模糊PID控制在环境温控中的应用
2016-04-27于静,方强
于 静,方 强
(1.天津科技大学电子信息与自动化学院,天津 300222;2.天津市体育局基建工程管理中心,天津300051;3.天津职业技术师范大学电子工程学院,天津 300222)
模糊PID控制在环境温控中的应用
于静1,2,方强3
(1.天津科技大学电子信息与自动化学院,天津300222;2.天津市体育局基建工程管理中心,天津300051;3.天津职业技术师范大学电子工程学院,天津300222)
摘要:目前温室大棚和植物生长柜的温度受外界环境影响波动比较大,常规的控制方法难以很好地控制环境温度。本文结合温度控制特性,针对常规PID控制自适应控制能力不强、控制效果欠佳等现象,提出一种模糊PID控制,并使用MATLAB进行验证。仿真结果表明:该控制策略具有良好的鲁棒性和稳定性,控制精度更高。
关键词:温度控制;模糊控制;控制算法;MATLAB仿真
PID控制是在工业控制中被广泛采用的较为简单、稳定、易实现的一种控制方式,即使在各种先进控制技术快速发展的现今,PID控制技术仍是最先考虑的方法且在应用中占据着最重要的位置。PID的控制性能与比例(P)、积分(I)、微分(D),这3个参数的整定直接相关。只有整定合适的参数,PID控制器才能够实现最优的控制,满足控制速度和精度[1-2]。本文分析了常规PID控制系统和模糊PID控制的特点,结合两者特点,探究模糊自整定PID控制算法,使其实现优势互补。最后,在MATLAB温控仿真实验中验证该算法的特点和优势。
1 PID控制理论
常规的PID控制系统原理框图如图1所示。其中,PID控制器中r(t)、c(t)和e(t)这3个量之间的关系为:

控制量u(t)是由比例环节、积分环节以及微分环节3者线性组合而成。而在此线性组合之前e(t)经由3者作用,从而对被控制对象进行控制,其连续形式为:

式中:KP为比例系数;TI为积分时间常数;TD为微分时间常数[3]。
PID控制器各环节的具体控制作用包括比例调节作用、积分调节作用和微分调节作用。
积分调节作用:该调解由TI的大小决定,TI越大,积分作用就越弱,超调量相应也会减小;反之积分作用越强,静差会呈减小趋势,但是超调量会增大。因此,两者间要注意把握平衡。
微分调节作用:此环节反应系统偏差的瞬时变化趋势,进行超前控制,可有效改善系统的动态性能。微分调节作用的强弱由TD数值大小决定,TD值越大,抑制误差变化的作用越强;反之,抑制误差变化的作用越弱。但是,微分调节会放大噪音干扰,故而当微分控制作用过强时,会降低系统的抗干扰能力[4-6]。
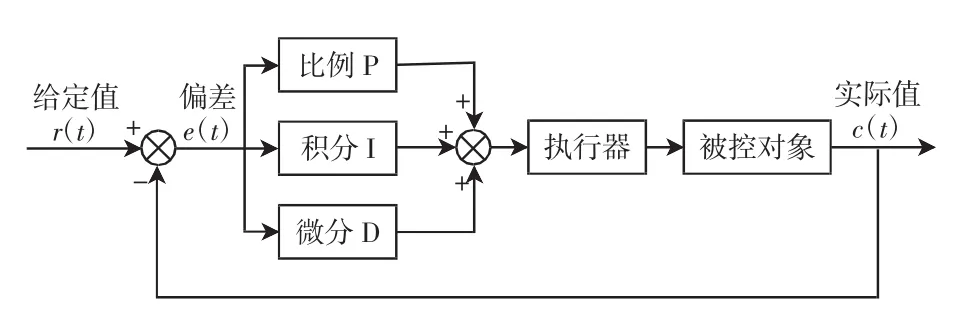
图1 常规的PID控制系统原理图
2 模糊PID控制
2.1模糊控制的基本原理
