基于自抗扰控制器的重力稳定平台控制系统研究*
2016-04-15许江宁何泓洋郭士荦
郭 斌 许江宁 何泓洋 郭士荦
(海军工程大学导航工程系 武汉 430033)
基于自抗扰控制器的重力稳定平台控制系统研究*
郭斌许江宁何泓洋郭士荦
(海军工程大学导航工程系武汉430033)
摘要重力稳定平台系统是一类难以获得精确模型的复杂非线性不确定的运动系统,由于存在机械谐振、力矩耦合负载变化及电气参数波动等因素的影响,并且稳定平台系统要求具有响应速度快,抗干扰能力强,稳态精度高等优良特性。但这些性能指标之间是有矛盾的。针对这一问题,设计了基于重力稳定平台控制系统的自抗扰控制器,并进行了Simulink仿真。仿真结果表明,该系统具有很好的响应特性、自适应性和速度快,具有很高的稳态精度,而且系统对参数变化不敏感,鲁棒性和抗干扰性都很强。
关键词重力稳定平台; 性能指标; 抗干扰能力; 自抗扰控制器; 控制系统
Gravity Stabilized Platform Control System Based on Active Disturbance Rejection Controller
GUO BinXU JiangningHE HongyangGUO Shiluo
(Department of Navigation, Naval University of Engineering, Wuhan430033)
AbstractGravity stabilized platform is a kind of complex uncertain movement system which is difficult to get accurate models. It can be affected by mechanical resonance, torque coupling, load change and electrical parameters fluctuations, and requires quick response speed, strong anti-jamming capability, and high steady state accuracy. However, the