管道机器人非接触式自动纠偏方法
2016-04-15陈月玲赵吉宾齐智峰夏仁波
陈月玲,赵吉宾,齐智峰,夏仁波
(中国科学院 沈阳自动化研究所, 沈阳 110016)
管道机器人非接触式自动纠偏方法
陈月玲,赵吉宾,齐智峰,夏仁波
(中国科学院 沈阳自动化研究所, 沈阳110016)
摘要:针对等宽方形管道中车式机器人高精度直线行走的需求,构建了由一台CCD相机以及两个线结构光传感器组成的视觉测量装置。提出一种利用非接触式三维测量计算车体偏离管道中心线距离和角度的方法,将车体姿态在线反馈,利用控制算法消除位姿偏差,使车体中心线与管道中心线保持高度重合性。实验结果表明该方法克服了现有方法无法在缺乏道路信息的管道中直线行走的缺陷,具有较强的鲁棒性和检测精度,在远距离行走中偏移距离精度小于±5mm,同时,该方法已经被应用于光传输管道的在线清理系统中。
关键词:管道;视觉系统;三维测量;纠偏
0引言
在高功率激光装置中,存在大量的光学元件。当装置建造和高通量运行过程中,随着运行时间和激光能量的增加,光管道内部气溶胶含量迅速上升,由于微粒自由扩散,大量的尘埃堆积在光学元件表面,光学表面的污染物会引起光学表面发生损伤,因此对运行环境中光传输管道进行洁净处理是降低光学元件污染和损伤的必要手段。然而光传输管道一旦安装完毕就很难将其拆卸进行离线清洗,因而有必要研制一种光传输管道在线清洁系统,来降低光学元件污染和损伤[1]。
针对较窄的方式等宽管道,采用车式机器人携带在线清理装置进入光传输管道进行清理工作[2-3],然而机器人在进入管道以及行走过程中不可避免地存在跑偏现象,导致光传输管道以及车体携带零部件受损,为了避免车体与管道内壁发生不必要的碰撞,将车体中心线与管道中心线保持高度重合性尤为重要。国内外许多学者对其进行了研究,提出了许多有效方法,大量方法[4-6]普遍依靠视频探测确定周围环境以及对道路进行识别,并将获取的信息发送到各子单元自动控制车体直线行走,然而无法满足在无道路信息的光传输管道中高精度直线行走的需求。高森等人[7]利用空间映射的背景补偿法进行跟踪任务,该方法主要应用于前景和背景相差较大的情况,对于没有道路信息的光传输通道图像检测无法实施。Li等人[8]利用仿生鳄清洁管道中的沉积物,在运动的过程中,通过各驱动电机的相互配合控制,将动力通过直齿锥齿轮传动机构使各关节的转角发生变化,从而改变机器鳄的运动姿态,然而该方法的开关机制由齿状边缘构成,对管道容易造成二次损坏。
本文构建了一个光传输管道在线清洁系统,提出一种在缺乏道路信息的光传输管道中车式机器人进行非接触、高精度纠偏方法,设计视觉传感器装置,通过三维测量得到车体偏离管道中心线的偏差信息,对管道机器小车进行动力学分析,不断消除位姿偏差,将车体中心纠正到管道中心线上。实验结果显示该方法克服了现有方法无法在缺乏道路信息的等宽管道中直线行走的缺陷,具有纠偏精度高、成本低、有效避免车体携带部件与光传输管道发生不必要接触等优点。
1光传输管道在线清洁系统
为了实现机器人在管道内高精度直线行走,选择了移动方式驱动与转向机构独立,结构简单,应用成熟且更有利于保证移动机器人在管道内沿管道中心线行走精度的车式移动机器人[9]。
1.1在线清洁系统
由于激光具有强度高、能量密度大、聚焦性强、方向性好的特点,当激光与物质相互作用时,能够达到清除物体表面污染物的目的,因此车式机器人搭载激光清洗部件对光传输管道内部进行在线清理。光传输管道在线清理系统由车式管道机器人以及外置部件(包括控制软件、电源、制冷、显示器、吸尘等部件)组成,其中车式机器人上装载有在线洁净处理执行部件、视觉传感器系统、监控摄像头以及吸尘头部件。洁净处理执行部件对光传输管道内壁进行精细清洗,红外监控摄像头对管道内清洗状况进行监视,吸尘头部件对残留在管道壁的颗粒物进行清理,视觉传感器装置对车体位置进行在线测量,实时纠偏,保证车体高精度直线行走。
1.2视觉传感器测量系统
视觉传感器装置如图1所示,主要由一台CCD相机、两个线结构光传感器和图像处理单元等部分组成。
