锂电池与超级电容混合电动汽车系统在环综合测试
2016-04-21谢长君全书海谭保华
郑 悦 谢长君 黄 亮 全书海 谭保华
1.武汉理工大学, 武汉,430070
2.太阳能高效利用湖北省协同创新中心, 武汉,430068
3.湖北工业大学, 武汉,430068
锂电池与超级电容混合电动汽车系统在环综合测试
郑悦1谢长君1黄亮1全书海1谭保华2,3
1.武汉理工大学, 武汉,430070
2.太阳能高效利用湖北省协同创新中心, 武汉,430068
3.湖北工业大学, 武汉,430068
摘要:利用超级电容的功率密度高及可大电流充放电等特点,提出并设计了锂电池与超级电容双能源电电混合动力系统,建立了基于交流电力测功机的混合动力系统在环综合测试台架。采用70.4 V/40 A·h的磷酸铁锂电池组与48.6 V/165 F超级电容模组进行混合,并设计了基于综合测试台架的后向工况测试流程。最后采用UDDS动态工况,完成对基于模糊PID控制的双能源能量管理策略系统的在环测试。测试结果表明,通过混合结构及能量管理策略,锂电池组的充放电电流均限制在1 C范围内,超级电容承担大部分电流波动,保护了锂电池组。
关键词:锂电池;超级电容;UDDS工况;系统在环测试;混合系统能量管理
0引言
随着能源与环境问题的日益严峻,使用清洁能源的电动汽车具有广阔的发展前景。由于锂电池具有能量密度高、输出电压稳定等特性,目前纯电动汽车一般采用锂电池作为唯一驱动电源,而提高锂电池车载动态工况下的使用寿命是目前亟需解决的关键问题[1-2]。针对此问题,利用超级电容功率密度高、可大电流充放电等特点[3-4],本文提出并设计了一种锂电池与超级电容双能源电电混合动力系统。
双能源动力系统的关键在于如何分配两种能源的功率输出,即能量管理策略。目前混合动力系统开发常见的能量管理策略分为三类:基于简化模型或逻辑规则的策略[5],基于模糊控制及预测控制等智能控制方法的策略[6],基于动态规划与极小值原理等动态优化方法的策略[7]。其中,基于模糊逻辑控制器的控制方法在国内外应用较为广泛,如吴剑等[6]将模糊能量管理策略应用在并联式油电混合动力汽车上,采用粒子群优化方法来确定隶属度函数。经过分析,本文基于模糊控制PID算法设计了双能源能量管理策略,以实现合理分配两种能源输出功率的目的。
能量管理策略的验证评估一般采取软件仿真测试和硬件在环测试两种方法。软件仿真测试依赖于准确的模型和软件工具,如MATLAB/Simulink、ADVISOR、PSAT等软件[8]。硬件在环测试则结合了仿真模型和物理硬件,如MD Petersheim通过物理硬件和虚拟仿真之间的实时互动建立了一种半实物仿真实验平台[9]。不同于传统软件仿真和硬件在环测试方法,本文建立了一个基于交流电力测功机的混合动力系统在环综合测试台架,台架将能量管理策略嵌入到整车动力系统进行在环测试,最大程度地逼近实际车辆,对本文提出的锂电池与超级电容混合动力系统及能量管理策略进行在环测试。
1电电混合电动汽车系统在环测试台架
1.1锂电池与超级电容电电混合动力系统