influences and requirements are contradictory. Therefore, an active disturbance rejection controller based on gravity stabilized platform is designed. The Simulink simulation results show that the controller possesses good response speed, adaptivity , fast speed, high steady accuracy, strong robustness and anti-interference capability and isn’t sensitive to the parameter change.
Key Wordsgravity stabilized platform, performance index, anti-jamming capability, active disturbance rejection controller, control system
Class NumberTP273
1引言
迄今为止,重力稳定平台控制系统的设计,都是把实际系统看作线性系统,并采用线性经典控制技术进行设计。然而,随着航天、航空、航海及现代战争的发展,对稳定平台控制系统的性能指标的要求越来越高,不但要求稳定平台控制系统具有很高的稳态精度和很好的动态品质,而且还要具有足够大的适应范围和抗干扰能力。因此,有必要寻找新的设计方法,改进系统的性能。近年来,国内的学者提出了惯性平台稳定回路的变结构控制[1]及平台稳定回路的模糊PID控制[2],并取得了较好的数值仿真结果,但是它们都显得比较复杂。
重力稳定平台系统是典型的运动控制,其中机械谐振、力矩耦合负载变化及电气参数波动等因素决定了它是一类难以获得精确模型的复杂非线性不确定系统[3]。特别是系统大部分情况下工作在低速范围内,如何克服系统内部非线性因素(摩擦干扰、电机死区等)的影响和在一定范围内的外部载体扰动情况下,保证伺服稳定系统具有快速的动态响应和低速运动的平稳性,是控制系统设计的难点。