模糊控制这种算法其原理是基于模糊逻辑的,模糊控制算法原理为:被控对象的状态在控制的过程中被模糊化,经过模糊化后,就成为可用人类自己的语言所描述的模糊量,然后根据语言控制规则,再经过模糊化推理,得到输出控制量的模糊值,而执行器所执行的精确控制量,就是将这种控制量的模糊值在解模糊化模块中被转换而来,由此即可在控制中发挥作用[7-9]。其系统结构如图2所示。
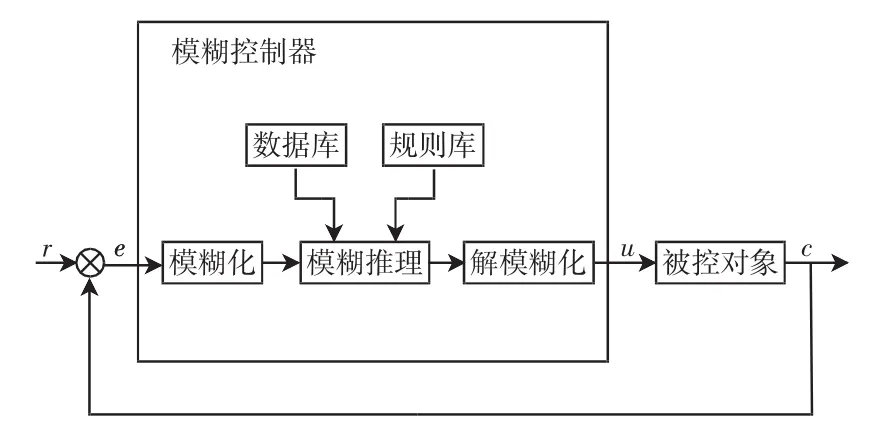
图2 模糊控制系统结构
由图2可知,模糊控制器由4部分组成。
(1)模糊化模块。模糊化模块的作用就是将与控制相关的精确的输入和输出值经过一定的规则转换成模糊的语言值,其设计步骤就是在论域上定义语言变量的过程。
(2)知识库。知识库由数据库和规则库组成。其中数据库主要是由模糊变量的取值以及隶属度函数的定义组成。规则库是由模糊语言制定的控制规则组成,这种规则是在控制中总结的实践经验。
终身成长词典的词条《154:心流》中提到,心流,是一种将个人的精神力,完全投注在某种活动上的感觉。心流产生时,会有高度的兴奋及充实感,会感到内心的纯净,对手头任务充满自信。同时很难感觉到时间的流逝,等到结束时发现几个小时已经过去了。当一个人处在心流的状态下,大脑活动的方式,会体现出高效率和准确性,耗费的能量也较少。然而,激发心流的重要条件之一,就是要做到专注。如果注意力被负面情绪分走了一大半,就不可能产生这种体验。当然,这里说的情绪主要指的是负面情绪。可见,戒掉负面情绪,你就成功了一半。
(3)模糊推理模块。所谓模糊推理,其本质就是在模糊输入下,结合相关数据以及合适的控制规则推导出输出模糊值的过程。
(4)解模糊化模块。解模糊化过程就是将在模糊推理后得到的模糊值转变成为执行器能够执行的精确的控制量,以满足精准控制的效果。常用的方法为加权平均法和最大隶属度法。
2.2模糊自整定PID控制
由于模糊控制的提出以及使用是在人们日常生活中根据实践经验所建立的,所以模糊控制不需要精确的模型对象。另外,模糊控制具有稳定性较强、响应速度快、超调量小等优点,所以比较适用于控制具有滞后性的系统。但其控制规则比较难以总结而且不能够实现在线更改。除此之外,模糊控制器缺失积分环节,所以其稳态精度低。因此,为实现快速以及精确地完成控制任务的目的,本文使用了模糊自整定PID参数的方法进行优势互补从而达到控制目的,该系统结构如图3所示。根据输入量e和ec进行模糊推理后,模糊控制器便会输出KP、KI和KD等精确的PID控制参数,再由PID控制器对温室进行控制。
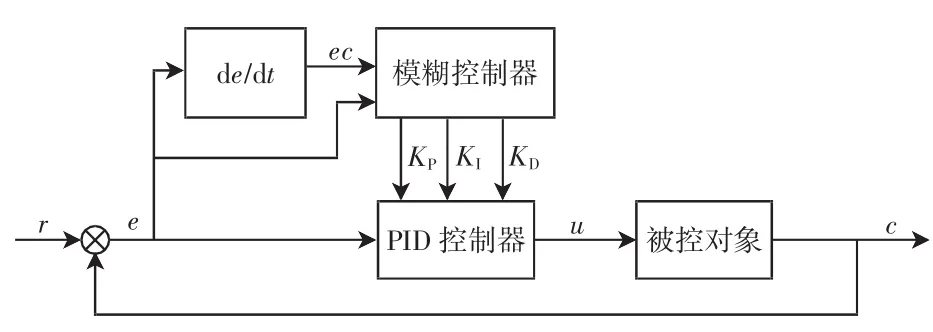
图3 模糊自整定PID控制系统结构
3 模糊自整定PID控制算法
本设计中,模糊化模块的设计步骤如下。
(1)确定输入输出变量。在现场调节控制量时,主要是依据实际的输出和输出变化率进行控制,因此模糊化模块的输入量为误差e和误差变化率ec。模糊控制器的输出控制量有3个,分别为△KP、△KI和△KD。系统中,设定温度为T,则e = T设定值- T当前值,ec = d (e当前值- e上一刻)/dt。结合现场控制的实际情况,系统设计中误差e的正负方向取值范围不能取对称,否则超调量会过大。因此,输入量e的取值范围为[-4,12]、ec的取值范围为[-1,1],输出量△KP的取值范围为[-900,900]、△KI的取值范围为[-12,12]、△KD的取值范围为[-6 000,6 000]。