具体工作过程为:车式机器人进入管道区域,触发测量系统开始测量,线结构光传感器在管道壁投射出光条以构造测量特征,CCD相机采集被测图像,待采集完成后,图像处理单元对采集图像中的光条成像点坐标求取空间三维坐标,从而解算出车体偏移管道中心线的位置。

图1 车式机器人在线清洁系统以及视觉传感器装置放大图
2基于视觉传感装置的管道机器人纠偏方法
针对等宽方形管道中车式机器人高精度直线行走的需求,构建了由一台CCD相机以及两个线结构光传感器组成的视觉测量系统,提出一种管道机器人非接触式纠偏方法,如图2所示。

图2 管道机器人纠偏流程图
2.1视觉传感器标定
首先标定摄像机内参数,通过建立柔性靶标,令其中一个靶标作为基准柔性立体靶标坐标系,以子靶标之间位置关系不变为约束条件,将各子靶标特征点的局部坐标统一到柔性立体靶标坐标系下,建立以重投影误差为最小的目标函数,采用非线性优化方法得到摄像机参数的最优解[10];然后利用得到的摄像机内参数分别标定两个线结构光平面,多次移动共面靶标计算不同方向激光条纹直线的消隐点,并对其拟合直线得到光平面的消隐线,完成光平面法向的标定。根据交比不变原理计算共面靶标上标定点间的距离,并以其为约束来标定剩余参数。最后定义了优化目标函数,以已求得参数为初值进行非线性优化,得到结构光平面参数[11]。
2.2结构光光条定位
当车体进入管道后,利用相机进行图像采集以及数字化存储,对采集的图像进行高斯平滑处理,减少图像噪声。其中,采用大小为3×3的高斯滤波器模板,高斯内核在X方向的标准偏差为1.2,高斯内核在Y方向的标准偏差为0.5。然后使用最大类间方差OSTU[12]方法进行全局自适应阈值分割,使得前景和背景类间方差最大,确定最优的灰度分割阈值,提取感兴趣的前景光条纹区域。为了避免光传输管道中存在光照以及管道表面反光性较强等干扰,对阈值分割后的图像进行开运算,同时提取图像中的轮廓,去除轮廓区域面积较大和较小的区域,如图3所示,实验中给定的阈值为Tmax=2400,Tmin=50。

图3 结构光光条检测
利用灰度重心法检测光条纹中心,将检测到的光条纹中心点去畸变,并转换到图像的物理坐标系下,最后通过标定好的两组光平面参数将其分别转换到相机坐标系下,分别对两组三维坐标值取平均,得到两个稳定的光斑三维点。
2.3视觉导航控制算法
2.3.1计算小车偏移角度和偏移量
首先,利用2.2节得到的两个稳定光斑三维点坐标值计算在相机坐标系下偏移角度和偏移量(两个结构光传感器放置在车体上保持高度一致,因此在相机坐标系下三维点的y值可以忽略不计):
(1)
(2)
其中,θ是小车在相机坐标系下的偏转角度,P1x,P1z分别是图像中右侧光斑点x和z坐标值,P2x,P2z分别是图像中左侧光斑点x和z坐标值,d是相机坐标系下车体偏移量,L是车体在管道中心线基准位置处相机光心离管道壁的距离。
为了计算车体处于管道中心线基准位置处相机光心离管道壁的距离,已知管道口径宽度为W,将车体放置在管道的中心位置处,利用相机采集图像,检测光条上点在相机坐标系下的三维点坐标,本文采用W=500mm的管径,得到光心点离管道壁的距离(L=103)。因此相机光心点距离车体中轴的垂直距离为N=W/2-L=250-103=147。
实验中以车体前端的舵机中心点为转动控制点,因此需要将上述计算得到的偏移角度和偏移量转换到舵机的中心点位置处,转换关系如下:
θ2=θ1
(3)
d2=d+M·sinθ2+N·(cosθ2-1)
(4)
其中,θ2是以舵机中心点为参考点的车体偏移角度,d2是以舵机中心点为参考点的偏移量,M表示相机光心点距舵机中心点的纵向距离,由机械加工图可知M=130mm。
2.3.2控制算法
通过视觉系统获得当前时刻(记为i)车体的偏差信息为di,θi,通过驱动电机的反馈信息及内存的存储信息获得此时的速度信息与舵角信息μi,φi,然后将以上信息作为纠偏控制的输入量,经过纠偏控制算法分析后,得出为消除该时刻的偏差,需要舵机在下一时刻转过的角度信息,即下一时刻的目标舵角大小φi+1,最后利用公式(5)计算舵角大小对应的脉冲宽度,控制舵机以实现一次控制流程。