自抗扰控制器(Active Disturbance Rejection Controller,ADRC)是一种不依赖于系统模型的改进型非线性PID控制器,具有低超调、收敛速度快、精度高、抗干扰能力强及算法简单等特点,已在发电机励磁控制、高速精加工机床控制等领域和高性能武器系统控制中得到实际应用,比传统PID控制器更能有效抑制干扰,具有模糊控制优越的推理能力,并能在一定范围内对非精确模型进行最佳估计。
本文提出如何用自抗扰控制技术[4]进行重力稳定平台回路的伺服控制问题,建立稳定平台的数学模型,并设计基于自抗扰控制器的重力稳定平台控制系统的核心框架,详细介绍ADRC参数整定过程,在系统模型不够精确或者参数变化时,或者外部干扰未知的情况下,重力稳定平台仍具有较好的稳定精度和动态响应速度,并且具有很强的抗干扰性能[5]。
2重力稳定平台的数学模型
重力稳定平台[6]本质上是个力矩平衡系统,干扰力矩克服摩擦力矩和电机力矩引起转动,如图1所示。
稳定平台以干扰力矩M0为输入参数,以姿态角θ为输出参数进行建模。平台控制器采用自抗扰控制器,其输出控制电压为u,功率放大器放大倍数为Kw,摩擦力矩采用库仑-粘滞模型[7],列写平衡方程如表1所示。

图1 重力稳定平台力矩平衡控制框图
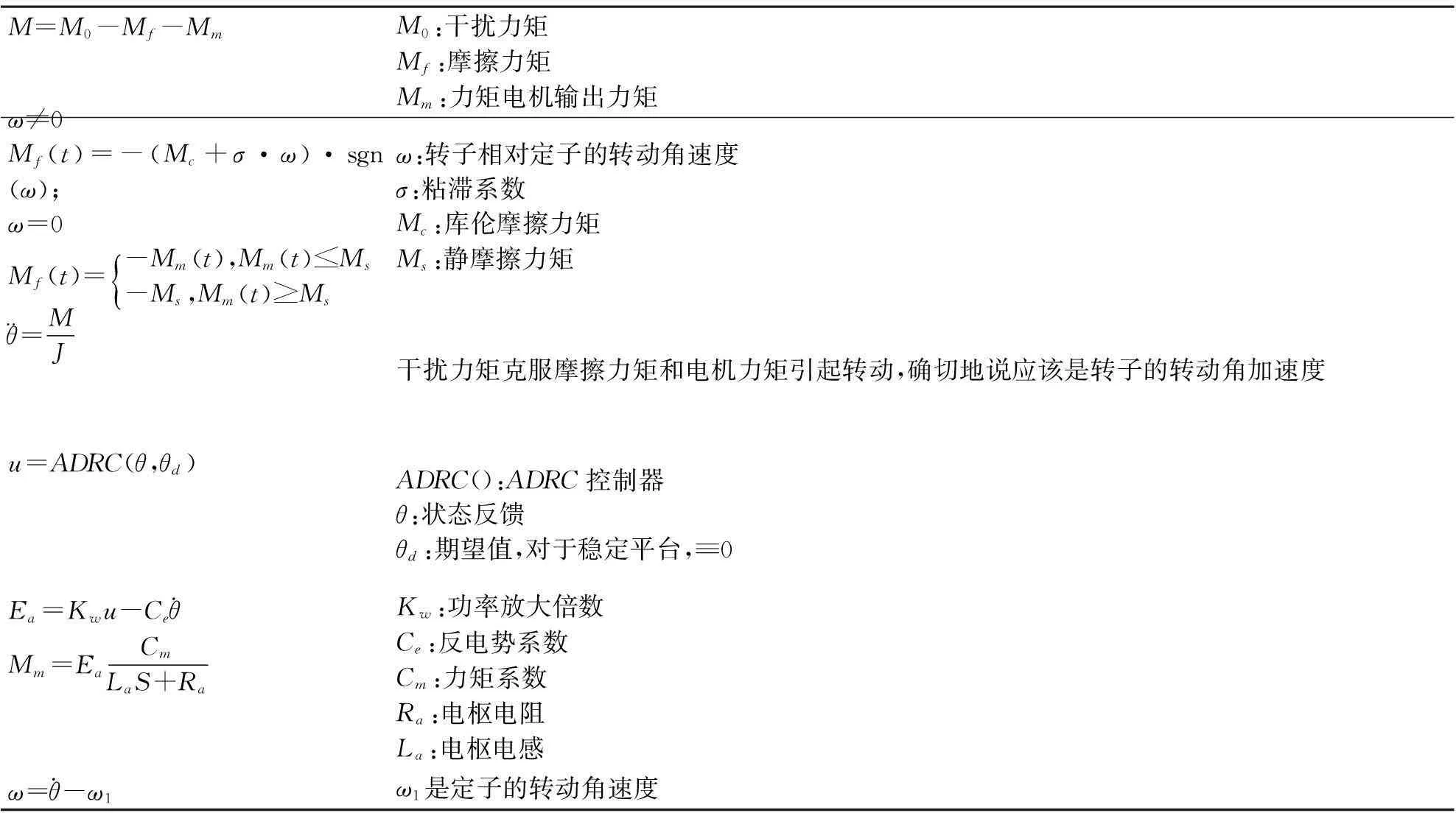
M=M0-Mf-MmM0:干扰力矩Mf:摩擦力矩Mm:力矩电机输出力矩ω≠0Mf(t)=-(Mc+σ·ω)·sgn(ω);ω=0Mf(t)=-Mm(t),Mm(t)⩽Ms-Ms,Mm(t)⩾Ms{ω:转子相对定子的转动角速度σ:粘滞系数Mc:库伦摩擦力矩Ms:静摩擦力矩¨θ=MJ干扰力矩克服摩擦力矩和电机力矩引起转动,确切地说应该是转子的转动角加速度u=ADRC(θ,θd)ADRC():ADRC控制器θ:状态反馈θd:期望值,对于稳定平台,≡0Ea=Kwu-CeèθMm=EaCmLaS+RaKw:功率放大倍数Ce:反电势系数Cm:力矩系数Ra:电枢电阻La:电枢电感ω=θ-ω1ω1是定子的转动角速度
将表中的方程式联立,用动态结构图表示,对应的系统控制框图如图2所示。
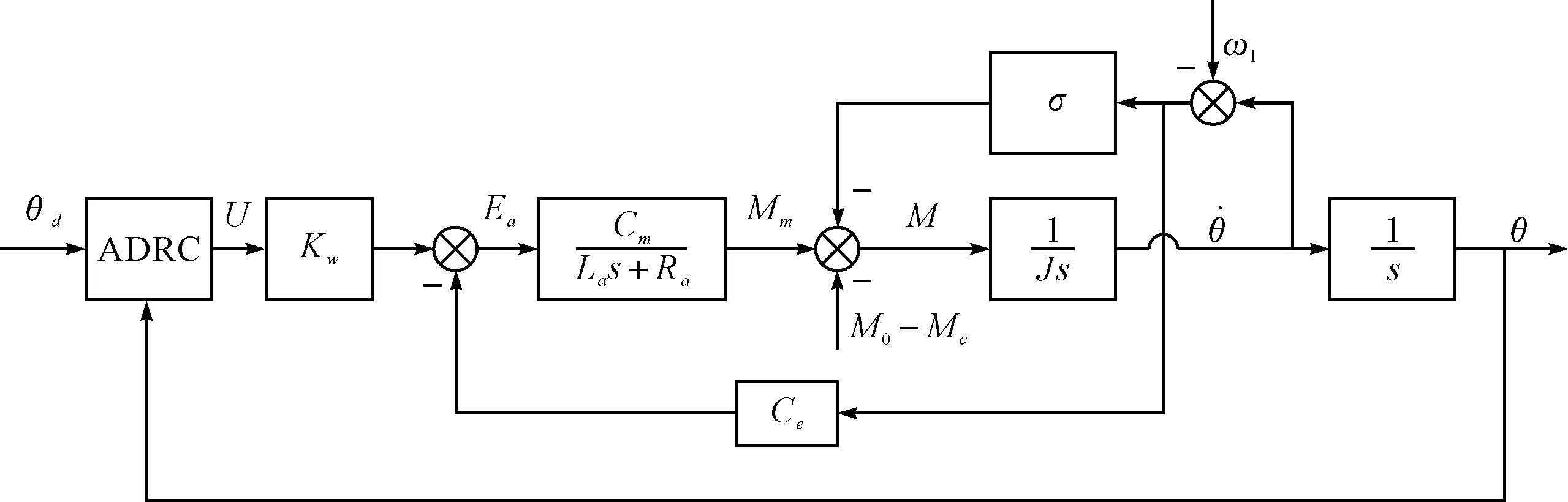
