多电源供电的两轮直立智能车系统设计*
2016-04-13龚亚辉何秋生侯赵磊杨海旭
龚亚辉,何秋生,张 森,侯赵磊,杨海旭
(太原科技大学 电子信息工程学院,山西 太原 030024)
多电源供电的两轮直立智能车系统设计*
龚亚辉,何秋生,张森,侯赵磊,杨海旭
(太原科技大学 电子信息工程学院,山西 太原 030024)
摘要:设计了两轮循迹自平衡智能小车系统,并设计太阳能电池和蓄电池联合供电系统为智能小车供电。系统采用飞思卡尔公司生产的MK60单片机作为控制单元,进行数据的采集,计算和传送。惯性测量单元采用单轴陀螺仪ENC-03和三轴加速度计MMA7361配合使用,利用线阵CCD实现智能车的循迹功能。该智能车以太阳能板和蓄电池联合供电以达到节能减排的目的。整个系统的结构简单,功能全面,运行稳定,节能环保。
关键词:MK60单片机;太阳能电池板;ENC-03;MMA7361
随着科技的发展,工业智能化水平越来越高,两轮自平衡电动车以节能环保、灵活便利等诸多优点得到广泛关注和研究。两轮自平衡小车是一个高阶次、强耦合、多变量、不稳定的非线性系统[1]。两轮平衡车系统可以分解为直立、行走、转弯三方面的控制过程,三者相互糅合达到控制平衡车稳定运行的目的。太阳能汽车是以太阳能为能源来驱动系统的汽车。比较传统能源汽车,太阳能汽车无污染,因而太阳能汽车已成为当今汽车行业的发展方向[2]。
本文介绍了一种多电源的两轮循迹自平衡小车的实现方案。通过陀螺仪和加速度计测得的角度信息互补滤波来跟踪车体实时倾角,采用线性CCD传感器检测路径信息,测速编码器测量小车速度。采用经典数字PID算法控制车体的直立、速度和方向。本文针对自平衡硬件平台实现以及整车电路设计等方面作了深入研究。
1系统整体结构设计
硬件部分主要包括循迹电路、测速电路、电机驱动电路、稳压电路和显示电路[3]。两轮平衡车系统结构原理图如图1所示。

图1 智能车系统结构原理图
系统采用飞思卡尔公司生产的MK60单片机作为控制单元,进行数据的采集,计算和传送。根据对资料的分析,以及对性价比的衡量,惯性测量单元采用单轴陀螺仪ENC-03和三轴加速度计MMA7361配合使用。两轮智能车系统框图如图2所示。

图2 智能车系统框图
2硬件系统设计
系统硬件设计包括单片机最小系统模块、线性CCD模块、电机驱动模块、测速模块、陀螺仪和加速度计模块、电源模块等。线性CCD模块检测赛道两边的黑线,通过陀螺仪和加速度计配合检测车身姿态,编码器检测车轮速度。系统采用旋转编码器e6a2-cw3e作为测速元件,分辨率为200P/R,精度上满足智能车速度检测要求[4,5]。
2.1车身倾角检测模块设计
对于姿态检测系统,检测电路分为两部分:陀螺仪信号采集和加速度计信号采集。陀螺仪输出模拟信号,加速度计输出脉冲信号。单片机对传感器输出信号进行AD采样,对测量的数据滤波处理并计算姿态角度,经串口将车体姿态角度显示在上位机上,同时由姿态角信息计算电压控制量驱动电机实现车体平衡。陀螺仪和加速度计的接口电路如图3所示。

