改进A-U模型视角下我国战略性新兴产业的发展路径研究——以机器人产业为例
2016-04-15张慧颖王丽苹张颖春陈根来
张慧颖, 王丽苹, 张颖春, 陈根来
(1.天津大学管理与经济学部,天津 300072; 2.天津市委党校哲学部,天津300191; 3.天津市社会科学界联合会,天津300051)
改进A-U模型视角下我国战略性新兴产业的发展路径研究
——以机器人产业为例
张慧颖1, 王丽苹1, 张颖春2, 陈根来3
(1.天津大学管理与经济学部,天津 300072; 2.天津市委党校哲学部,天津300191; 3.天津市社会科学界联合会,天津300051)
摘要:机器人产业是典型的战略性新兴产业。通过案例分析,揭示我国迎接《中国制造2025》所面临的机遇与挑战。从传统的技术创新动态模型(A-U模型)出发,将美国、日本和中国的机器人产业进行比较分析。结果表明,我国机器人产业演化具有与传统A-U模型的反向规律,并以此为依据建立了新的A-U模型,针对新的A-U模型和我国新兴产业发展所面临的困境,提出了推动我国战略性新兴产业的发展路径与对策。
关键词:机器人产业; A-U模型; 发展路径
战略性新兴产业是全球关注的热点,也是中国产业发展的重点。当今世界,发达国家基本都处在工业3.0(自动化)向4.0(工业智能化)发展的阶段,而我国大多数工业企业仍需要补上工业2.0(电气化)到工业3.0(自动化)的发展过程,然后才能向4.0发展。在未来的一段时间里,我国工业发展仍然面临着稳增长、调结构的双重困境以及来自发达国家与新兴经济体的双重挤压,陷入了低成本竞争优势迅速递减,同时新优势还未形成的两难局面。攻坚克难的关键时期,每一个产业都必须由价值链的低端向高端攀升,否则,众多新兴产业必将拥挤在低洼地带,面临着路径依赖以及低端锁定的风险,因此,能否实现技术创新与突破将直接决定我国工业企业能否参与国际竞争的能力与水平。
机器人产业是技术密集型产业,是典型的高端装备制造业。2014年6月9日,在召开的两院院士大会上,习近平总书记曾指出,机器人是“制造业皇冠顶端的明珠”,提出不仅要努力提高我国机器人产业技术水平,还要尽最大可能占领市场。2015年5月19日,备受瞩目的《中国制造2025》规划正式对外发布,规划明确指出未来我国制造业发展方向为“智能化”,同时明确了我国制造业发展的十大重点领域,其中特别提出了高档数控机床和机器人产业。基于此,本文选择了机器人产业作为案例,剖析其技术创新模式。目的在于为后发国家应对产业技术发展瓶颈提供路径选择和决策依据。