图2 基于ADRC控制的稳定平台控制系统框图
对于ADRC控制系统,首先需要建立被控对象的状态方程,以位置角作为观测的状态变量和输出量,输入为电机电压和未知干扰,电机和平台的状态方程如下
(1)

3自抗扰控制器
自抗扰控制器[4]是在反馈线性化的基础上设计的,由非线性跟踪微分器(TD)、扩张状态观测器(ESO)和非线性反馈控制律(NLSEF)三部分组成。其核心是把系统的未建模动态和未知外界扰动都归结为系统的“总扰动”而进行估计并给予补偿。跟踪微分器TD,其作用是安排过渡过程并给出此过程的微分信号;扩张状态观测器ESO,其作用是给由对象输出y估计对象的状态变量和对象总扰动的实时作用量(被控对象所有不确定模型和外扰作用的总和),这个实时估计值的补偿作用使被控对象化为“积分器串联型”;利用非线性状态误差反馈NLSEF对被化为“积分器串联型”的对象进行控制。图3为二阶ADRC的原理结构框图,图中虚线部分为自抗扰控制器(ADRC)。
4基于自抗扰控制器的重力稳定平台控制系统设计
基于自抗扰控制的重力仪稳定平台单轴控制系统结构框图如图4所示,整个控制系统是单闭环结构,在载体干扰作用下,使平台俯仰轴或者横滚轴相对惯性空间的偏差角趋近于零。
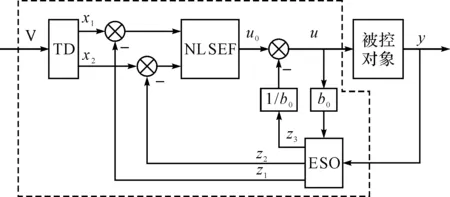
图3 二阶自抗扰控制器结构框图
根据稳定平台的输出和输入关系,自抗扰控制器采用二阶结构模型,由二阶跟踪微分器、三阶扩张状态观测器和误差反馈控制律组成。安排的过渡过程与对象状态估计量之间误差的适当非线性组合和未知扰动估计量的补偿来生成控制信号u。
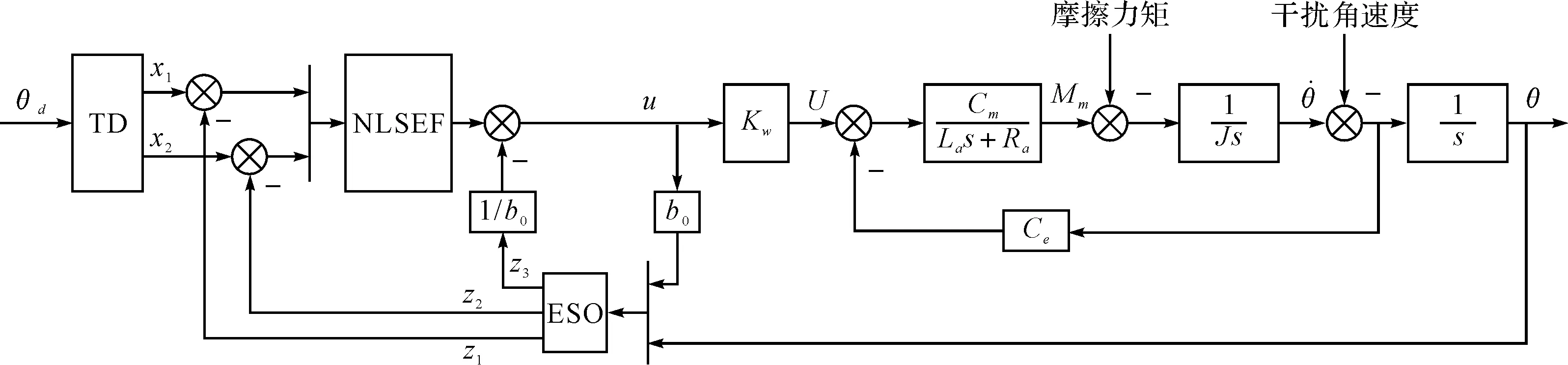
图4 基于ADRC的重力仪稳定平台单轴控制系统框图
4.1ADRC算法[7]
ADRC控制器在具体实现时,为了避免高频颤振,提高数字性能,通常采用如下离散化的控制器方程,以二阶自抗扰控制器的算法归结如下
1) 安排过渡过程(TD方程)
(2)
其中,函数fst()的定义为
d=rh,d0=dh
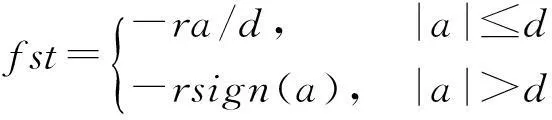
(3)
式中,x1和x2为状态变量,h是数值积分的步长,滤波因子h0、速度因子r是外部可调参数。