(2)设计语言变量论域。在e和ec的论域上分别定义语言变量误差E和误差变化EC,在△KP、△KI和△KD的论域上分别定义语言变量控制量△KP、控制量△KI和控制量△KD。

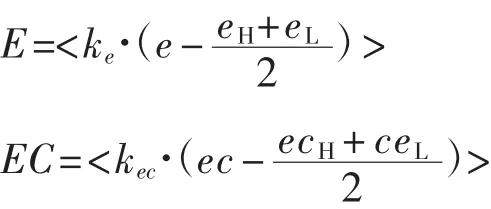
式中:<>代表取整运算。
(3)定义变量的语言值。E的模糊子集是{NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)},EC和△KP、△KI、△KD的模糊子集是{ NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)}。
(4)确定隶属函数。模糊控制器的2个输入,误差E的输入范围适中,EC的输入范围偏小,因此两者适合采用分辨率较高的三角形隶属函数。由于3个输出量的值放大了1 000倍,考虑到实际对温度的影响需要快速灵敏,因此同样采用三角形隶属函数。由于三角形函数的输入引起的输出变化比较大,所以这种函数具有较高的控制灵敏度特点,其具有较尖的形状,而且具有较高的分辨率。
(5)建立模糊控制规则。PID参数的整定需要考虑KP、KI、KD各自的作用和产生的效果。依靠实际的控制经验是模糊PID自整定控制的关键之处。所以,需要通过在实践中不断测试、修改和总结来建立一个满足控制要求的控制规则。
△KP的控制规则。△KP的值不仅关系到控制器在系统中的响应速度的快慢程度,还会使系统的偏差变小。在调节前期,为了加快系统的响应,应该将△KP值调大。而在调节中期,将△KP的值调到合适大小,以保证实现防止过大的超调量和响应速度;对于调节后期,应该适当调节△KP的值,以达到系统稳定以及防止过大超调量的产生。
△KI的控制规则。△KI可以很好地调控系统的稳态误差。通常情况下△KI的取值较小以防止积分饱和而产生较大超调量;调节中期,应适当将△KI的取值增大以发挥积分作用;调节后期,△KI的取值较大,可以有效减小系统的静态误差。
△KD的控制规则。△KD主要是调解系统的动态运行特性。调节前期,为了增大微分作用,可以调节△KD取较大的值,从而减小最终的超调量;调节中期,由于△KD的变化对动态特性影响比较大,适当减小△KD取值;调节后期,为有效减小扰动的影响,△KD的取值较小。
(6)解模糊化。模糊输出值可以经过查询模糊控制规则表得到,再通过解模糊化,转换成精确的控制量,从而实现对执行器的控制。模糊语言变量是通过对控制规则表的查询得到,对模糊语言变量的隶属度的确定,可得到准确的输出控制量。此系统采用最大隶属度法进行解模糊过程。
4 模糊PID控制在温控中的效果
该仿真试验分别采取常规PID控制和模糊自整定PID控制2种方法,并依次记录最终的控制效果。统计温度计显示的数据,每30 s记录1次,并根据这一数据绘制控制效果图。