从技术创新的角度研究产业发展,最著名的是技术创新动态模型,即“A-U”模型,它的提出者是来自美国哈佛大学的阿伯纳西以及美国麻省理工学院教授厄特巴克,分析样本来自美国众多的行业案例。该模型认为,产品生命周期中,各阶段的创新数量以及类型分布具有可预见性,基于此可以描述在产品生命周期中所呈现的不同技术创新分布形式。本文所探讨的3种不同技术创新形式分别来自于美国、日本和中国。美、日、中是机器人产业发展的的3个典型国家。1954年,世界第一台机器人诞生于美国,无疑美国在此产业中首先占据了主导地位;日本后来居上 , 超越美国成为机器人产业的霸主;中国作为后起国家,近年来机器人总销量迅猛增加,于2013年超过日本,成为了全球第一大工业机器人市场,但仍处于产业链低端,难以实现突破发展。在世界机器人产业发展进程中,不同国家创新分布模式不同,它们是否都符合A-U模型所呈现的发展规律?这种差异又能带给我国战略性新兴产业发展什么启示呢?本文通过案例比较分析,从改进的A-U模型解答上述问题。
一、 文献综述
1. 传统A-U模型的建立
20世纪7 0年代,美国哈佛大学的阿伯纳西和麻省理工学院的厄特拜克就曾对产品创新、工艺创新以及组织机构进行过研究,从产品生命周期理论的视角对众多行业进行案例分析, 发现它们之间既有各自的发展规律, 又有相互联系的纽带, 它们协同发展共同影响着产业的发展。之后又通过引入主导设计的概念, 以产品创新为中心, 提出了技术创新动态模型(A-U模型)[1-2](见图1)。
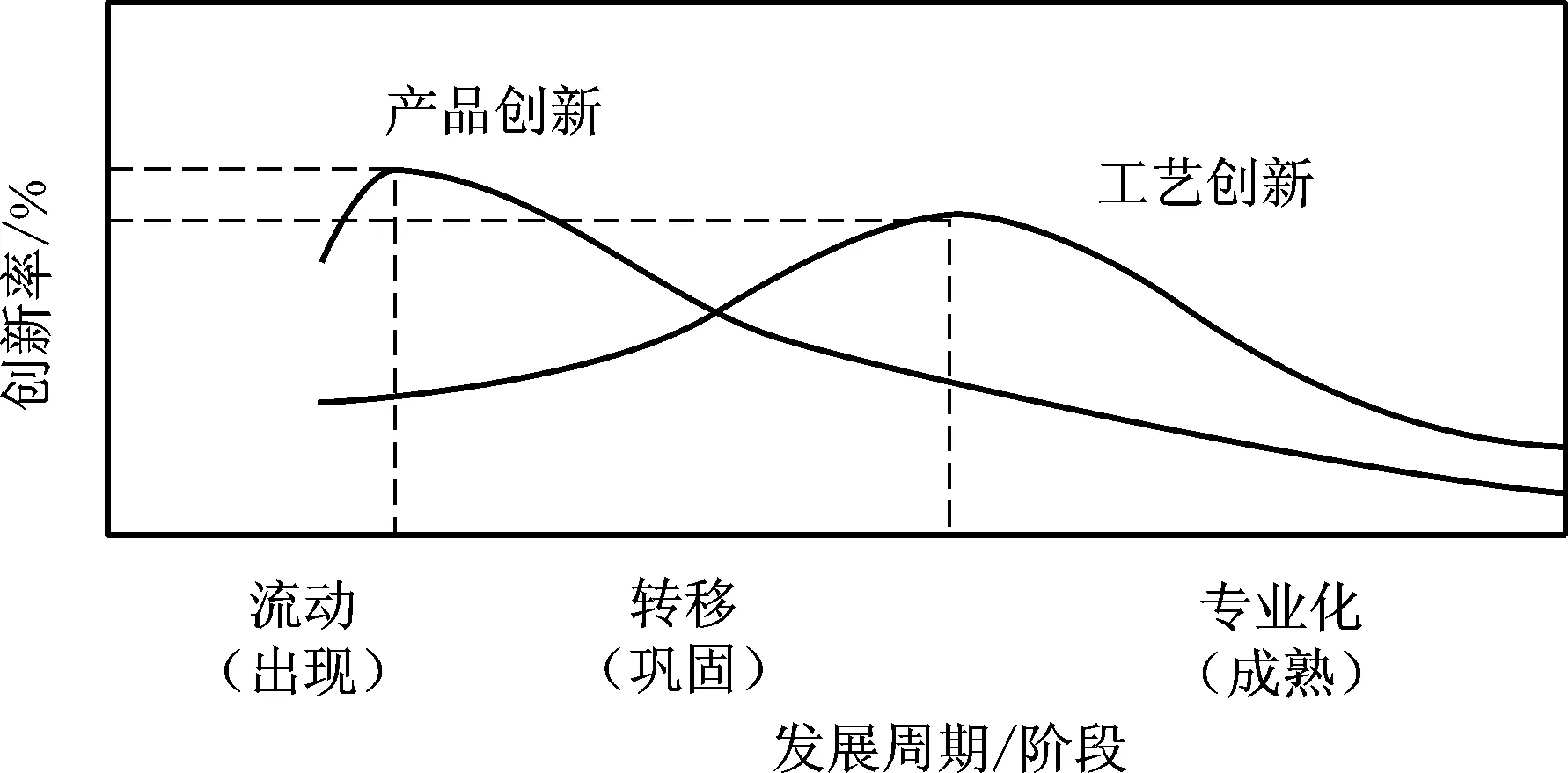
流动(出现)阶段是指行业发展初期,技术停留在比较低端的阶段,市场并未打开,产品功能需要不断的探索与完善;同时,又因为消费者对新产品并不了解,消费者对众多新产品的选择会一直处于变化之中,此时企业技术创新主要在于产品创新。在这一阶段,市场上有众多企业存在,各自市场地位并不稳定。在企业改良产品的过程中,随着技术的革新和消费者选择趋于稳定,主导设计即赢得市场的设计出现,产品创新率到达最高点,并成为主流方向,随后产品创新不再成为焦点,生产者逐渐将创新聚焦到工艺层面,从而进入转移(巩固)阶段。
在转移阶段,生产者加大投入在产品的生产工艺,希望能以低成本获得市场竞争优势,直至到达工艺创新率最高点,行业的发展进入成熟阶段。
在专业化(成熟)阶段,市场相对稳定,成本、数量和生产技术都得到均衡的重视,创新活动包含着渐进性产品创新以及工艺创新。此时,不能胜任的小企业陆续退出市场,市场被存留下来的少数的几家大企业占据,行业集中度提高。
A-U模型的学术贡献在于率先将产品和工艺进行结合,提出了技术生命周期模式。通过这个模型可以清楚地把握产品生命周期中不同阶段的技术创新特点,了解在不同阶段创新所处的环境以及面临的困境,这对于技术管理者在产业发展的不同阶段中制定恰当的政策与发展战略有很重要的启迪。
2. A-U模型研究进展