2) 估计状态和总扰动(ESO方程)
(4)
式中,β0i>0(i=1,2,3)。饱和函数fal(e,α,δ)的作用为抑制信号抖振,表示为
(5)

3) 误差反馈控制律(NLSEF方程)
(6)
式中,0<α01<1<α02,e1(k)为指令信号与被控对象位置输出之差,e2(k)为指令信号微分与被控对象速度输出之差。
该控制器之所以称为“自抗扰控制器(ADRC)”,就是因为ADRC把对象的“未知机理及未知干扰”都归结为对象的未知扰动,而由对象的输入、输出,对它进行估计并给予补偿,从而实现抗干扰功能。因此[8],ADRC并不强求对象的精确模型,只需要对象的输入输出数据θd、y和放大系数b0。
4.2自抗扰控制器参数整定
由ADRC算法中,y是对象的输出,u是控制量,ADRC是由以上三部分组成,其可调参数[9]为r,h0,β01,β02,β03,α1,α2,δ,b0,β1,β2,α01,α02,δ1,δ2。
虽然ADRC的可调参数很多,但是根据TD、ESO和非线性反馈控制(NLSEF)的各自功能,可以先独立地进行各部分的参数整定。根据经验赋初值及参数变化规律进行参数整定:
1) TD的参数r是跟踪微分器的速度因子,其值越大跟踪速度越快,h0是决定滤波效果的参数。r越大,跟踪信号越快,但噪声放大也越厉害;h0越大,滤波效果越好,但跟踪信号的相位也损失越大。因此r和h0需要协调调整。
2) 根据经验取值,α1=0.5,α2=0.25。在ESO中,δ是滤波因子,δ越大,滤波效果越好,通常取值范围5h≤δ≤10h。选择β01,β02,β03的原则为保证ESO的稳定。一般地,β01在一定范围内增大对系统控制品质并无较大影响,当β01增大较多时,容易引起发散振荡,当β01减小时,系统整体的跟踪效果变差,通常来说,β01的大小还与系统的采样时间h有关,β01与1/h大致处于同一数量级,即β01h=1;β02的增大会产生高频噪声信号,导致系统控制品质恶化,β02减小会使振荡次数增加,振荡幅度加大;当β03增大时,系统的跟踪速度加快,但容易引起振荡,当β03减小时,系统的跟踪速度减慢,过渡过程趋于平稳,不易引起振荡,但容易引起较大的相位滞后,甚至跟踪不上。b0比较大的话,β02和β03可以适当的取大些。