鉴于超级电容具有极高的功率密度、极强的瞬时充放电能力[4]等特点,本研究提出一种锂电池与超级电容电电混合动力系统,并基于已建立的电动汽车动力系统在环测试台架进行在线测试。测试台架基本结构如图1所示,采用交流电力测功机模拟整车动态路况负载,永磁同步电机作为整车驱动电机,电机驱动能源来自于锂电池组与超级电容构成的混合动力系统,其中锂电池组直接与电机控制器相连,构成直流母线Ubus,超级电容则通过双向DC/DC转换器与母线相连。整个动力系统采用实车应用的CAN网络进行连接,主控制台IPC嵌入动力控制与能量管理单元,实现对整车动态路况的模拟和双能源的能量在线管理。

图1 电动汽车动力系统在环测试台架结构图
具体来说,本文以轻型电动汽车为模拟对象,建立的整车模型参数与动力系统配置如表1所示,其中锂电池组由22节40 A·h磷酸铁锂电池串联构成,故直流母线额定电压设计为70.4 V,超级电容模组由两组48.6 V/165 F商用Maxwell超级电容模块并联构成。

表1 整车参数与动力系统配置
1.2动力系统后向工况测试流程
如图1所示,测试台架采用后向测试模式,即根据表1所示整车参数、通过ADVISOR仿真软件离线导出了整车动态工况数据库,包括电机扭矩及转速数据库。控制台测试软件首先调用离线动态工况数据库,并通过CAN总线实时发送扭矩TM及转速nM(已知控制变量)到电机,从而控制永磁同步驱动电机的实时扭矩,以及控制测功机交流电机的实时转速;测试软件调用能量管理EMS模块,获得双向DC/DC转换器的输出电流IDC(目标控制变量),并通过CAN总线实时控制DC/DC转换器的输出。
测试系统中,驱动电机的扭矩、负载电机的转速是计算电机需求功率的两个重要参数。采用高精度HBMT40扭力环作为测试台架的电机扭矩及转速监测装置,它连接在牵引电动机与连接轴之间,扭矩额定量程为500 N·m到3000 N·m,以±10 V模拟电压量输出。采用法国C.A单相电能质量分析仪CA8230对锂电池组的逆变交流电进行质量分析,质量分析结果及数据上传到工控机保存。HBTT40扭力环与CA8230电能质量分析仪详细记录扭矩、转速、锂电池组电流、电压等数据,对混合动力系统进行更精确的数据管理。
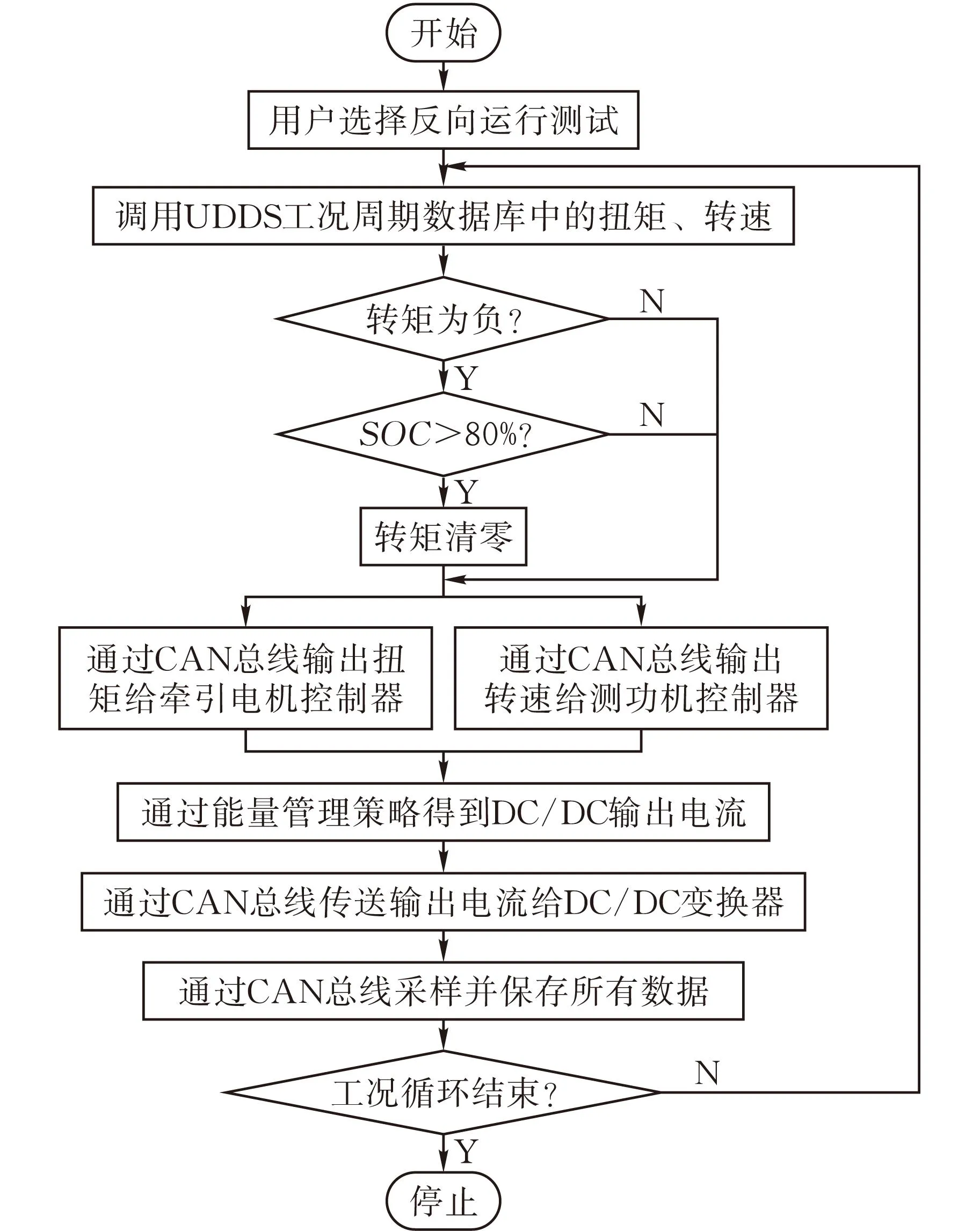
图2 后向工况测试流程图
后向工况测试流程如图2所示,在它的一个循环中选择后向运行测试,测试软件调用动态工况数据库的电机扭矩、转速两个变量。测试软件对当前电机状态、锂电池SOC状态(由CAN总线实时采集)进行检测,当电机扭矩为负值且SOC值大于充电上限80%时,将扭矩置0;反之,若电机扭矩非负且锂电池组的SOC值安全,则将扭矩发送给永磁同步驱动电机,测功机交流电机也获得转速(电机设定为转矩控制模式,驱动电机和交流电力测功机同轴运转,驱动电机处于转矩控制模式,则测功机处于转速控制模式)。将转矩值和转速值代入电机功率计算公式PM=TMnM/9550中,得到电机需求功率PM,工控上位机根据需求功率PM、锂电池组SOC值确定DC/DC控制器的输出电流IDC,此即能量管理策略的应用;最后,在完成数据采集后,单次采样周期的控制回路结束。所有变量的测量值和输出控制变量通过CAN总线传送,在动态工况整车后向循环测试的每个采样周期中将产生三个控制变量,即扭矩TM,转速nM和DC/DC控制器输出电流IDC。其中,扭矩TM、转速nM是已知的控制变量,因此,后向测试最重要的目标就是从EMS获取IDC模块。
2双能源能量在线管理策略