pwi=(((90-φi)/180)×2+0.5)×1000+50
(5)
其中,pwi是舵角大小对应的脉冲宽度,φi是舵角大小。
通过在线反馈,实时控制,使得车体在有限时间内偏移信息θ→0,d→0,实现了车体中心线和管道中心线保持高度重合的目的。
3测量系统精度验证
为验证本文提出方法的有效性和正确性,采用AVT公司的Manta系列相机(分辨率:2048×1088)和两个COHERENT公司的中心波长为630nm的一字线激光器构成一个视觉传感器系统。同时,为了保证车体在偏移时,光条仍在视野内,相机配置了Computar公司的6mm精工镜头,相机视野较大。本实验使用的管道内径为500mm×500mm,长6m,带吸尘头的车式机器人的宽度为400mm。所有的仿真实验均在Windows 7操作系统下采用Visual Studio 2008软件实现。
3.1视觉传感器标定
采用100mm×80mm规格的圆形标定板对视觉传感器进行标定,首先对相机进行标定,得到相机内参数矩阵Kc和畸变系数矩阵kc:
KC=

该结果的重投影误差均值为0.134个像素,具有较高标定精度。
两个结构光平面在相机坐标系下的光平面参数分别为:
-622.066171x-20.452303y+1.000000z+16208.148402=1;
-168.837084x-11.259266y+1.000000z-4459.496430=1。
3.2视觉控制对于车体偏移量以及偏移角度的影响
图4显示视觉控制对于车体偏移量以及偏移角度的影响。横坐标表示时间Time(s),左侧纵坐标表示偏移量Displacement(mm),右侧纵坐标表示偏移角度Offset angle(°)。从图4可以看出,车体的偏移量以及偏移角度随时间收敛。

图4 视觉控制对车体偏移量以及偏移角度的影响
3.3车式机器人快速进入管道视觉纠偏控制
图5显示了小车进入6m的实验管道,当小车前进时,视觉控制纠偏示意图。横坐标表示时间Time(s),左侧纵坐标表示偏移量Displacement(mm),右侧纵坐标表示偏移角度Offset angle(°)。当车式机器人前进速度为0.06m/s时,由图5可见,利用视觉控制在线反馈,形成闭环系统,不断消除偏差,偏移量和偏移角度都趋于0,在行驶过程中,车体沿直线行走,行走精度高,偏移量精度为±1mm。
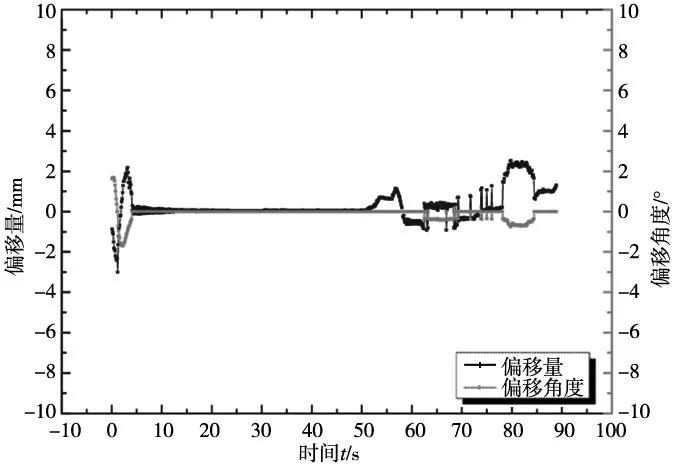
图5 车体快速进入6m的视觉纠偏控制
3.4车式机器人清理过程
下图显示了小车进入和退出2m的实验管道,当小车前进和后退时,视觉控制纠偏示意图。横坐标表示时间Time(s),左侧纵坐标表示偏移量Displacement(mm),右侧纵坐标表示偏移角度Offset angle(°)。小车前进速度为0.06m/s,由于小车在后退时要进行清理工作,因此后退速度为0.01m/s,且后退时每运行70mm小车停止,对管道进行一次激光清理。图6可以看出,小车最终达到平衡稳定状态,与小车进入管道的初始位置无关,偏移量和偏移角度都趋于0,实现了在线纠偏,纠偏精度高,避免车体携带部件与管道壁发生不必要的碰撞。

图6 车式机器人在管道清洗过程中视觉导航控制
4结论
本文提出了一种管道机器人非接触式自动纠偏方法。通过非线性优化算法标定视觉传感器装置,通过三角测量得到两个光条的三维坐标值,计算车体偏移量和偏移角度,并在线反馈,利用控制算法不断消除位姿偏差以达到车体与管道中心线保持高度重合性的目的。实验结果显示该方法克服了现有方法无法在缺乏道路信息的光传输管道中直线行走的缺陷,具有较高的鲁棒性和检测精度。
[参考文献]
[1] 赵龙彪,秦朗,周国瑞,等. 大口径高通量实验平台反射镜在线洁净控制技术[J]. 强激光与粒子束, 2013,25(18):3251-3219.