3) NLSEF参数的β1,β2相当于PD控制器的比例系数和微分增益,它们的整定也与PD控制器类似。通常,α01取为1.0、0.75、0.5,α02取1.25、1.0、0.5。δ1、δ2影响控制器的非线性性能,其值取得比较大时,ADRC可能只工作在线性区间,当其取值太小时,则容易产生颤振现象。
4) 其中b0是和系统唯一相关的参数,由表1根据系统参数计算而得,式(1)中b可为b0的参考值。参数b与被控对象有关,它代表了执行机构控制作用对系统动态特性影响的程度。实际上b不能精确已知,以b0代替b,要求b0在b附近的范围内变化,随着对象增益变大或时滞变大,可适当增大b0。大量仿真经验表明,b0的取值一般在0.01~10变化。
ADRC参数多,待初值确定后,其控制性能主要由几个参数决定,图5为待初值确定后ADRC控制器参数整定流程[9]。
5仿真结果
根据图2的结构框图,构建基于S函数的稳定平台ADRC控制仿真模型并进行仿真。

图5 待初值确定后ADRC参数整定流程
参考上节所述的ADRC控制参数整定的经验方法,经过仿真调试,2阶跟踪微分器(TD),非线性控制器(NLSEF)和3阶扩张状态观测器(ESO)的各主要仿真参数设置如下:
· TD:采样时间T=0.001s,h0=h=T,r=100;
· ESO:β01=1000,β02=3000,β03=2000,α1=0.5,α2=0.25,δ=0.05;
· NLSEF:β1=100,β2=200,α01=0.5,α02=0.25,δ1=δ2=0.05,b0=2.16。
5.1跟随性能分析
1) 稳定精度
控制系统的稳定精度是控制器性能的一项重要指标。给定位置输入为零,载体出现干扰时,横滚角Rf的稳态输出角度波形如图6所示。
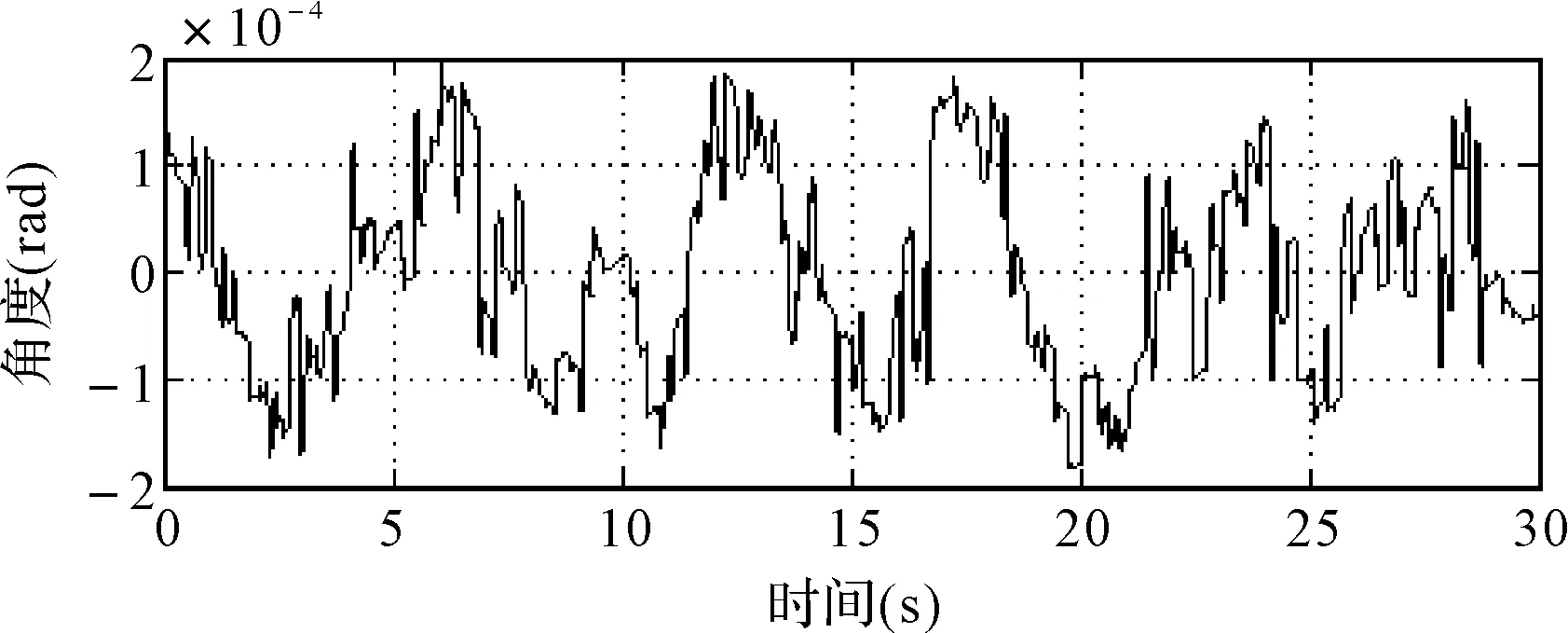
图6 稳定平台的稳定角度曲线
此时横滚角的最大跟踪误差约为0.2mrad≈0.69′,但是由于自抗扰算法本身存在一些非线性因子在里面,所以从稳定角度曲线可以看出稳定曲线振荡相对比较厉害,高频成分相对较多。
2) 阶跃输入信号的跟踪性能
在10s时,对稳定平台系统施加10rad的阶跃输入信号,系统的阶跃输出响应如图7所示。

图7 阶跃响应曲线