设定执行器输出温度为30℃时常规PID和模糊自整定PID控制的温控效果图如图4和图5所示。通过分析发现,模糊自整定PID控制可以有效改善常规PID控制的超调过大问题,最终趋于稳定的时间也有所缩短,并且最终结果满足误差在±2℃范围以内的要求。
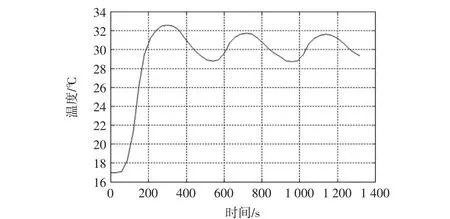
图4 设定温度30℃时常规PID控制效果图
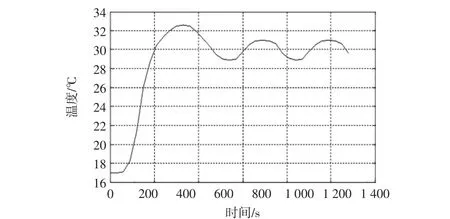
图5 设定温度30℃时模糊PID控制效果图
设定执行器输出温度为40℃时的PID和模糊自整定PID控制的温控效果图如图6和图7所示。通过比较图6和7可以看出,后者比常规PID控制的曲线显得圆滑,超调量比PID控制要小,动态特性也相对较好。同时由于绝缘油与室温的温差较大,散热效果较好,降温所需时间明显减少。
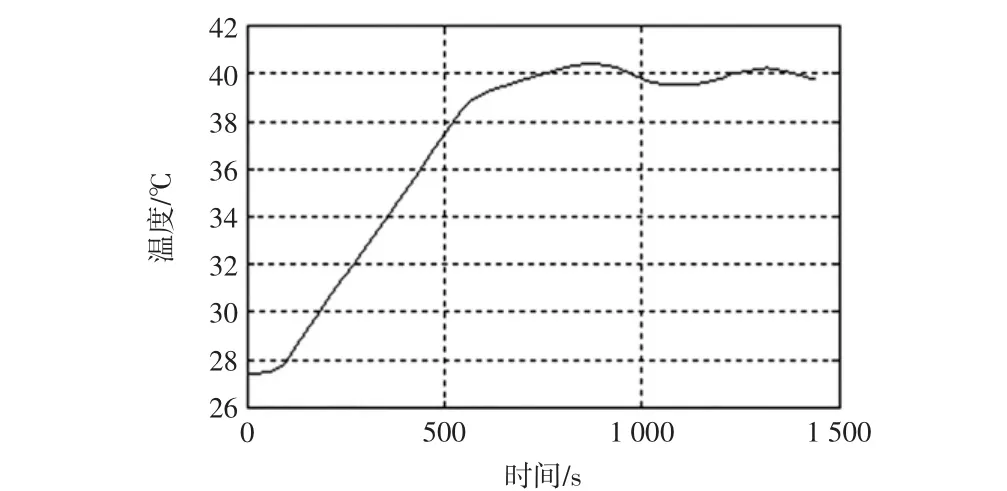
图6 设定温度40℃时常规PID控制效果图
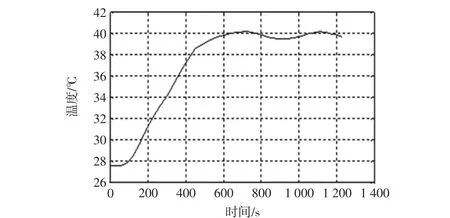
图7 设定温度40℃时模糊PID控制效果图
设定执行器输出温度为50℃时的PID和模糊自整定PID控制的温控效果图如图8和图9所示。通过比较图8和图9可以看出,对于实现适当减小超调以及改善动态特性方面,模糊自整定PID控制相对于常规PID具有优势。
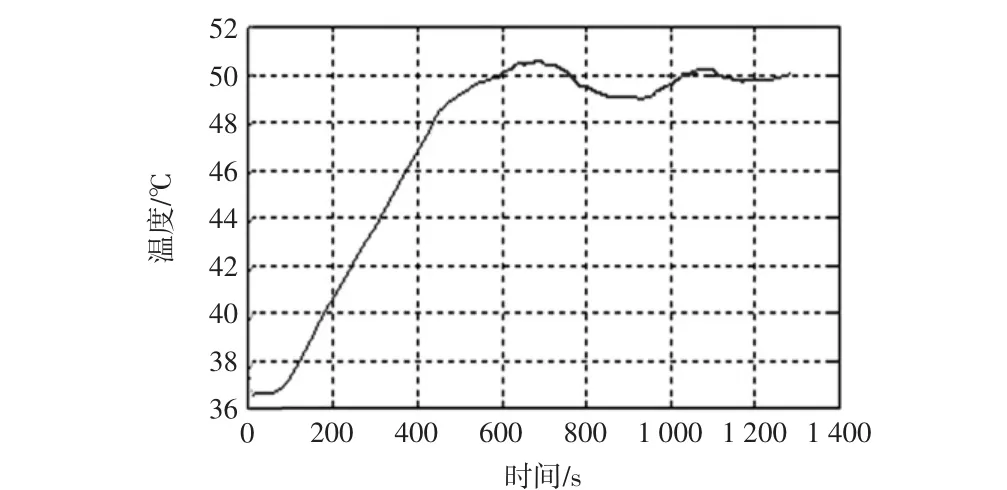
图8 设定温度50℃时PID控制效果图
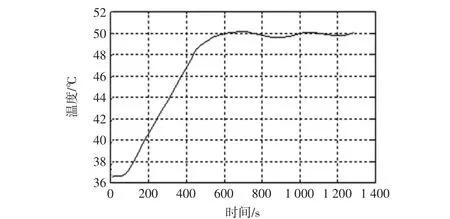
图9 设定温度50℃时模糊PID控制效果图
5 结束语
对该算法在MATLAB平台上的仿真分析可知,利用模糊自整定PID控制方法对温度进行控制比常规PID控制具有更好的鲁棒性和可靠性,能够有效地实现在农业生产、生物发酵过程中对温度的精准控制,具有较高的实际应用价值。
参考文献:
[1]李科.温控系统的智能PID控制算法研究[D].武汉:华中科技大学,2006.
[2]文科星.智能PID算法的研究及其在温度控制中的应用[D].上海:东华大学,2009.
[3]孟祥泉.PID参数自整定方法研究与控制器研制[D].大连:大连理工大学,2010.
[4]吴振阔,张亮,张波.PID参数整定和优化[J].中国高新技术企业,2010(22):16-17.
[5]仇成群,刘成林,沈法华,等.基于Matlab和模糊PID的汽车巡航控制系统设计[J].农业工程学报,2012,28(6):197-202.
[6]文乐,高林,戴义平.透平压缩机组的模糊PID控制与特性研究[J].西安交通大学学报,2011,45(7):76-81.
[7]徐春辉.基于PLC的过程控制实验装置液位模糊PID控制[J].电脑知识与技术,2011,16(7):3967-3968.