在整车运行的不同时间阶段,电动汽车对应着不同的需求功率。双能源的工作模式是锂电池组承担基本驱动或制动吸收功率需求,超过基本功率部分由超级电容承担。控制台内嵌能量管理模块EMS,具体实现超级电容与锂电池组双能源能量在线管理,其控制对象为DC/DC的输出电流IDC。
当整车处于起步阶段或者整车处于匀速状态,电机需求功率较低,锂电池组单独驱动电机并给超级电容组充电,动力输出如下:
(1)
其中,下标LI表示锂电池组,下标CAP表示超级电容;ηLI_CAP或ηCAP_LI为DC/DC双向能量调节器功率转换率。
整车加速爬坡时,电机需求功率高,超级电容和锂电池组共同驱动电机,超级电容的高功率密度保证超级电容能加速放电,瞬间释放极高的能量,保证锂电池相对平稳地放电,双能源供能表达式如下:
(2)
当整车制动时,驱动电机向直流母线回馈制动能量,锂电池组回收电机平均制动功率,超级电容回收峰值制动功率,超级电容的高功率密度保证超级电容减速充电,瞬间吸收极高的能量,从而保护锂电池,双能源回收制动能量表达式如下:
(3)
由图1测试台架的基本结构可知,超级电容通过双向DC/DC转换器与母线相连,从而转换成稳定可靠的直流电源;锂电池组、DC/DC转换器的输出相并联,它们的输出电压都等于直流母线电压Ubus。由IDC、Ubus和PM可以推算出超级电容、锂电池组的功率,即得到双能源之间的功率关系,其推算公式如下:
(4)
PDC=PCAPηDC=UbusIDC
(5)
式中,PDC为DC/DC变换器的输出功率;PLI为锂电池组的输出功率;PM为电机功率;PCAP为超级电容的输出功率;ηDC为DC/DC变换器的功率转换率;ηM为电机功率转换率。
EMS根据动态路况负载和双能源实时状态,通过控制IDC来调节期望的直流母线电压Ubus。当直流母线电压正偏离目标值时,IDC将负调节(IDC<0,超级电容充电),这表明超级电容将吸收通过DC/DC变换器的直流母线的能量;当直流母线电压负偏离目标值,IDC将正调节(IDC>0,超级电容放电),这表明超级电容将通过DC/DC变换器释放能量给直流母线。IDC的绝对值随着偏离度的增大而增大。
为确定DC/DC控制器的输出电流IDC,本研究在系统中建立了模糊PID控制器。具体来说,首先模糊控制有两个输入量,其一为实际直流母线电压Ubus与期望直流母线电压Up之偏差E=ΔU=Ubus-Up,其二为电压偏差的变化率EC=dΔU/dt;输出量是DC/DC变换器的输出电流IDC。在模糊控制算法中,基于简单解析式的模糊推理规则将E、EC和N的域设置为相同的,即E=EC=N={-m,…,-1,0,1,…,m},m为域边界。控制变量N可以由下式推导:
(6)
式中,N为模糊域设值,N∈(0,1);α为误差值E的加权系数。
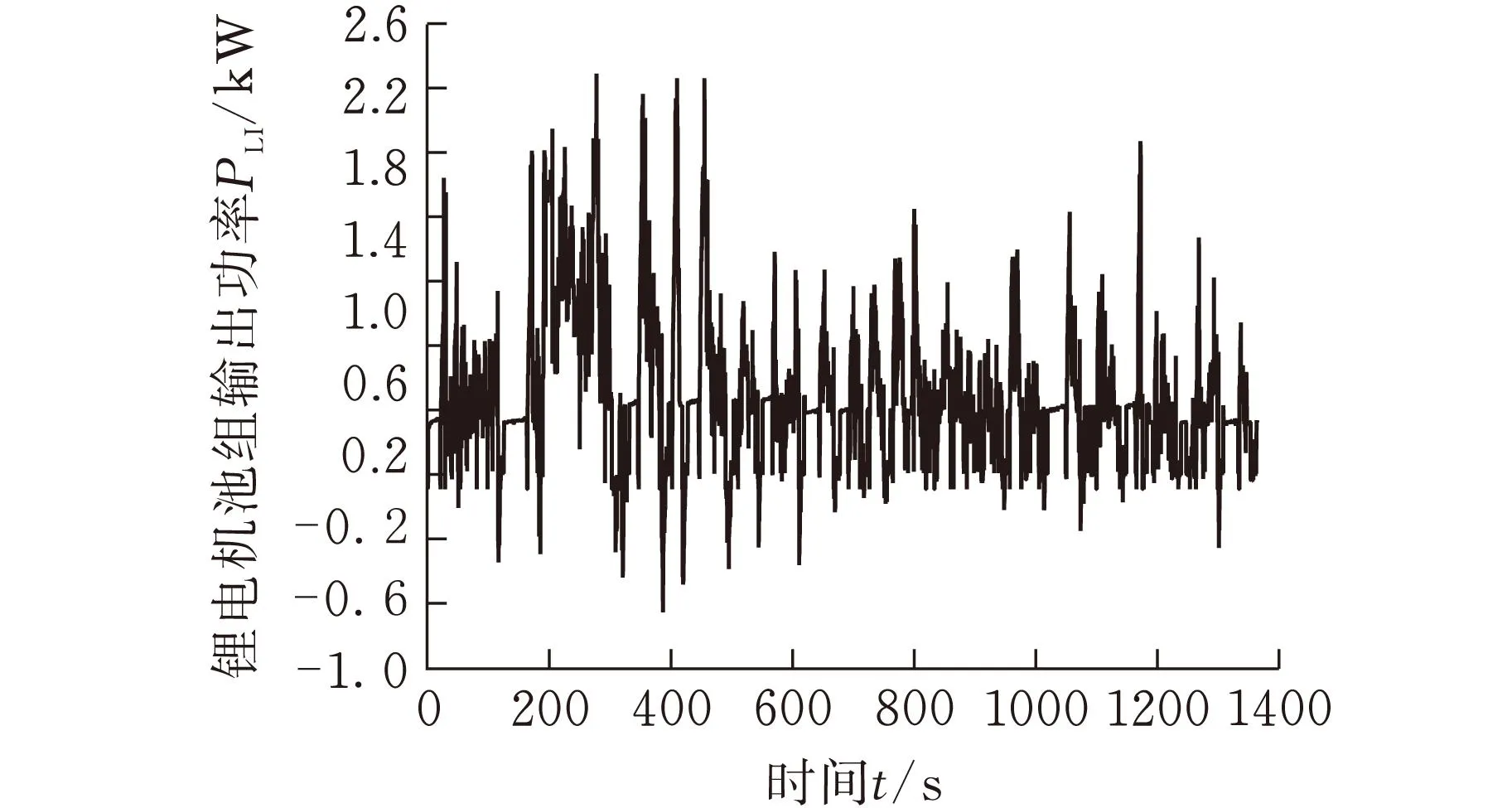
在具有较大误差的控制处理的初始阶段,其主要目的是要消除误差,因此误差值E的加权系数α应该更大。当控制过程趋于稳定阶段,误差较小时,主要目的是减小超调,则需要偏差变化率EC的加权系数(1-α)更大。因此,误差E>m/2时,令α=0.35;误差E 在此基础上结合PID控制算法,利用模糊控制器来给PID控制器在线自整定PID参数IDC,即以DC/DC输出电压(数值上等于Ubus)为目标输出值,以DC/DC输出电流IDC为输入控制量,采用PID算法推出DC/DC输出电流值IDC。