可以看出,对于阶跃输入信号,控制系统输出无超调,而且响应速度快,调节时间约2s。在ADRC控制器中,通过跟踪微分器(TD)的作用,有效解决了系统快速性与超调的矛盾。
3) 对干扰力矩的跟踪
伺服控制系统既是角度跟随系统,又是力矩平衡系统。对稳定平台直接施加正弦干扰转矩,电机输出转矩能够实时跟踪输入的干扰力矩,如图8所示。
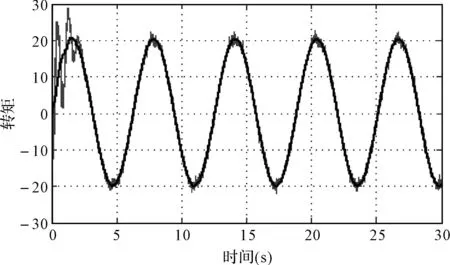
图8 正弦干扰转矩时电机的输出转矩波形(ADRC)
图9是系统采用传统PID控制算法时,电机输出力矩跟踪干扰力矩的波形。与图8进行对比可以看出,ADRC的跟踪精度更高。
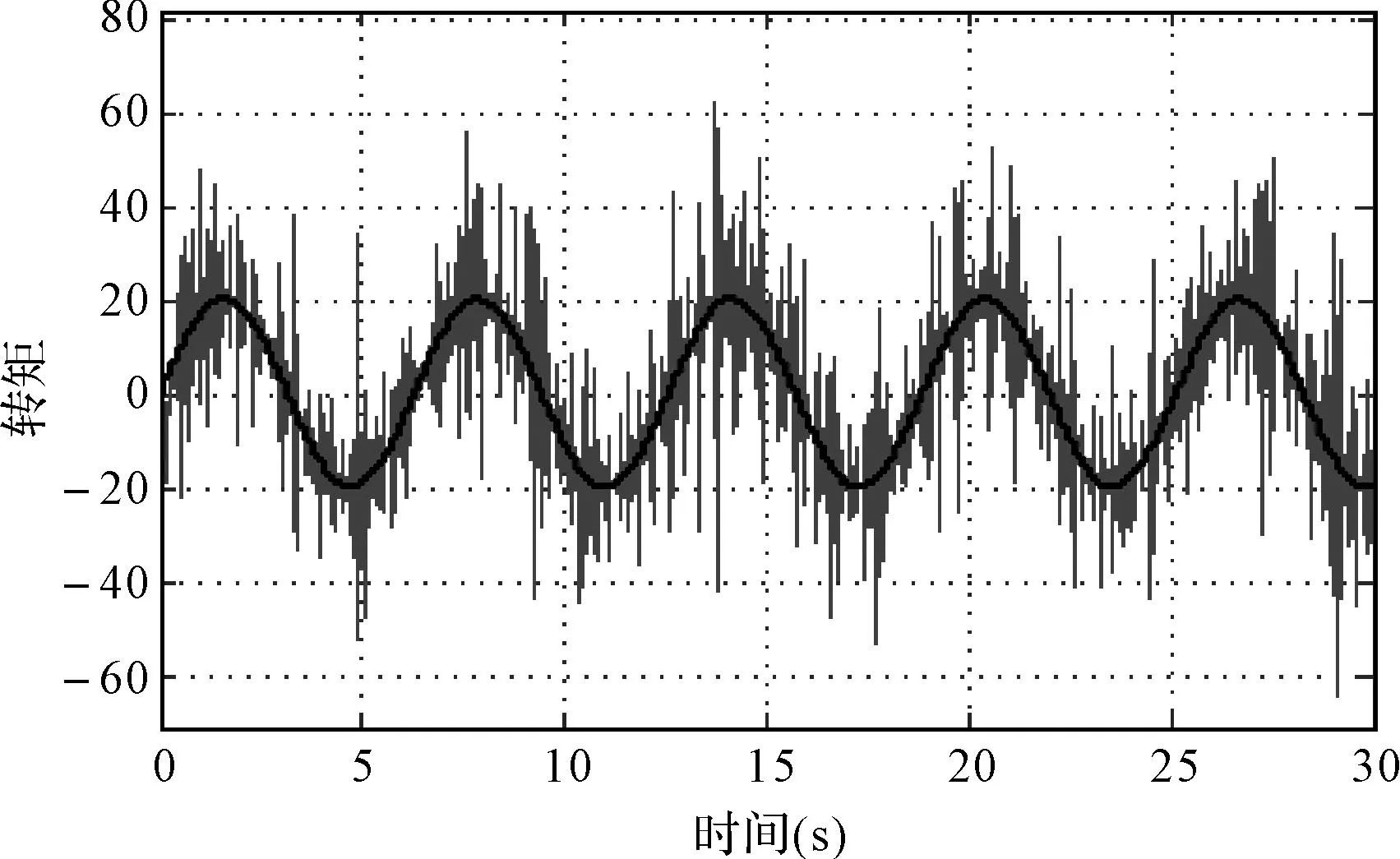
图9 正弦干扰转矩时电机的输出转矩波形(PID)
5.2抗干扰性能分析
当载体扰动正弦速度信号周期7秒,幅值为25°/s时,平台隔离扰动的响应如图10所示。
由图10可以看出,载体扰动速度幅值为25°时,稳定平台在惯性空间的偏差角度仅为0.01°(0.6角分),隔离效果[10]为0.04%,使稳定平台在惯性空间保持稳定。和经典PID控制方式相比,抑制载体扰动对重力仪的影响的效果更好。
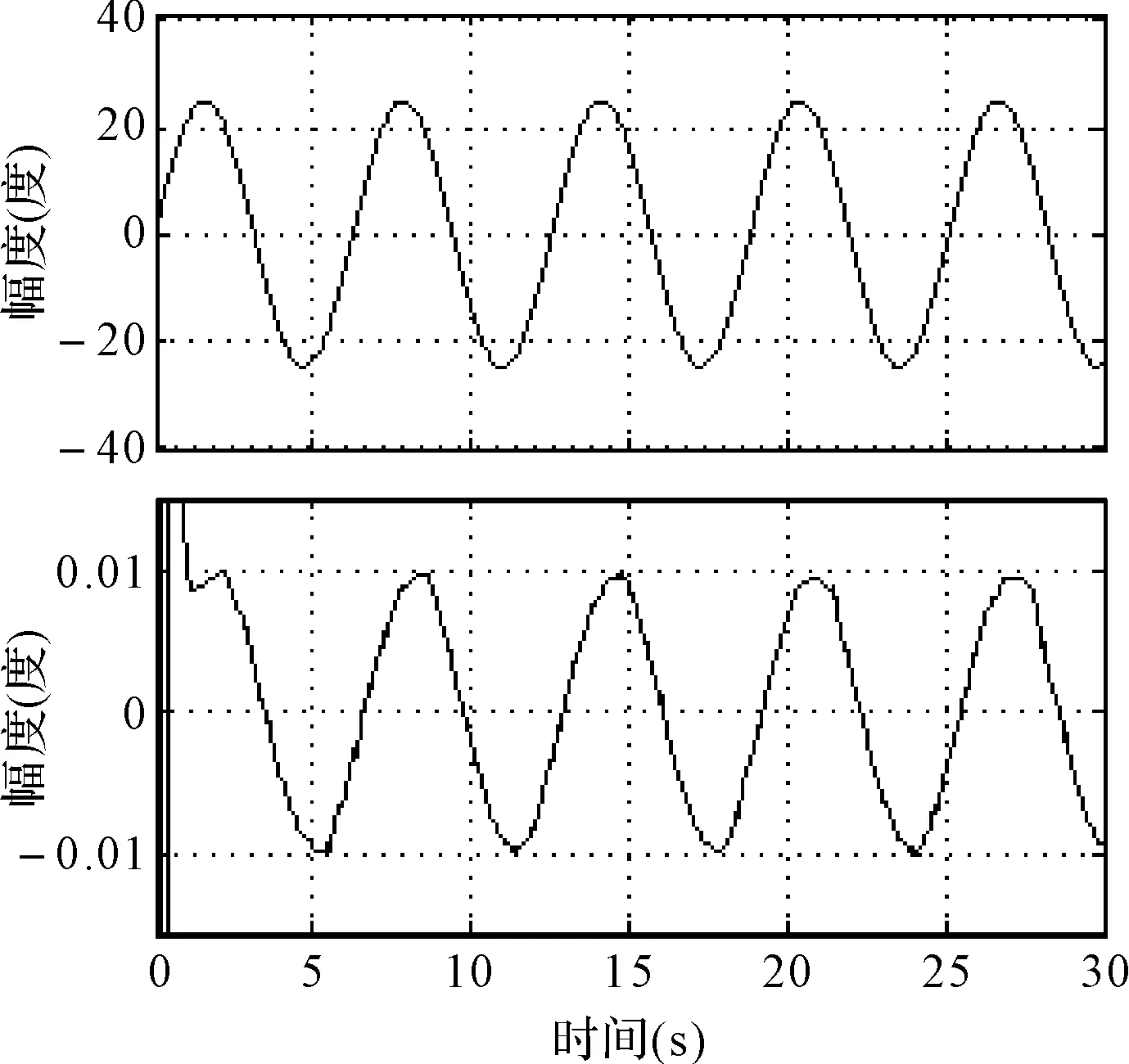
图10 稳定平台的载体扰动与系统输出
就本系统而言,内扰主要由平台系统内部参数辨识的不准确或者参数随环境和时间变化引起的,外扰则主要由基座扰动产生的摩擦干扰力矩引起。保持ADRC控制器各参数不变,改变平台的电气参数,运行仿真,参数改变前后得到稳定角度如图11所示。
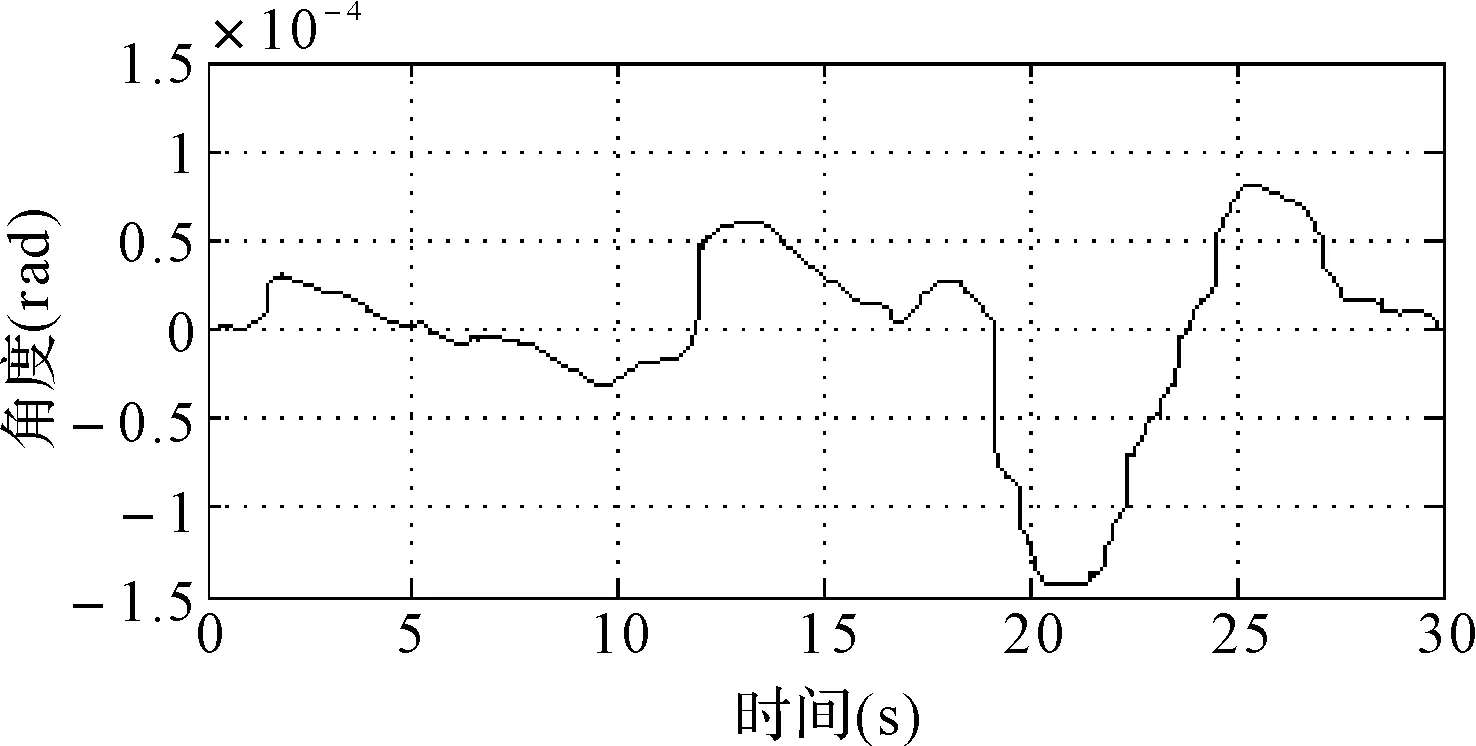
图11 转动惯量变化时稳定平台的稳定角度曲线
可以看出,系统的参数变化后同样能保持较高的精度,验证了ADRC抗内扰的特性,控制器具有较好的自适应性。
6结语
本文对基于自抗扰控制器的重力稳定平台控制系统进行了研究,建立了重力稳定平台的数学模型,阐述了自抗扰控制器的结构及原理,设计了基于自抗扰控制器的重力稳定平台控制系统的核心框架,分别介绍了ADRC算法以及ADRC参数整定过程。仿真结果表明,该系统具有很好的响应特性和自适应性,无超调、响应速度快、无振荡,具有很高的稳态精度,系统对参数变化不敏感,鲁棒性和抗干扰性都很强。