[8]陈岩,杜晓明.模糊PID控制在温室环境中的应用[J].农机化研究,2010,32(8):173-177.
[9]郭鹏.结合风轮气动特性分区的多PID切换变桨距控制[J].中国电机工程学报,2010,30(S1):153-158.
Application of fuzzy PID control temperature in the environment
YU Jing1,2,FANG Qiang3
(1.School of Electronic Information and Automation,Tianjin University of Science and Technology,Tianjin 300222,China;2.Tianjin Sports Bureau Infrastructure Project Management Center,Tianjin 300051,China;3.School of Electronic Engineering,Tianjin University of Technology and Education,Tianjin 300222,China)
Abstract:Currently the greenhouse,plant growth cabinet's temperature fluctuations in the external environment is relatively large,so it is really difficult for the conventional control method to well control the ambient temperature.Combining with some characteristics of the temperature control,as to the problems such as poor adaptive control capability for conventional PID,and the ineffective control,a fuzzy PID control is proposed,and it is verified by using MATLAB.Simulation results show that the control strategy has good robustness and stability,control more accurate.
Key words:temperature control; fuzzy control; control algorithm; MATLAB simulation
作者简介:于静(1981—),女,工程师,研究方向为控制工程.
收稿日期:2016-01-19
中图分类号:TP273.4
文献标识码:A
文章编号:2095-0926(2016)01-0045-04