[2] 钟文胜, 陶学恒, 卢金石. 油烟管道清洗机器人关键技术研究[J]. 组合机床与自动化加工技术, 2013 (4): 122-124.
[3] 许冯平, 王锡名, 朱新忠. 一种蠕动式管道机器人行走机理研究[J]. 组合机床与自动化加工技术, 2009 (7): 34-37.
[4] BUZZONI M, BROGGI A, CARDARELLI E. VIAC expedition toward autonomous mobility[J]. IEEE Robotics and Autonomous Magazine, 2011, 18 (3): 120-124.
[5] THRUN S, MONTEMERLO M, DAHLKAMP H. Stanley: The Robot that won the DARPA Grand Challenge [J]. Journal of Field Robotics, 2006, 23 (9): 661-692.
[6] 袁亮. 基于 Harris-SIFT 的移动机器人视觉定位[J]. 组合机床与自动化加工技术, 2014(6): 19-24.
[7] Li Z, Zheng J, Lin X. Research on Biomimetic Robot-Crocodile Used for Cleaning Industrial Pipes[C]//Advanced Research on Computer Science and Information Engineering. Springer Berlin Heidelberg, 2011: 359-365.
[8] 高森, 丛明, 刘冬, 等. 一种基于距离加权的机器人运动目标跟踪方法[J]. 组合机床与自动化加工技术, 2014(12):65-69.
[9] 张瑞雷,李胜,陈庆伟.车式移动机器人动态编队控制方法[J]. 机器人,2013,35(6):651-656.
[10] 孙军华,刘震,张广军,等. 基于柔性立体靶标的摄像机标定[J].光学学报,2009,29(12): 3433-3439.
[11] 陈天飞, 赵吉宾, 吴翔. 基于共面靶标的线结构光传感器标定新方法[J]. 光学学报, 2014, 35(1):112004.
[12] H. Yan. Unified formulation of a class of image thresholding techniques [J]. Pattern Recognition, 1996, 29(12): 2025-2032.
(编辑李秀敏)
Non-Contact Automatic Correction Method of Pipeline Robot
CHEN Yue-ling, ZHAO Ji-bin, QI Zhi-feng, XIA Ren-bo
(Shenyang Institute of Automation, Chinese Academy of Sciences,Shenyang 110016, China)
Abstract:Concerning the need of walk straight for the car-like robot in equally wide pipeline, the vision measurement system is build with a CCD camera and two line structured-light sensors. A method based on non-contact three-dimensional(3D) measurement is proposed to compute the position and angular deviation of the car-like robot in pipeline, then feed back to the control system. By control algorithm, the position and angular deviation are eliminated, thus the high coincidence between the center line of the pipeline and car body is gained. The experimental results demonstrate that the proposed method overcomes the deficiencies of the existing methods that cannot walk straight in lack of pipeline information, with higher robust and detection accuracy of ±5mm. Meanwhile,it has been used in on-line cleaning system of optical transmission pipeline.
Key words:pipeline; vision system; 3D measurement; rectify
中图分类号:TH166;TG659
文献标识码:A
作者简介:陈月玲(1987—),女,山西大同人,中国科学院沈阳自动化研究所助理研究员,研究方向为机器人和计算机视觉,(E-mail)chenyueling@sia.cn。
收稿日期:2015-05-28
文章编号:1001-2265(2016)03-0016-04
DOI:10.13462/j.cnki.mmtamt.2016.03.005