图3 陀螺仪和加速度计的接口电路
2.2循迹模块设计
路径检测模块采用128个线性排列的TSL1401线性CCD传感器模块。线性CCD传感器由众多的光电器件组成阵列,可将照射到表面的光的强弱转换成电信号。其成像是一种矩阵扫描过程,当景物光照射到CCD表面时,矩阵高速开关电路逐行逐点地将每点的电信号按顺序输出,因此可以根据接收端接收到反射光线的强弱来判断是黑线还是白线。两轮智能车使用两个线性CCD传感器进行近瞻与远瞻相结合的路径识别策略。单片机根据检测到的黑线白线信息来实时调整智能车行走方向使智能车能沿着正确路径行走。图4是线性CCD接线端口电路。
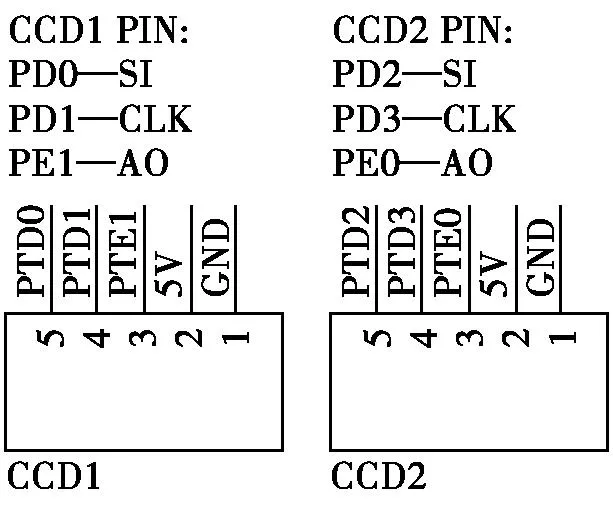
图4 线性CCD接线端口电路
2.3电机驱动模块设计
智能车采用HIP4082作为驱动芯片来驱动直流电机,HIP4082有灵活的输入协议,可驱动每种可能的开关组合。同时用户可以避免直通保护用于开关磁阻电机的驱动。通过IO端口的PWM输出来控制电机的转速。一路电机的驱动电路如图5所示。

图5 电机的驱动电路
2.4电源模块设计
电源模块以7.5 V的镍镉电池作为系统总电源,4块6 V太阳能板并联为电池充电如图6(a)所示。太阳能电池组光线充足时最大输出6 V电压,光线不足时输出电压随着光线的变弱而变小,充电能力也随之下降。7.5 V电源电压接入驱动电路驱动电机工作,然后经图6(b)所示的降压电路将电压降为5 V为最小系统供电。
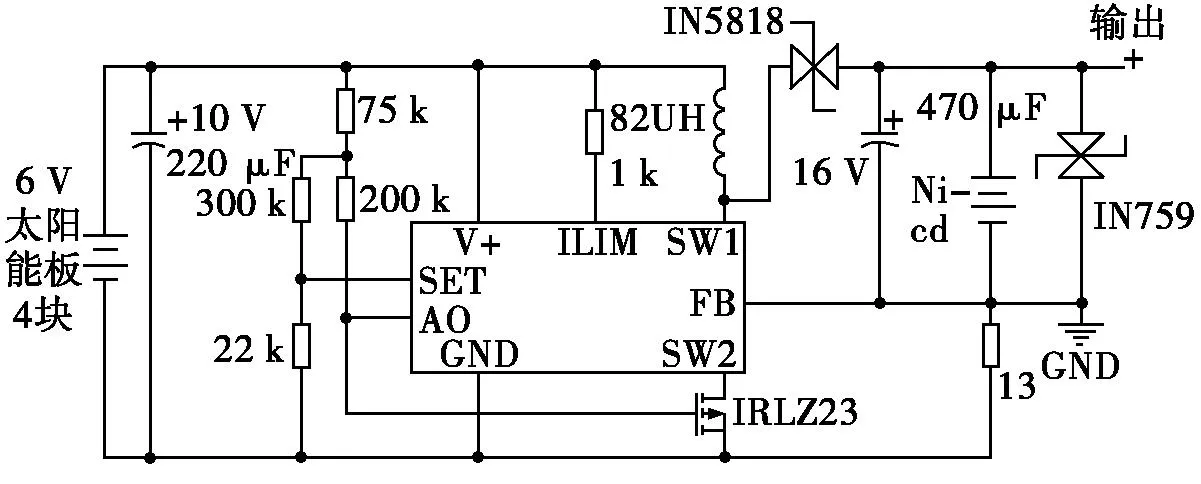
(a) 充电电路

