无人机路径规划的控制算法
2016-04-23柳传武张奇
柳传武,张奇
(马鞍山职业技术学院,安徽马鞍山243031)
无人机路径规划的控制算法
柳传武,张奇
(马鞍山职业技术学院,安徽马鞍山243031)
摘要:传统的无人机连续路径算法,因计算飞行路径需要一定的时间而延迟响应,很难实时控制。采用贝塞尔曲线来计算飞行路径,过程会简化很多,但要产生预期的飞行路径仍然很难实现。现将数值控制系统的直线和圆弧插补技术用于飞机转弯路径控制算法,实现实时响应,精确控制飞行路径,再结合无人机飞行高度、速度和迎角,设计了一种实现转弯路径控制算法。研究结果表明该算法简单,路径控制准确,并通过飞行测试验证了设计的合理性。
关键词:无人机;规划路径;控制算法;迎角
人们希望无人机能够运用在大面积海洋资源和陆地资源的经济调查中。常见遥控航模飞机能够覆盖的区域很小,并且不实用。传统路径规划算法不能生成满足无人机运动学约束的可飞行路径[1],如果计算机控制被采纳,利用GPS定位技术,其覆盖范围和飞行精度将大大提高。该算法考虑了无人机在起点和目标点的方向以及无人机转弯半径的约束[2],不仅能够有效控制观察区域,而且能很好利用资源,在灾难救援方面发挥了积极作用。
1基于遥控飞机的飞行路径控制和动态模型结构
遥控飞机动力模型控制框图如图1所示。

