1,Ii2, Vi2,…,Iij,Vij}。K为SVM的内积函数。其输出Y满足的分类决策函数为:
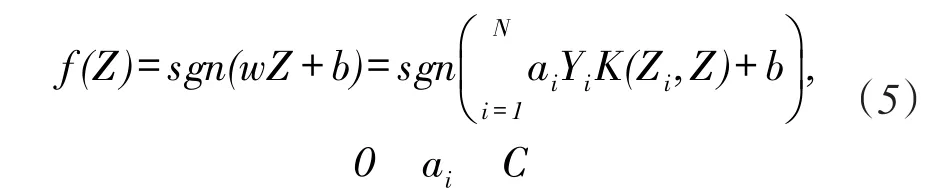
式中,w为权系数,b∈R为偏置;ai为拉格朗日系数,K(Zi,Z)为核函数;C为惩罚参数。
近年来,随着人体运动识别和假肢控制研究的深入,SVM方法在肌电信号的动作模式分类与识别中取得了较好效果[19-20]。因此本文对肌电信号进行步态识别时,亦采用SVM算法。
2 肌电信号实验数据采集
2.1肌电信号数据采集
在实验对象选取时,考虑不同个体行走时的身高和步频差异,选用了3位22岁~25岁的健康男性。步行中选择以正常人的行走速度(1.5 m/s)进行平地行走,同时为保证速度均匀,消除步速差异对步态周期的影响,行走安排在BROTHER WL-332跑步机上进行。实验中进行了同步摄像跟踪,用于步态的可视化识别对比验证。在测量位置选取时,综合考虑行走时的肌肉受力特点及位置和信号区分度等因素,选择大腿上不同区域并具代表性的四块肌肉:股内侧肌、半腱肌、长收肌、阔筋膜张肌,进行行走过程中的表面肌电信号采集。肌电采集仪选用Noraxon公司的MyoT⁃race 400设备,拾取电极记录的信号数据,通过蓝牙设备传送到装有肌电信号接收软件的电脑上。实验中4块肌肉通过4路信号同时采集,采集频率为1 000 Hz。
2.2肌电信号消噪处理
按照第1.1节的肌电信号分析方法,根据采集过程中肌电信号夹杂的噪声特点,首先对肌电信号进行小波分解,然后根据小波系数的奇异性,利用信号与噪声模极大值在小波尺度上的不同变化特性,分离出信号与噪声,最后重构消噪后的肌电信号样本数据。实现对含有噪声的肌电信号进行消噪处理,即去除白噪声并保留奇异点信息,图2为消噪前后的肌电信号对比图。
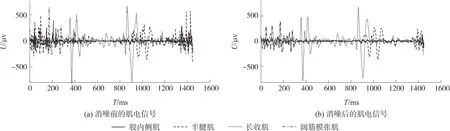
图2 肌电信号消噪效果对比图
3 步态周期的非均匀性分析
将上节采集并预处理后得到的3位测试者的肌电信号,分别随机选取50个连续步态周期数据进行分析。结果发现,尽管严格设定了匀速行走条件要求,但行走中的每个步态周期并不完全相同,图3所示为测试者1(T1)的步态周期分布。
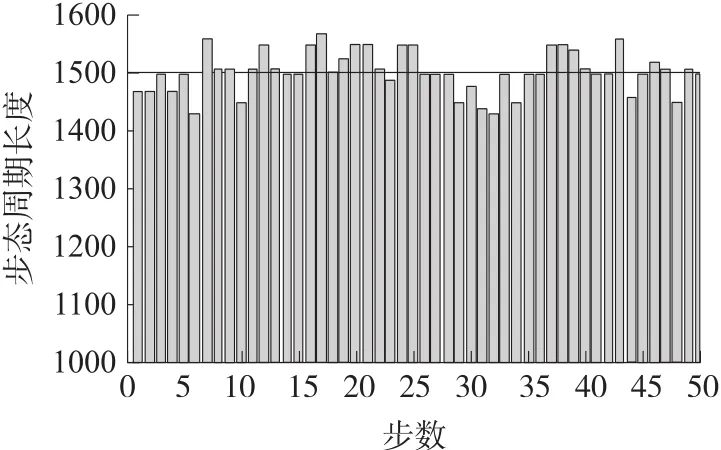
图3 匀速行走时步态周期的非均匀分布
图3中,横坐标为行走的步数,为直观方便,纵坐标用一个周期内的采样点数来表示步态周期的长度(每1 000个采样点对应的时间为1 s)。从图3看出,实际行走过程中步态周期长度出现了波动,存在非均匀(不等时)特性。这与机器设备设定匀速条件后,就能实现精确的等时周期并不一样,表现出了人体行走步态的差异性。
为了分析这种步态差异性的分布规律,先计算出50步的平均周期长度,作为基准值(平均值)。测试者1(T1)的平均周期长度为1503,另外两名测试者(T2和T3)的平均周期长度为2122和2627,代表了行走中不同身高和步频的影响。然后再计算每个周期长度与基准值的偏差百分比,按照每间隔0.5%的区间进行统计,结果见表1。
如表1所示,尽管3个测试者的平均步态周期值差异很大,但与其基准值比较后,均相对偏差基本分布在0±5%区间范围内,且在基准值附近区域的步数最多。随着绝对偏离值的增大,偏差步数总体上呈减少的趋势,具体分布如图4所示。