在随后的研究中很多学者对A-U模型进行了改进和拓展。一类研究致力于在理论上修正A-U模型,研究者认为A-U模型是有缺陷的,基础模型更适用于描述短期内的产业创新过程,有必要从产业演变的长期过程来分析技术创新与产业发展的关系,从而建立长周期形式下的A-U模型[3]。也有研究者认为要考虑技术断裂与网络化效应[4],并且还有跳跃式产业升级的现实存在[5],都应当纳入A-U模型的解释范围。另有一类研究致力于用某产业技术创新模式拟合传统A-U模型,考察A-U模型对现实情境的解释力,聂昭[6]对湖北省电子信息产业进行案例研究,采用数值分析的方法归纳排除不确定因素,将电子信息产业与传统A-U模型进行拟合研究,指出湖北省电子信息产业发展历程中产品创新和工艺创新存在同步演化的规律;程源、杨湘玉[7]对微电子产业进行研究分析,指出集成电路行业由于产品更新速度很快,各代产品之间始终存在激烈的竞争,所以不会有任何一家企业能够自始至终保持市场领导地位,因而产品创新和工艺创新呈现出同步演化的规律,1994年,Utterback在其研究中进一步证实了“集成电路产业是惟一无法用A-U模型来解释的例子”。学者们的研究对A-U模型运用于当代做出了有益的尝试,努力解释历史观照下的宏观视域的大跨度的产业技术创新,或者中观视域下的区域产业创新路径。但是,几乎没有研究涉及同样的产业创新在不同国家、不同区域的不同经历,事实上这种不同的过程一直在发生,对A-U模型存在着另一种挑战。
3. 理论创新与管理启迪
通过观察发现,不同国家的同一个产业,在产业创新的道路上有不同的表现,因此,引入国家技术特征这个要素,选取机器人产业这个典型的战略性新兴产业,通过将美国、日本和中国机器人产业发展过程拟合传统A-U模型,指出美、日、中3个国家的产业发展模式的差异,用案例推断构建符合我国战略性新兴产业的改进的A-U模型,以期从一个新的视角来透析A-U模型。
依据本文提出的改进的A-U模型,有利于我国政策管理者和企业把握战略性新兴产业的技术创新规律,提醒管理者和企业不能盲目乐观,要警惕技术进步之后隐藏的各种危险和不足,进而为管理者在产业发展的不同阶段制定相应策略提供依据。
二、 案例分析
1. 美国工业机器人产业发展及创新模式
1954年,美国人乔治·德沃尔设计并制造出了世界上第一台可编程的机器人,并注册了专利。这是最早期的机械手,它标志着机器人时代的到来。厄特巴克对美国众多行业包括机器人行业进行了实证研究表明,美国机器人产业符合A-U模型。
在机器人行业发展进程中,创新的形态依次经历了流动阶段、过渡阶段和稳定阶段;产业主导设计的出现与生产者数量峰值之间的假设关系(即主导设计出现之前生产者数量呈上升趋势,直至顶峰,主导设计出现之后产品企业数量迅速减少)也是成立的。 20世纪70年代,美国政府和企业界在技术路线上把重点放在研究机器人软件及军事、宇宙、海洋和核工程等特殊领域的高级机器人的开发上,因为当时大家都想象着这个产业的前景非常好,有两百多家公司开始做机器人(很像现在的中国) 。1978年,美国通用工业机器人PUMA问世,这意味着世界工业机器人技术已经完全成熟,竞争者的数量开始逐渐减少,只有那些实力雄厚、技术过硬的企业能够立于不败之地。
