基于 PLC 和 MCGS 软件在仿真实验教学系统的设计与实现
2016-04-18陈琴
陈琴

摘 要:因为PLC技术在自动控制领域占有重要的地位,所以PLC技术已成为高校电类专业的必修课程。本文将PLC技术与MCGS组态软件相结合,将其运用到PLC课程的实践教学中来,设计并实现了PLC仿真实践教学系统。实践证明,在教学中运用该系统提高了学生对工业过程控制的感性认识,从而提高了教学质量。
关键词:MCGS;仿真;实验教学;PLC 中图分类号:TN914 文献标识码:C 收稿日期:2015-12-14
为顺应社会需求,高校中的电子专业、电气专业等相关专业都已将PLC作为一门必修的专业基础课或专业课程纳入教学大纲。[1]但是在教学中存在一些问题,比如说学生对PLC在自控领域的应用缺乏感性认识,对工作原理理解不透,对课程缺乏兴趣等。
为解决上述问题,本文以立体仓库为例,设计了仿真实验教学系统,将PLC技术与MCGS组态软件相结合,并将其引入教学、实验环节进行教学实践。
1.仿真实验系统的构成
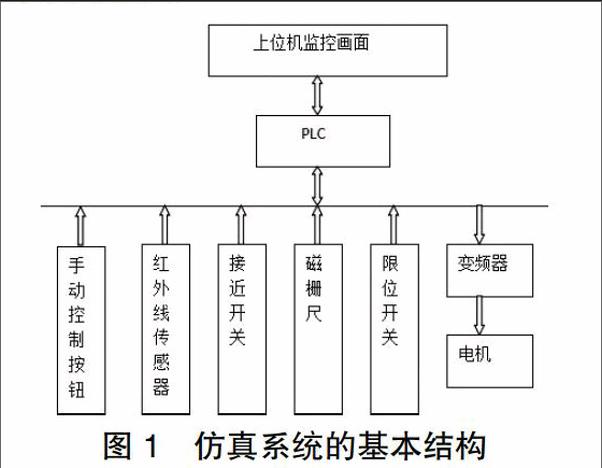
本系统由上位机监控系统、可编程控制器(PLC)、外围设备组成。上位计算机中安装PLC编程软件和MCGS组态软件,其主要功能是通过MCGS软件中的仿真监控画面,对立体仓库运动过程进行仿真和监控。[2]下位机采用S7-200型PLC,上位机与下位机通过PC/PPI电缆连接进行通信。除此之外,还有PLC的外围设备。系统的基本结构如图1所示。
2.系统的硬件设计
(1)I/O分配。系统分为三个子系统:立体仓库子系统、自动车库子系统、升降机控制子系统。每个子系统可以单独运行,进行仿真实验。三个子系统共用一个PLC和外围设备,每个子程序有各自对应的I/O分配。
(2)系统的硬件接线图。立体仓库中最关键的机构是堆垛机,本立体仓库子系统主要仿真堆垛机的运行过程。堆垛机有三个方向的运动:Z方向的伸叉运动、X方向的行走运动、Y方向的升降运动,分别由三台电动机控制。磁栅尺被安装在仓库里,堆垛机的升降位置可以被磁栅尺检测到,然后通过数字I/0口信号转移到PLC,PLC通过阅读来自传感器的信号控制电机运行,实现堆垛机可靠定位和安全运行。
3.软件设计(MCGS)
(1)控制要求分析。系统启动,根据出入库要求,自动将货物搬运到指定的位置,结束操作。整个系统分为出库操作和入库操作两个大的模块。已入库为例,在进行入库作业时,货叉要上升到上浮位置,货叉运行机构将货叉伸出,然后货叉下降到下浮位置,这样货叉才能将货物放到指定的货位上,货叉运行机构将货叉缩回。系统再次扫描指定货位的货物有无检测传感器,如果此时检测到指定货位上有货物,则堆垛机回归初始位置等待下一命令。
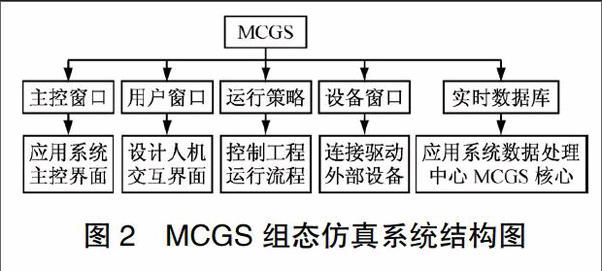
(2)MCGS组态仿真软件设计。MCGS 组态仿真系统结构图如图2所示,根据控制要求,分别对结构图中的各环节进行组态。
①用户窗口设计。立体仓库画面如图3所示。仿真软件设计首先是组态画面的设计,为了使仿真效果更加形象,增加了如库位显示的指示灯,还有堆垛机运动的动画等。②实时数据库。实时数据库是系统的核心,也是系统的处理中心,系统各部分均以实时数据库数据公用区进行数据交换、数据处理和实时数据的可视化处理。完成实时数据库建立后,将组态画面与实时数据联系起来,建立动画连接。③运行策略。运行策略是指对监控系统运行流程控制的方法和条件,它能够对系统执行某项操作和实现某种功能进行有条件的约束。
本文仿真实验系统,该系统除了保证完成计划内的实验教学任务外,还实行开放式管理,具有综合性和开放性的特点,既能开设多个教学实验,又调动了学生做实验的积极性,主动性大大提高。
参考文献:
[1]曹辉,霍罡.可编程控制器系统原理及应用[M].北京:电子工业出版社,2003.
[2]徐菱,等.基于PLC的堆垛机控制系统设计[J].组合机床与自动化技术,2005,(1):72-73.