表1 步态偏差分布区间统计表
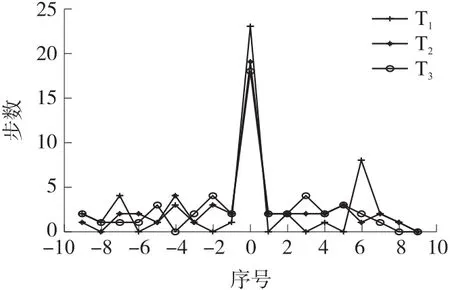
图4 步态区间分布步数统计示意图
在匀速行走情况下,虽然可以通过严格的训练来实现步调一致,尽可能减小步态周期的非均匀性,但这对于普通行人来说很难实现。另外对于不同路况和步速情况下,其周期的非等时性更为显著。因此,步态周期的这种非均匀特性是客观存在的。
4 肌电信号步态识别分析
在2.2节的基础上,对去噪后的肌电信号进行特征提取,从每一组样本序列中分别提取积分肌电值I和绝对值方差V特征,这样就得到4路肌电信号的八个特征参数,构成一组特征向量
Zi={Ii1,Vi1,Ii2,Vi2,Ii3,Vi3,Ii4,Vi4}。然后构造SVM分类器,将得到的特征样本数据按实验方案分为训练样本和测试样本集,训练集用于对SVM分类器进行训练,测试集则用于输入SVM分类器进行测试。
进行步态识别时,根据一个步态周期内不同时刻的状态位置,将步态依次划分为支撑前期、支撑中期和支撑后期,以及摆动前期和摆动后期共5个阶段。采用支持向量机(SVM)作为分类器,分别对肌电信号进行各步态阶段的识别。
为了研究步态周期的非均匀特性对识别结果的影响,对T1的50个周期步态数据组,按照偏离程度的大小重新进行分组,具体如下:
数据组Ⅰ:偏差0±0.5%,共23步;
数据组Ⅱ:偏差0.5%±3.5%,共17步;
数据组Ⅲ:偏差3.5%±5%,共10步。
首先,在数据组Ⅰ中选取训练样本,再分别对上述三组数据进行识别,其结果见表2。为叙述方便,表中第一栏“组别”下括号内两个数字的定义为:第一个数表示训练样本所在的数据组序号,第二个数表示识别样本所在的数据组序号,如(1,3)表示训练样本采用第Ⅰ组数据、识别样本采用第Ⅲ组数据得到的识别结果。以下各表中同此规则。

表2 数据I为训练样本时的识别率 单位:%
从表2中可以看出,(1,1)组的识别效果最好,平均识别率达94.6%;而(1,3)组的识别效果最差,仅为88%。通过这一结果发现,当使用偏差最小的数据组Ⅰ作为训练样本时,其对同样偏差的样本数据Ⅰ识别效果最好,而对偏差较大的样本数据Ⅲ识别效果明显下降。
再分别选用数据组Ⅱ和数据组Ⅲ作为训练样本,对上述三组数据进行步态识别,其结果分别见表3和表4。从这两个表的结果中可以看出,(2,2)组和(3,3)组的识别率较高,分别达到了92.4%和 94.2%,(2,1)和(2,3)等组的识别率较低,分别只有84.4%和86.8%。

表3 数据II为训练样本时的识别率 单位:%

表4 数据III为训练样本时的识别率 单位:%
综合上述3个表的识别结果发现:识别效果最好的均是同组别的数据,即训练样本和识别样本步态周期长度越接近,其识别效果越好。而训练样本和识别样本偏差较大的组别中,识别结果较低。这一结果表明,步态运动过程中的非均匀性特性,是影响步态识别率的一个重要因素。再结合上一节的图3和图4的结果分析发现,步态周期的这种非均匀特点具有一定的随机性。
为进一步分析步态周期偏差对识别效果的影响,从Ⅰ、Ⅱ、Ⅲ组中按比例分别随机抽取相应数据,混合得到数据组Ⅳ。再从这组数据中选取训练样本,对前述3组数据进行识别,识别结果见表5。