2. 日本工业机器人产业发展及创新模式
20世纪60年代末,日本的经济空前繁荣,年均增长率甚至达到11%,快速发展的经济使得日本陷入了劳动力严重不足的困境。1967年,日本川崎重工从美国引进了机器人及部分技术,第二年该公司便研制出第一台完全由日本生产的“Unimate”机器人。如果说20世纪60年代是日本机器人产业的摇篮期,那么经过十几年之后的20世纪70年代,日本便进入了实用期。然后,经过一系列的消化、吸收和再创新的过程,日本工业机器人到20世纪80年代很快进人普及提高期。1970年,日本工业机器人产量为1 350台,1975年,日本安装的机器人已有4 400台,到1987年,已增至45 100台,1980年,是日本机器人的普及元年,日本的各个领域都已经开始广泛使用机器人。随着日本工业机器人产业技术不断进步与市场成熟的过程中,市场集中度逐步提升,机器人企业数量逐渐减少,1980年,工业机器人制造企业282家,到2007年,则减少至108家。日本企业巨头发那科、安川等占据了大多国内及国外的市场份额。
在机器人行业,虽然日本起步比美国要晚,但后来居上,仅仅用了十几年便超越美国成为了“机器人王国”,不管是其机器人的生产量,还是本国工业企业安装的台数均在国际上位居第一。日本机器人技术之所以获得这样迅猛的发展,除了政府对机器人产业的高度重视之外,还有一个特别重要的原因,那就是日本重视国际间的合作,擅长引进新技术进而推出自己的新产品。日本许多公司采用引进国外先进技术,与国外合作或者合资来推动本国机器人技术发展。
3. 中国工业机器人产业发展及创新模式
中国工业机器人研究起步于20世纪70年代,但由于种种原因如基础条件薄弱、市场应用不足和关键技术欠缺等,未能形成自己的产品。20世纪80年代中期,国家启动多个关于机器人的科技攻关项目,推动了中国工业机器人研究形成了第一次高潮。经过5年攻关,完成了示教再现式工业机器人成套技术的研发,并在生产中经过实际应用考核,其性能指标达到国外先进国家20世纪80年代初的水平,能够进行小批量生产。20世纪90年代中期,我国在机器人技术领域的研发上将重点放在了焊接机器人的应用上,随后相继掌握了焊接机器人工程配套成套、现场运行和关键设备制造等技术。
2013年,中国购买的机器人数量占据世界上机器人数量的1/5,因此取代日本而成为世界最大机器人市场。虽然中国日前已经晋升为全球第一大机器人市场,但是由于起步较晚和技术限制,其自动化装备技术、重大成套装备系统集成与开发、高性能工艺装备自主设计和制造、高性能基础功能部件批量生产与应用等方面同发达国家相比,仍然有很大的差距。
4. 改进A-U模型的提出