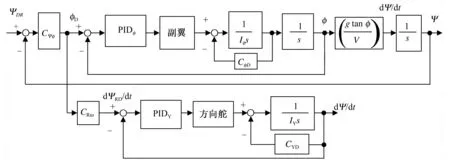
图1 遥控飞机动力模型控制框图
图中上部是垂直飞行控制框图,下部是水平过程的控制图。对于普通的遥控飞机,水平和垂直控制之间的相互作用很小,几乎可以不考虑。
对于飞行高度参数h的控制,是通过对升降机和推进器旋转速度的迎角控制来实现。推进器转矩T通过飞机飞行速度V和电机M的转速来控制。拉力D和升力L正比于飞行速度V2,因此当飞行速度增加1倍,则拉力和升力需增大4倍。当飞机飞行时,迎角θ通过CD、CL的功能作用于拉力D和升力L。为了保证平稳飞行,迎角θ要在合适的范围内进行有效控制,通过2次线性控制。预期的迎角在临界区域内被有效控制,因此迎角θ和升力L的比例系数是可控的。CL受迎角的临界角影响很大,因此,迎角θ的临界角度增加,CL、升力L也会随之增加。如果迎角的临界角被超过,θ的增加会导致CL和升力L的减小。尤其是,当θ是比迎角临界角大的数值,CL将会急剧下降,甚至变为负数,飞机将会停机或停止飞行,CD是迎角θ的二次函数。
在迎角被设置,飞行速度由控制器调整好之后,飞机飞行高度也就确定了,飞行速度大小是由拉力D的大小实现控制的。因此,在高度一定,机身水平,稳定的速度飞行,这样就实现了水平飞行控制。随着迎角θ角度增加,飞行速度V加快,升力L和飞行高度也通过PID的控制增加,反之亦然。飞机高度h和飞机的迎角θ值可以通过局部负反馈CZD、CPD的控制来确保符合预期,实现飞行稳定和减少飞行高度的差错。
航向偏差角Ψ是通过副翼的控制改变的,飞机绕x轴的倾斜角是通过操纵副翼改变的。假设变异角是φ,翻滚飞行的角速度是dψ/dt=(gtanφ/V)。绕y轴飞行的飞机是固定的,侧滑角飞行特性通过控制方向舵改变,从而实现方向的稳定性,横侧在飞机转弯的过程中也会得到控制。
2无人机的飞行轨迹控制算法
无人机虽然不断在2个点之间飞行,但是如采用点对点飞行轨迹控制算法,一定半径的回转无法维持,飞行路径不能确定,回转半径太大,这不利于定向导航[3]。点对点路径算法和规划算法飞行路径对比如图 2所示。
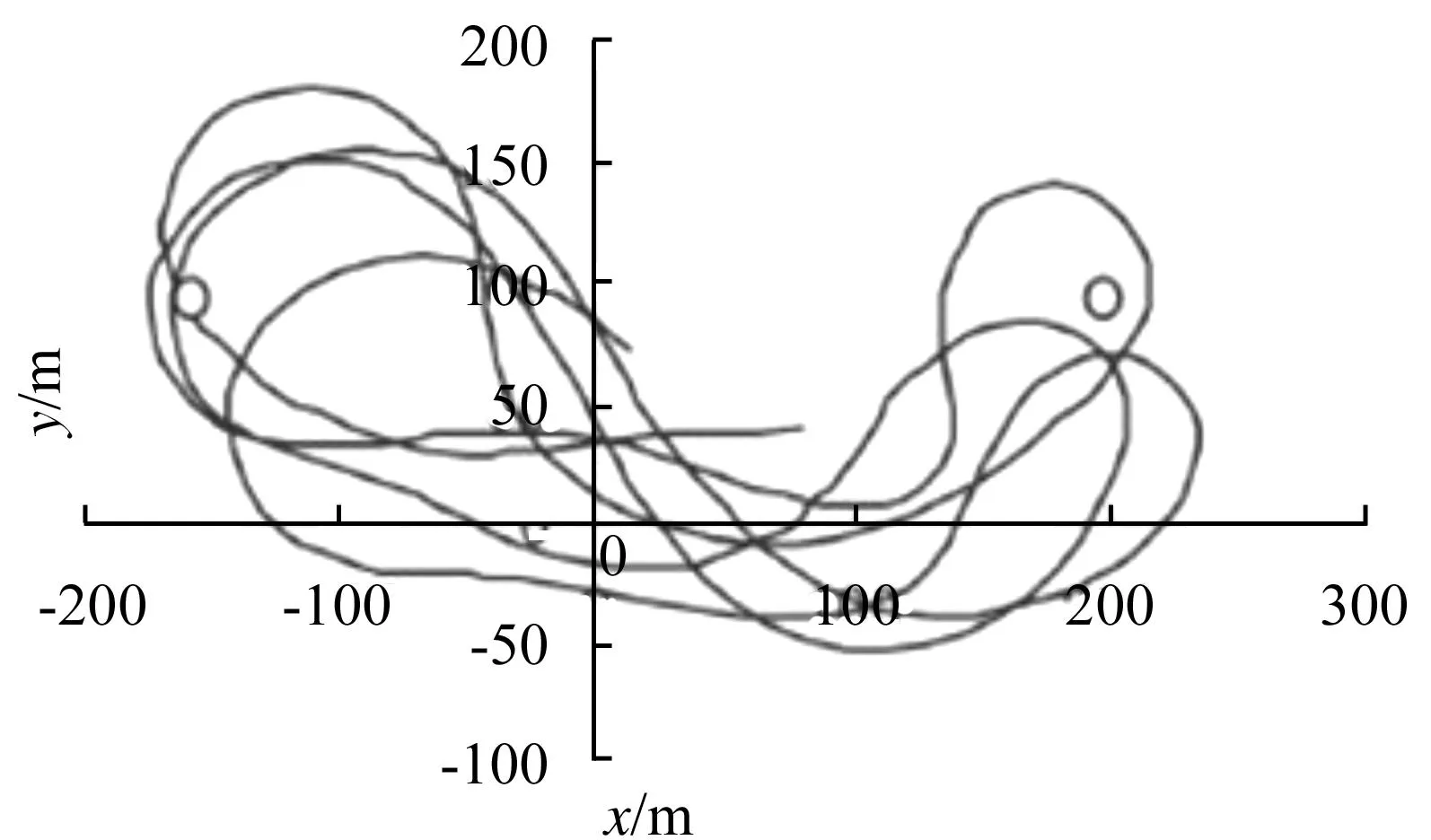
(a)点对点算法飞行路径

(b)规划算法飞行路径图2 无人机在2点之间采用点对点路径算法和规划算法飞行路径对比图
如果采用控制算法,计算连续飞行路径需要大量的时间,很难实现实时控制无人机的飞行轨迹。如果贝塞尔曲线被用来计算规划路径,虽然计算简单,但是很难产生符合期望的目标路径[4]。
直线和圆弧插补是数字控制系统中常见的用于飞机专项轨迹控制的算法,其结果是该计算时间短和飞行路径准确。该算法的步骤如下说明。
①预期的飞行轨迹采用圆形和线性来定义;
②每一步规划点的坐标采用数控插补计算;
③飞机实时位置由GPS测量传感器来定位;
④假设理想预期点和实时飞行点之间的误差为d,规划进给方向每步距离ψD。根据式(1),飞机转弯的每一步航向偏差角的预期值都计算好。
ψDR=ψD-Kdd
(1)
直线和圆弧路径、航向偏差角如图3。