表5 数据IV为训练样本时的识别率 单位:%
从表5中可以看出,作为数据占比最大的(4,1)组,识别率有了明显改善,其它两组也有所提高。同时对同一状态的识别,各组的识别结果趋于稳定,波动幅度减小。因此可以得出结论,将混合数据用于识别训练,有助于提高步态识别率。同时可以看出,当步态周期偏离基准值较大时,即(4,2)、(4,3)组的识别效果仍然有待提高,这说明人体行走时会表现出一定的非均匀步态特性,并会影响步态识别率。
综合上述分析发现,普通人群的行走步态周期具有非均匀特性,且这种特征会对步态识别结果产生影响。为了消除这种影响,解决的办法分为两个方面:一是通过对行走动作的规范化训练,提高行走步态周期的一致性和均匀性;二是通过改进信号的模式识别算法,提高对非均匀周期的步态识别率。由于前者受路面自然条件、训练程度、人体个体差异及健康状况等因素限制,完全解决的可能性较小。因此,如何实现复杂行走状态下非均匀性步态的准确识别,仍是识别技术需要努力的方向。
5 结论
正常人稳定行走时步态呈现可重复性,近似于呈现周期特征,同时其步态周期也具有随机波动的特点,即非均匀性。对于下肢残障人士而言,这种步态的非均匀性特点会更加突出。本文采用基于肌电信号的步态识别方法,通过实验数据讨论了稳定匀速条件下,由于人体步态的特异性等原因,出现的步态周期的非均匀性,并探讨了这种特性对步态识别率的影响。这些发现可为进一步研究步态稳定性和步态识别率等提供有益参考。
参考文献:
[1]Yamasaki T,Nomura T,Sato S. Phase Reset and Dynamic Stabili⁃ty During Human Gait[J]. BioSystems,2003,71(1-2):221-232.
[2]Vaughan C L,Davis B L,O’connor J C. Dynamics of Human Gait [M]. Champaign,Illinois:Human Kinetics Publishers 1992.
[3]Murray M P. Gait as a Total Pattern of Movement:Including a Bib⁃liography on Gait[J]. American Journal of Physical Medicine & Rehabilitation,1967,46(1):290-333.
[4]瞿晓娜,张腾宇,王喜太,等.行走速度对步态参数影响的实验研究[J].中国康复医学杂志,2012,27(3):257-259.
[5]Park K,Dankowicz H,Hsiao-Wecksler E T. Characterization of Spatiotemporally Complex Gait Patterns Using Cross-Correlation Signatures[J]. Gait & Posture,2012,36(1):120-126.
[6]刘洋,周旭,孙怡宁,等.基于步法的跑步机速度跟踪控制方法[J].传感技术学报,2015,28(2):217-220.