为方便对美国、日本和中国的机器人产业发展进行阶段性的对比,现将各个国家的历程整理成表1,纵向观察主要的时间节点、重大技术创新、产业规模变化、机器人应用领域转移,进而把握每个国家的技术创新模式;横向对比各个阶段不同国家的技术创新活动,找出技术创新程度的差距。
将日本、中国与美国的机器人产业进行比较,可以看出,美国、日本和中国机器人产业的发展模式并不相同,美国通常能够利用自己的领先技术占据市场先机,在后续产品研发和工艺改进中也能够凭借丰厚的技术积累获得优势。而日本则是以“技术跟随”策略为契机,实现了“技术上的弯道超越”,通过引进、消化吸收,实现了工艺创新到重大产品创新,稳坐“机器人王国”宝座。而我国机器人企业由于长期扮演者追赶着的角色,基础研发能力不足,又缺乏对未来前瞻性技术的把握,从表中可以看出,日本在20世纪80年代就已经实现工业机器人产业化,而我国可以说落后了30年,产业化程度还不及日本20世纪80年代的程度高,因此无法真正扭转从“技术跟随”到“技术领先”的尴尬局面。
表1
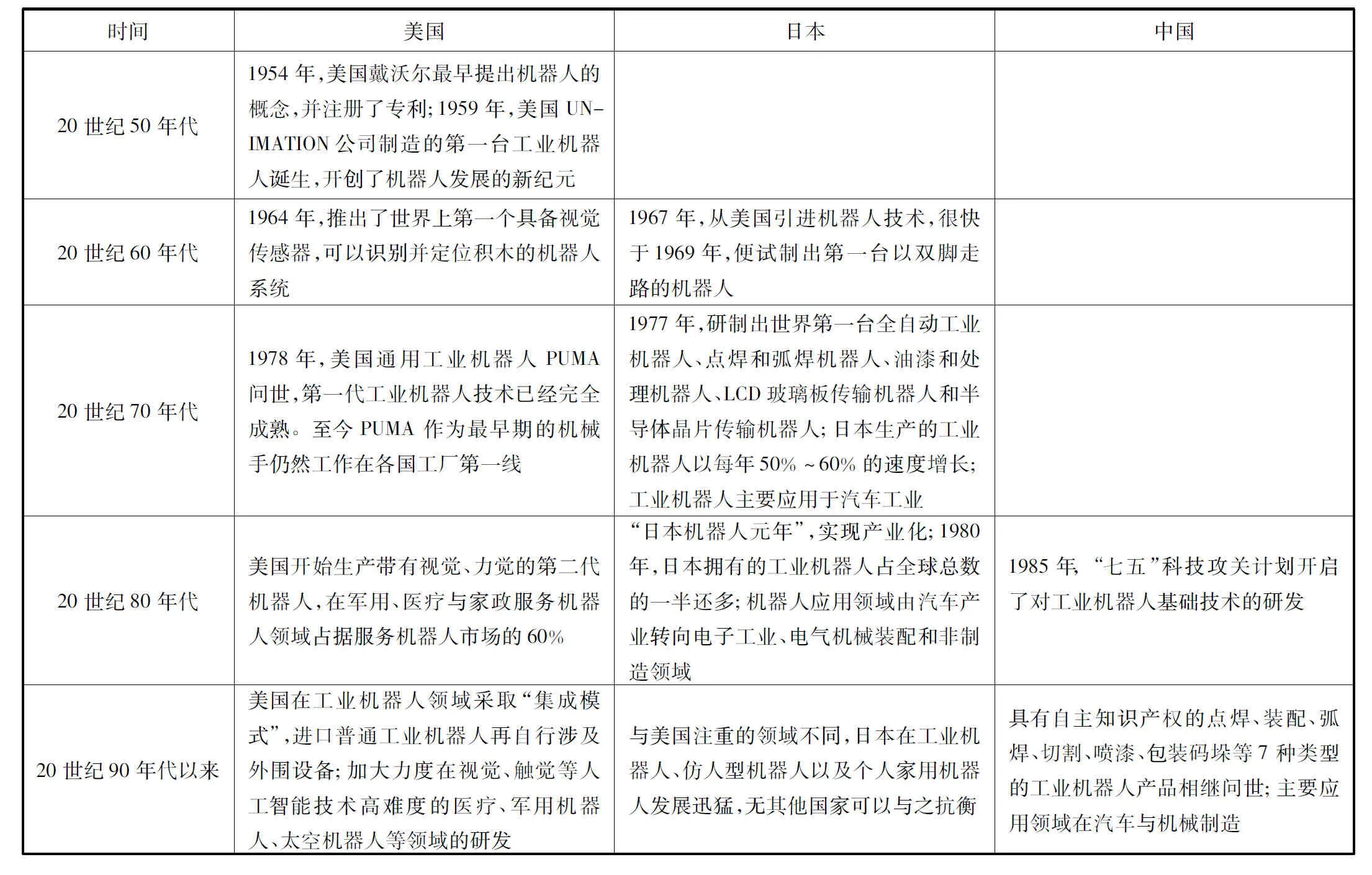
美国、日本、中国的机器人产业发展比较
以上所述可以得出,不同国家的产业演变呈现出不同的发展规律。A-U模型代表了一种发达国家以领先技术创新为推动的产业演化创新规律。但是对于日本和中国这样的后发国家而言,某些产业的发展必须先采取“技术跟随”策略,从技术引进到消化吸收,再到具备一定技术能力后进行产品创新。因此,后发国家产业发展呈现出与传统A-U模型反向的规律(见图2)。

三、 我国战略性新兴产业的发展路径
根据最新统计报告,2013年,中国购买的机器人数量占据世界机器人数量的1/5,取代日本成为世界最大机器人市场。
我国机器人产业只是战略性新兴产业的一个典型,一个缩影,在我们取得一系列成绩的同时,我们必须承认在成绩的背后还存在着诸多的困难与问题,例如我国成为世界第一机器人市场,由此看到了国内巨大的市场需求,同时也必须警醒我国机器人产业目前基本上已被跨国公司牢牢掌控,我国仍然面临着核心技术欠缺、自主品牌薄弱和低端产能过剩等亟待解决的问题。在工业科技技术迅猛发展与革新的今天,各国政策制定者都在寻找能够抢占经济发展先机的技术发展模式。而发展战略性新兴产业是决定着我国能否在第三次工业革命中抓住发展机遇、抢占经济和科技发展制高点、不被发达国家甩在后面的关键。
1. 实施反求工程,由工艺创新到产品创新
改进的A-U模型表明,发展中国家由于未能站在技术前沿,在后续发展中必然难以掌握产业的领先技术。同时发达国家的领先技术早已趋于成熟,有一定的壁垒保护,发展中国家很难实现技术突破。因此对于追赶型的发展中国家,企业在一开始应采取“技术跟随”策略,在工艺层面进行不断的消化吸收和改进,当技术积累到了一定阶段,便有了丰富的经验和深入的认识才能进行自主的产品创新。也就是要学会进行反求工程同时注重基础技术研发,先做好“中低端”市场,才有可能走向高端市场。