这样,构成的模糊自整定参数PID控制器,能更加适应非线性且时变的双能源系统,通过确定与调节N的值后,即可实现超级电容与锂电池组双能源能量的在线管理。 3基于UDDS工况的系统后向在环综合测试与分析 3.1UDDS工况 为模拟并测试混合动力系统的动态性能,本文结合驱动电机的参数、超级电容的功率特性等因素,选择动态波动较大的UDDS工况模拟整车负载。UDDS工况为美国环境保护署EPA制定的城市道路循环工况。UDDS工况如图3所示。 图3 UDDS工况 根据图3可以得到UDDS工况的具体参数:一次循环时间为1367 s,行驶路程为11.99 km,最高车速为91.25 km/h,平均车速为31.51 km/h,最大加速度为1.48 m/s2,最大减速度为-1.48 m/s2,空载时间259 s,停车次数为17。 3.2面向系统能量管理的后向在环测试与分析 调用系统内嵌控制策略进行工况仿真测试,驱动电机、测功机在UDDS工况下运行,循环执行多次后取其中一次所得数据绘制成曲线,其中永磁同步驱动电机反馈的实时扭矩与时间的关系如图4所示,三相异步交流电力测功机反馈的实时转速与时间的关系如图5所示。与UDDS标准工况的转矩/转速-时间曲线对比,电机的实际转矩、转速较好地跟随了设定的转矩、转速值,整车较好地实现了后向仿真运行,电机的驱动性能良好。 图4 工况模拟下的驱动电机转矩曲线 图5 工况模拟下的测功机转速曲线 锂电池组在UDDS工况下的输出电流及SOC值变化曲线如图6、图7所示。由图6可知,锂电池组电流ILI最大值不超过35 A,锂电池组的放电电流的保持在较低水平(额定容量内);整个工况时间中,电流ILI存在负值,说明在动态运行的过程中锂电池组被充电。总之,锂电池组的输出、输入电流处于一个安全范围内,充放电电流均限制在1C。由图7可知,锂电池组SOC初始值为67.2%,在一个UDDS工况循环后被下拉了8.8%,终值为58.4%,即在工况运行下锂电池组电荷是被消耗的。锂电池组由独立电池管理系统BMS进行管理。 图6 锂电池组电流变化曲线 图7 锂电池组SOC值变化曲线 超级电容组在UDDS工况下的输出电流、输出电压变化曲线如图8、图9所示。由图8可知,超级电容的最大放电电流约为300 A,最大充电电流约为350 A。由图9可知,超级电容的初始电压值为46.8 V,终值为45.2 V(接近初始值),最小电压为25 V;图9中上方的曲线表示整个运行中的锂电池组与驱动电机并联下的直流母线电压Ubus,它一直保持在比较平稳的水平(69.5 V~72.4 V),在期望直流母线电压Up=70 V上下浮动。 图8 超级电容组输出电流变化曲线 图9 超级电容和直流母线输出电压变化曲线 本平台通过能量管理控制策略对DC/DC的给定电流IDC值进行了预测,从而实现对超级电容和锂电池组输出功率的最佳配置。电机需求功率、超级电容输出功率、锂电池组输出功率如图10、图11所示,它们三者的功率供需体现出不同工作模式下动力系统的功率守恒关系。首先,锂电池组由于其自身的电压-电流特性而具有较大的功率波动。其次,锂电池组放电、充电功率都较小,相应地,超级电容的最大放电功率约8 kW,最大充电功率约9 kW,其功率变化曲线和电机需求功率变化趋势是一致的。 图10 电机需求功率与超级电容输出功率 图11 锂电池组输出功率 由此可以得出结论:混合动力系统可以充分利用双能量源的特性。