参 考 文 献
[1] 程婧容,杨庆明,谈振藩.惯性平台稳定回路的变结构控制[J].中国惯性技术学报,1999,7(4):73-76.
[2] 魏宗康,等.平台稳定回路的模糊-PID最优控制设计[J].惯导与仪表,2000(3):1-8.
[3] Sun Liming, Jiang Xuezhi, Li Donghai. Tuning of Auto Disturbance Rejection Controller for a Class of Nonlinear Plants[J]. Acta Automatica Sinica,2004,30(2):251-254.
[4] 韩京清.自抗扰控制器及其应用[J].控制与决策,1998(1):18-23.
[5] Dong S. Comments on Active Disturbance Rejection Control[J]. IEEE Transactions on Industrial Electronics,2007,54(6):3428-3429.
[6] 许江宁,朱涛,卞鸿巍.航空摄影陀螺稳定平台[J].仪器仪表学报,2007,28(5):914-917.
[7] 刘金琨.先进PID控制MATLAB仿真[M].第3版.北京:电子工业出版社,2013:201-239.
[8] 宋金来,杨雨,等.惯性平台稳定回路的自抗扰控制[J].系统仿真学报,2002,14(3):391-393.
[9] 尹水红.自抗扰技术在多变量控制系统中的应用[D].北京:华北电力大学,2007:56-59.
[10] 李贤涛,张葆,等.基于自适应的自抗扰控制技术提高扰动隔离度[J].吉林大学学报,2015,45(1):202-208.
中图分类号TP273
DOI:10.3969/j.issn.1672-9730.2016.03.013
作者简介:郭斌,男,硕士研究生,研究方向:惯性技术及应用。
基金项目:国家自然科学基金(编号:41404002,41574069);国家重大科学仪器开发专项(编号:2011yq12004502)资助。
收稿日期:2015年9月14日,修回日期:2015年10月28日