[7]Kale A,Sundaresan A,Rajagopalan A,et al. Identification of Hu⁃mans Using Gait[J]. IEEE Transactions on Image Processing,2004,13(9):1163-1173.
[8]王静,吴效明.基于表面肌电的步态分析[J].中国组织工程研究,2012,16(26):4834-4840.
[9]杨鹏,刘作军,耿艳利,等.智能下肢假肢关键技术研究进展[J].河北工业大学学报,2013(1):76-80.
[10]岳华,杨鹏,陈玲玲,等.基于模糊控制的智能下肢假肢的步速调整[J].中国组织工程研究,2012,16(26):4872-4876.
[11]谭冠政,肖宏峰,王越超.智能人工腿步速测量数字电路的设计与分析[J].中南工业大学学报,2001,32(5):523-527.
[12]邢秀玉,刘鸿宇,黄武.基于加速度的小波能量特征及样本熵组合的步态分类算法[J].传感技术学报,2013,26(4):545-549.
[13]Rueterbories J,Spaich E G,Andersen O K. Characterization of Gait Pattern by 3D Angular Accelerations in Hemiparetic and Healthy Gait[J]. Gait & Posture,2013,37(2):183-189.
[14]张启忠,席旭刚,罗志增.多重分形分析在肌电信号模式识别中的应用[J].传感技术学报,2013,26(2):282-288.
[15]罗志增,沈寒霄.基于Hermite插值的小波模极大值重构滤波的肌电信号消噪方法[J].电子与信息学报,2009,31(4):857-860.
[16]佟丽娜,侯增广,彭亮,等.基于多路sEMG时序分析的人体运动模式识别方法[J].自动化学报,2014,40(5):810-821.
[17]加玉涛,罗志增.肌电信号特征提取方法综述[J].电子器件,2007,30(1):326-330.
[18]汪海燕,黎建辉,杨风雷.支持向量机理论及算法研究综述[J].计算机应用研究,2014,31(5):1281-1286.
[19]吴剑锋,吴群,孙守迁.简约支持向量机分类算法在下肢动作识别中的应用研究[J].中国机械工程,2011,22(4):433-438.
[20]Miller J D,Beazer M S,Hahn M E. Myoelectric Walking Mode Classification for Transtibial Amputees[J]. IEEE Transactions on Biomedical Engineering,2013,60(10):2745-2750.
王佳佳(1989-),女,硕士,研究方向为机器人技术、信息检测与识别,以及移动互联网相关工作;

高发荣(1969-),男,博士,硕士生导师,研究方向为机器人技术、生物力学、生物医学信息检测与模式识别,frgao@hdu. edu.cn。
Non-Uniform Characteristics and Its Recognition Effects for Walking Gait Based on sEMG*
WANG Jiajia1,2,GAO Farong1*,SUN Yao1,LUO Zhizeng1
(1.Institute of Intelligent Control and Robotics,Hangzhou Dianzi University,Hangzhou 310018,China;2.Zhejiang Dahua Technology Co. Ltd,Hangzhou 310053,China)
Abstract:The characteristics of the human physiology and motion are the important factors affecting the gait recog⁃nition. By means of the experimental data from the lower limb motion,firstly the surface electromyography(sEMG)was de-noised by the wavelet method and the feature samples were extracted,subsequently the classification and recognition were implemented by constructing the support vector machine(SVM)classifier,and the non-uniform(an⁃isochronism)characteristics of the gait cycle were discussed in detail. The results show that even in a uniform walk⁃ing condition,there still exit some non-uniform characteristics in the human gait cycle,which can affect the accura⁃cy of the gait recognition. The work has avaluable reference to further study the gait stability and recognition rate.
Key words:gait recognition;EMG;support vector machine;non-uniform characteristics
doi:EEACC:6140;7510D10.3969/j.issn.1004-1699.2016.03.014
收稿日期:2015-08-11修改日期:2016-01-18
中图分类号:TP391;TP24
文献标识码:A
文章编号:1004-1699(2016)03-0384-06