在整个UDDS工况循环运行下,双能源(锂电池组和超级电容)为快速适应动态负载的要求而不断调整其输出功率,锂电池组能量密度高但功率密度低,而超级电容具有有限的存储容量但可以在加速阶段提供瞬态大功率。因此,双能源的配置合理,这种配置方式充分利用了超级电容的高功率密度的特性,降低了锂离子电池的循环使用次数且可避免大电流对锂离子电池的损害,从而提高了锂电池组的使用寿命。 4结语 本文设计了一个以锂电池组与超级电容并联的双能源混合动力系统,并采用交流电力测功机模拟动态路况负载、永磁同步电机为驱动电机,建立了混合动力系统的在环综合测试台架。基于该混合动力系统,研究了基于模糊PID控制算法的双能源能量管理策略。在UDDS工况下对此系统进行了后向在环综合测试与分析,仿真结果表明超级电容能满足瞬时动态负载的要求,锂电池组与超级电容给动力系统提供了稳定的直流母线电压、电流和输出功率,即能量管理系统对双能源的输出功率进行了合理的配置,且超级电容承担了大部分电流波动,限制了锂电池组的充放电电流。下一步将继续深化研究锂电池与超级电容的能量管理策略,并完善提高综合测试台架的控制和检测精度。 参考文献: [1]熊奇,唐冬汉.超级电容器在混合电动车上的研究进展[J].中山大学学报(自然科学版),2003,42(增1):130-133. Xiong Qi, Tang Donghan. Super Capacitor on the Progress in Hybrid Electric Vehicle[J]. Journal of Sun Yat-sen University (Natural Science Edition), 2003, 42(S1):130-133. [2]王震坡,孙逢春.锂离子动力电池特性研究[J].北京理工大学学报,2004,24(12):1053-1057. Wang Zhenpo , Sun Fengchun . Lithium Ion Power Battery Characteristics [J] . Journal of Beijing Institute of Technology, 2004, 24(12):1053-1057. [3]宋永华,阳岳希,胡泽春.电动汽车电池的现状及发展趋势[J].电网技术,2011,35(4): 1-7. Song Yonghua, Yang Yuexi, Hu Zechun. Current Situation and Development Trend of Electric Vehicle Battery [J]. Power System Technology, 2011, 35(4): 1-7. [4]李卫民.混合动力汽车控制系统与能量管理策略研究[D].上海:上海交通大学,2008. [5]贠海涛,赵玉兰,姚杰.基于动态逻辑规则的燃料电池汽车能量优化管理策略[J]. 高技术通讯,2011,21(4):428-433. Yuan Haitao, Zhao Yulan, Yao Jie. Energy Optimization Management Strategy for Fuel Cell Vehicle Based on Dynamic Logic Rule [J]. High Tech Communication, 2011,21(4):428-433. [6]吴剑,张承慧,崔纳新.