(a)直线路径的航向偏差角

(b) 圆弧路径的航向偏差角图3 直线和圆弧路径的航向偏差角
⑤实际航向偏差角度ψ是通过GPS测量陀螺仪测量,所需的斜率角度Dφ是与误差信号成比例εψ=ψDR-ψ。
上述关于规划路径算法的仿真是根据图1的控制模型实现的。研究结果表明该算法简单,路径控制精确。仿真结果如图2(b)所示。
在实际的飞机滑翔机结构中,其质量小于2.5kg,有效负载是500g。机载计算机通信与控制框图如图4所示。图中,发送和接收装置用于地面监控系统实现对无人飞机控制和通信。

图4 机载计算机通信与控制框图
在规划点坐标的经度、纬度、海拔高度等位置信息被预先储存到计算机控制系统后,当前飞机的位置通过仪器测量[5]。当前位置与所需点进行比较,然后通过计算机控制系统纠正偏差。该伺服电机的动作是由脉冲调制控制接口来完成规定的高度和飞行速度[6-7]。所以,无人机按设计飞行轨迹飞行。
3试验结果
首先,通过无线电遥控将该无人机发送到120 m高空上。随后,根据计算机的控制指令,无人机飞行速度为50 km/h,而飞行高度接近预期120 m。设置速度在45 km/h,飞机出现定期波动,且有一定的高度误差。图5是所测量的飞行通过安装在无人机的前部相机,观察地面上的景观,并通过发送装置将其发送回地面站。无人机拍摄图像视野范围广阔,拍摄图像清晰,飞行轨迹明确。
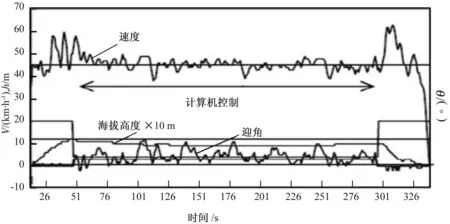
图5 无人机飞行速度、高度和迎角实验测量波形图
4结语
仿真测试验证了本算法的有效性和无人机路径规划的合理性,紧凑的小规模计算机控制系统无人机已被开发。目前它的全部控制算法和动力学模型还没有完全向用户开放,仅在理论上对飞行轨迹算法和动力学模型结构进行分析。通过飞行实验可以看出,机载计算机控制系统设计能够利用GPS测量位置信息,通过无人机规划路径算法实现对高度、速度、平衡信息有效控制,从而能够执行观察地面上的情况的任务。
[参考文献]
[1]王怿,祝小平,周洲.基于PH曲线的无人机路径规划算法[J].计算机仿真,2013(3):76-79.
[2]王怿,祝小平,周洲.一种基于Clothoid曲线的无人机路径规划算法[J].西北工业大学学报,2012(6):874-878.
[3]LONG Yan,LI Huayi,ZHANG Lihui,et al.MP2000 Autopilot and Application[J].Computer Information,2002(11):15-16.
[4]STEVENS B L,LEWIS F L.Aircraft control and Simulation[M].Hoboken:John Wiley & Sons Inc,1992.
[5]WANG Yongzhang.Digital Control Technology of Machine Tool[M].Harbin:Harbin Institute of Technology Press,1999.
[6]HE Kezhong,LI Wei.Computer Control System[M].Beijing:Tsinghua University Press,1998.
[7]刘科,周继强,郭小和.基于改进粒子群算法的无人机路径规划研究[J].中北大学学报(自然科学版),2013(4):441-447.
责任编辑:陈亮速度、高度和迎角的实验波形图。
A Control Algorithm for UAV Path Planning
LIU Chuanwu,ZHANG Qi
(Maanshan Technical College,Maanshan 243031)
Abstract:Real time control is almost impossible for traditional unmanned aircraft continuous path algorithm due to the deferred response because of the time spent on flight path calculation.Using the Bessel curve to calculate flight path can simplify the process,but it is still very difficult to generate the desired flight path.In this paper,the linear and circular interpolation technology of numerical control system is applied to control the turning path of aircraft,which can achieve real time response to system and accurate control of the flight path,thus a turning path control algorithm is designed by relating to UAV flight altitude,speed and angle of attack.The results show that the algorithm is simple with accurate path control,and its rationality is verified through flight test.
Key words:unmaned aerial vehicle;path planning;control algorithm;angle of attack
中图分类号:V279;TP301.6
文献标志码:A
文章编号:1671- 0436(2016)01- 0012- 03
作者简介:柳传武 (1974—),男,硕士,讲师。
基金项目:安徽省教育厅高等学校省级质量工程项目(2014gxk104);安徽省高校省级优秀青年人才基金重点项目(2013SQRL145ZD)。
收稿日期:2015-12-16
doi:10.3969/j.issn.1671-0436.2016.01.003