2. 细分市场,加强产业链协同发展
有市场就会有细分,绝不可能存在一家独大的情况。战略性新兴产业都是技术密集型产业,技术密集型就意味着每个行业都是十分细化的,然而,很多企业却追求大而全,这是对自身的盲目定位,对于单个企业和整个行业的发展都是不利的。因此,任何企业在发展中都要有清晰的自我定位,明确自己的细分市场,在小范围内做好技术与产品,再逐步扩大自己的应用领域。龙头企业则完全可以尝试与中小企业合作,这样的好处是不仅可以带动小企业的成长,也能够使产业链上下游更加匹配与协同。据悉,三星和LG两家公司都曾经尝试过这种做法,并取得了很好的成效。
3. 政府做好投资者和引导者的角色
日本政府针对本国的新兴产业制定过很多富有成效的产业政策,这些政策对于行业发展无疑有着重大的推动作用。对于我国来说,战略性新兴产业市场还很稚嫩,市场主体还很弱小,需要政府的扶持才能站稳根基,需要产业政策的庇护和促进才有可能成长为我国经济的支柱性产业。政府应该做好投资者的角色,持续进行研发投入,重点放在自主创新上,只有掌握产业发展中的核心技术和关键技术,才能实现技术跨越,在技术浪潮中缩短与先进国家的技术差距。其次,做好市场引导者的角色,引导的政策可以是政府采购、政府补贴等,同时,在进行政府决策时,要能够给予厂商、投资者以及消费者关于市场未来发展的持续、稳定的预期,引导市场健康稳步发展。
参考文献:
[1]Utterback J M,Abernathy N.A dynamics model of process and product innovation[J].TheInternationalJournalofManagementScience,1975(6):639-656.
[2]Utterback J M.MasteringtheDynamicsofInnovation[M].Cambridge:Harvard Business School Press,1994.
[3]王斌义. 基于A-U模型的物联网产业跨越式发展研究[J].科技进步与对策,2010(24):79-82.
[4]谢伟.A-U模型及其对技术学习研究的启示[J].科研管理,2000(6):24-31.
[5]刘友金,黄鲁成.技术创新与产业的跨越式发展:A-U型的改进及其应用[J].中国软科学,2001(2):38-42;47.
[6]聂昭,吕力.湖北省电子信息产业成长创新模式与A-U模型拟合度研究[J].商业经济,2010(16):48-50.
[7]程源,杨湘玉.微电子产业演化创新模式的分布规律:改进的A-U模型[J].科研管理,2003(3):19-24.
Development Path Study of Strategic Emerging Industry from the Perspective of Improved A-U Model—Take the of Robot Industry as an Example
Zhang Huiying1, Wang Liping1, Zhang Yingchun2, Chen Genlai3
(1.College of Management and Economics, Tianjin University, Tianjin 300072, China; 2.The Philosophy Department of Party School of Tianjin Committee, Tianjin 300192,China; 3.Alliance of Social Sciences in Tianjin,Tianjin 300051,China)
Abstract:Robot industry is a typical strategic emerging industry, by the case study, challenges and opportunities were revealed to meet the “Made in China 2025”. From traditional technological innovation dynamic model (A-U model), a comparative study was made on the industrial robot in United States, Japan, and China. The results show that the robot industry evolution in China was in contrast to the traditional A-U model, based on that, the improved A-U model is established. For the improved A-U model and the trouble of emerging the industry development in our country, the developing path of strategic emerging industries was put forward.
Keywords:robot industry; A-U model; development path
中图分类号:F271
文献标志码:A
文章编号:1008-4339(2016)01-006-05
通讯作者:张颖春,zych710216@163.com.
作者简介:张慧颖(1967—),女,教授.
基金项目:天津市科技发展战略专项基金资助项目(13ZLZLF01200).
收稿日期:2015-06-13.