基于粒子群优化的并联式混合动力汽车模糊能量管理策略研究[J].控制与决策,2008, 23(1):46-50. Wu Jian, Zhang Chenghui, Cui Naxin. Particle Swarm Optimization of Parallel Hybrid Electric Vehicle Based on Fuzzy Energy Management Strategy[J] . Control and Decision, 2008, 23(1): 46-50. [7]Hu X,Murgovski N,Johannesson L M,et al.Comparison of Three Electrochemical Energy Buffers Applied to a Hybrid Bus Powertrain with Simultaneous Optimal Sizing and Energy Management[J]. IEEE Transactions on Intelligent Transportation Systems, 2014,15(3): 1193-1205. [8]魏健,谢辉.基于Simulink的整车行驶模型的建立与仿真[J].天津工程师范学院学报,2007,17(2):38-39. Wei Jian, Xie Hui. The Establishment and Simulation of the Vehicle Model Based on the Simulink[J]. Journal of Tianjin University of Technology and Education, 2007,17(2):38-39. [9]谢起成,王冬,田光宇.混合动力电动汽车(HEV)动力系统试验台的模块化设计研究[J].交通运输工程学报,2001,1(2):32-33. Xie Qicheng, Wang Dong, Tian Guangyu. Hybrid Electric Vehicle (HEV) Research on Modular Design of Dynamic Test System[J]. Journal of Traffic and Transportation Engineering, 2001, 1(2):32-33. (编辑王旻玥) Powertrain in Loop Test System of Hybrid Electric Vehicles Combined Lithium Battery and Super Capacitor Zheng Yue1Xie Changjun1Huang Liang1Quan Shuhai1Tan Baohua2,3 1.Wuhan University of Technology, Wuhan, 430070 2.Hubei Collaborative Innovation Center for High-efficiency Utilization of Solar Energy,Hubei University of Technology, Wuhan,430068 3.Hubei University of