(b) 降压电路
3两轮智能车系统测试结果
两轮智能车实物图如图7所示。经多次测试可以看出两轮智能车能够稳定地按照设定黑色轨迹运动,能在误差允许范围内测得速度并显示。直行时速度能稳定在1.6 m/s;弯道速度能达到1.5 m/s。经过多次试验发现智能车CCD摄像头远瞻距离100 cm,近瞻距离50 cm进行路径识别效果最佳,所以通过对CCD摄像头前瞻角度的调节使得路径标识线距离智能车100 cm内被检测到。
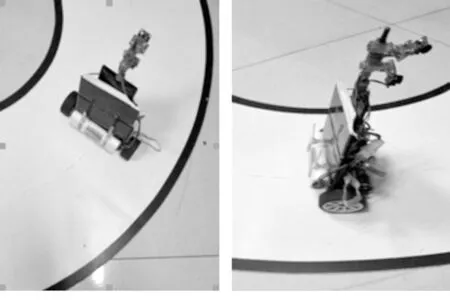
图7 两轮自平衡循迹智能车实物图
4结论
该两轮直立智能车能稳定直立且抗干扰能力强,可以按照预设的轨迹和速度平稳行驶。该智能车系统可用于智能代步车以及智能机器人。
参考文献
[1]王俊,许林,岳东,等.基于CCD的两轮自平衡智能车系统设计[J].信息技术,2013(8):179-182.
[2]徐开芸,韦树成,汪木兰,等.基于AVR单片机的太阳能智能小车控制系统设计[J].机电产品开发与创新,2010(1):141-143.
[3]秦勇,闫继宏,王晓宇,等.两轮自平衡机器人运动控制研究[J].哈尔滨工业大学学报,2008(5):721-726.
[4]王良成,杨志民,胡聪聪,等.两轮自平衡小车的设计与实现[J].实验室科学,2012(6):52-55.
[5]张启秋,蔡雄友,叶骏辉,等.两轮自平衡智能小车控制系统的设计与实现[J].五邑大学学报(自然科学版),2013,27(3):57-60.
The System Design of Two Rounds of Self-balancing Intelligent Vehicle with Multi Power Supply
Gong Yahui, He Qiusheng, Zhang Sen, Hou Zhaolei, Yang Haixu
(SchoolofElectronicandInformationEngineering,TaiyuanUniversityofScience&Technology,TaiyuanShanxi030024,China)
Abstract:An intelligent vehicle with automatic tracking and self-balancing is designed by this paper. A solar cells and battery power system is designed to supply the vehicle power. The system uses MK60 as the core of CPU to calculate and transmit data which is collected from the sensors. The inertial measurement unit is composed of single-axis gyroscope ENC-03 and three-axis accelerometer MMA7361. Linear CCD is used to make the automatic tracking of intelligent vehicle. The intelligent vehicle uses solar panel to provide power that can achieve the goal of energy conservation and emissions reduction. The system is with simple structure, full function, stable operation, and energy conservation and environmental protection.
Key words:MK60 microcontroller; solar panels; ENC-03; MMA7361
中图分类号:TP212.9
文献标识码:A
文章编号:1674- 4578(2016)01- 0031- 02
作者简介:龚亚辉(1994- ),男,河南巩义人,大学本科,研究方向:自动控制。
基金项目:太原科技大学2015年度大学生创新创业训练项目(No.xj2015043);2015年山西省高等学校教学改革项目(No.78)
收稿日期:2015-10-27