Technology, Wuhan, 430068 Abstract:A hybrid power system combined lithium battery and super capacitor was proposed and designed by using super capacitor’s advantages, such as high power density and better charge and discharge properties. A powertrain in a loop test bench was established based on the AC electrical dynamometer. Secondly, the test station powered by a 70.4V/40A·h lithium battery pack and two 48.6V/165F super capacitor bank was designed and constructed on the basis of stand-alone module. The backward test method was designed for the powertrain test bench. Finally, a fuzzy-PID controller was devised for the energy management of hybrid powertrain and an UDDS driving cycle was carried out. The test results show that the charge and discharge currents of lithium battery pack are restricted below 1C, and the most current fluctuation is undertook by super capacitor bank, which can protect the lithium battery pack. Key words:lithium battery; super capacitor; UDDS driving cycle; powertrain in loop test; energy management of hybrid powertrain 作者简介:郑悦, 女,1991年生。武汉理工大学自动化学院硕士研究生。主要研究方向为汽车测试平台。谢长君(通信作者),男,1980年生。武汉理工大学自动化学院教授。黄亮,男,1979年生。武汉理工大学自动化学院副教授。全书海,男,1955年生。武汉理工大学自动化学院教授、博士研究生导师。谭保华,男,1978年生。太阳能高效利用湖北省协同创新中心工程师,湖北工业大学理学院副教授。 中图分类号:U469.72 DOI:10.3969/j.issn.1004-132X.2016.06.021 基金项目:国家重点基础研究发展计划(973计划)资助项目(2013CB632505);国家自然科学基金资助项目(51477125, 61374050);湖北省科技支撑计划资助项目(2014BEC074) 收稿日期:2015-05-18