基于改进的Sobel算子和Zernike矩的亚像素边缘检测
2016-04-13李仰军
苗 青,李仰军,王 高
(中北大学仪器科学与动态测试教育部重点实验室,电子测试技术国家重点实验室,山西 太原 030051)
基于改进的Sobel算子和Zernike矩的亚像素边缘检测
苗青,李仰军,王高
(中北大学仪器科学与动态测试教育部重点实验室,电子测试技术国家重点实验室,山西 太原 030051)
摘要:针对传统Zernike矩亚像素边缘检测存在的边缘定位精度低和运行速度慢的问题,提出了一种基于改进的Sobel算子和Zernike矩的亚像素边缘检测方法。首先,通过使用改进的Sobel算子检测出所有可能的边缘点,确定边缘点的坐标和梯度大小及方向;最后,利用参考阈值,用Zernike矩算法对所有可能的边缘点进行亚像素的精定位。实验结果表明,与Sobel算法、传统的Zernike矩算法相比,该算法具有更好的定位精度和处理效率,且抗噪性能更好。
关键词:Zernike矩;亚像素;边缘检测;Sobel算子
边缘的检测精度在图像测量中起着关键性作用。边缘是指其领域的像素灰度值急剧变化的那些像素的集合,即图像局部变化最为突出的地方。常用的经典边缘检测模板有Sobel算子、Robert算子、Log算子、Laplace算子等,但这些算子都为整像素级的检测精度,检测速度快但定位精度低。由于高精度边缘检测被实际应用越来越青睐,亚像素边缘检测技术的提出及应用解决上述问题。基于Zernike正交矩的亚像素边缘检测由于采用积分的方式,所以对噪声不敏感[1,2],但其运行速度慢,通过对Sobel算子和Zernike矩算法的优缺点分析研究,提出一种基于改进的Sobel算子和7×7的Zernike矩相结合的边缘检测新方法。首先,采用改进的Sobel算子定位出所有可能的边缘点,细化边缘,再用7×7的Zernike矩算子进行亚像素边缘精定位,提高定位精度的同时减少了算法的运行时间。
1改进的Sobel-Zernike新算法
虽然传统的Zernike矩的检测精度高,但其由于采用积分运算,计算量大,使其运行时间慢,因此,本文提出改进的Sobel算子和Zernike矩相结合的亚像素边缘检测算法。
1.1改进的Sobel边缘检测算法
传统Sobel算子的优点是处理速度快,但其检测的边缘较粗,为了得到细化的边缘,首先通过自适应滤波器滤除图像噪声;其次,采用8个方向的Sobel算子模板[3],利用(1)和(2)式计算原图像的梯度图G1,其中通过引入衰减因子Scale克服边缘图中幅值较小的边缘丢失这一缺陷,得到不失真的梯度图G1,G1=G1/Scale,其中Scale=4;然后再次用提出的Sobel算子模板利用(1)和(2)式检测图像G1得到梯度图G2,G2=G2/Scale,以2次所得梯度图像的差作为细化结果,为图像GG。
(1)

(2)
式(1)(2)中,G表示原图像的矩阵,G′表示图像G中的一个3×3的领域,Ti表示第i个方向模板,Yi表示第i个方向的方向导数的模值,Ymax表示图像G中相应的3×3领域的梯度幅值。
改进的Sobel方法考虑了像素的四个对角方向同时引入了衰减因子,进一步提高了边缘定位的准确度。
1.2Zernike边缘精定位
二维连续图像f(x,y)的n次m阶Zernike矩定义为:

(3)
其中V*nm是Vnm的共轭复数。
传统Zernike矩的亚像素边缘检测原理是根据Zernike矩的旋转不变特性计算出4个边缘参数,并将其参数与预设的阈值相比较,从而精确定位边缘。由图像的亚像素边缘检测理想模型[4,5]可以得到,一幅图像旋转前后模保持不变,只有相角发生变化。旋转后Zernike矩Znm’和旋转前Zernike矩Znm关系和边缘参数φ,如公式(4)所示:

(4)
由图像旋转后各阶Zernike矩公式[6],可计算出其余3个边缘参数h、k、l[7]。其中h为背景灰度,k为阶跃高度,l为单位圆中心到边缘的垂直距离。

(5)
确定了4个边缘参数l、k、h、φ后,可推导出亚像素边缘检测公式为:
(6)
其中(xs,ys)是边缘检测的亚像素坐标,(x,y)表示原点坐标,预设Zernike模板大小为M*M,考虑到模板具有放大效应[8],公式(6)改为:
(7)
1.3图像边缘检测步骤
边缘检测具体步骤如下:
Step1:利用自适应滤波器对目标图像进行预处理,去噪的同时保留边缘信息;
Step2:利用改进的Sobel算子检测图像的所有边缘点,细化边缘,使边缘尽可能多的获取;
Step3:将7×7模板[9]{M00,M11,M20,M31,M40}与上一步检测出的每一个像素点进行卷积得到{Z00,Z11,Z20,Z31,Z40};
Step4:从坐标原点开始,从上到下,从左到右,依次取一像素点,根据前面提到的公式计算像素点的四个边缘参数l、k、h、φ;
Step5:预设两阈值lt、kt,如果该像素点的参数满足l≤lt∩k≥kt,则该像素点为边缘点,且将其图像边缘标为1,利用公式(7)计算其亚像素边缘点;
Step6:反之,返回步骤4,计算下一个像素点。
2仿真结果与分析
为了验证算法的先进性以及良好的抗噪性能,本文仿真设计了两组实验,其中实验利用Matlab7.0工具对本文提出的亚像素边缘检测算法进行实现。
第一组实验采用的是截取的一段子弹灰度图像。图1为分别用传统Sobel算子、改进Sobel算子、传统Zernike矩算法、本文算法提取边缘轮廓。从如下图中可以看出传统Sobel算子检测出的边缘最粗,改进Sobel算子和传统Zernike矩算子相对传统Sobel算子较细,但相对本文算法仍然较粗,本文算法检测的边缘最细,且边缘连续性较好。
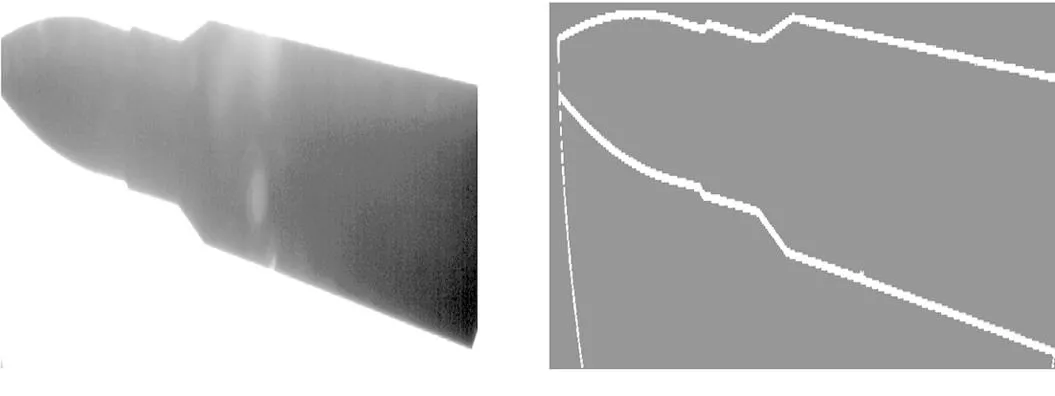
(a) 原始图像 (b) 传统Sobel算子

(c) 改进Sobel算子 (d) 传统Zernike矩
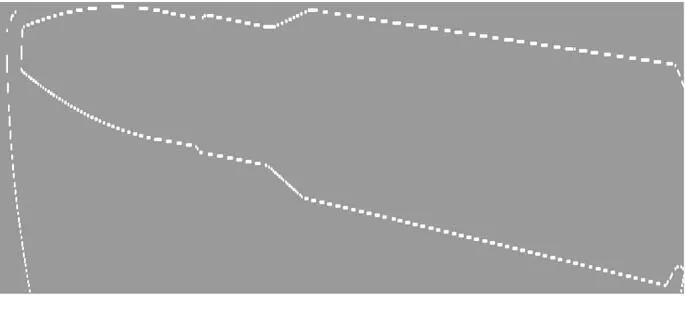
(e) 本文算法
第二组实验采用的是电路灰度图像。图2为分别采用Sobel算子、传统Zernike矩算法、本文算法提取的含高斯噪声的电路边缘图。仿真结果表明,本文算法的抗噪性最好,Zernike矩次之,Sobel算子最差,丢失很多信息。

(a) 加高斯噪声图像 (b) Sobel算子
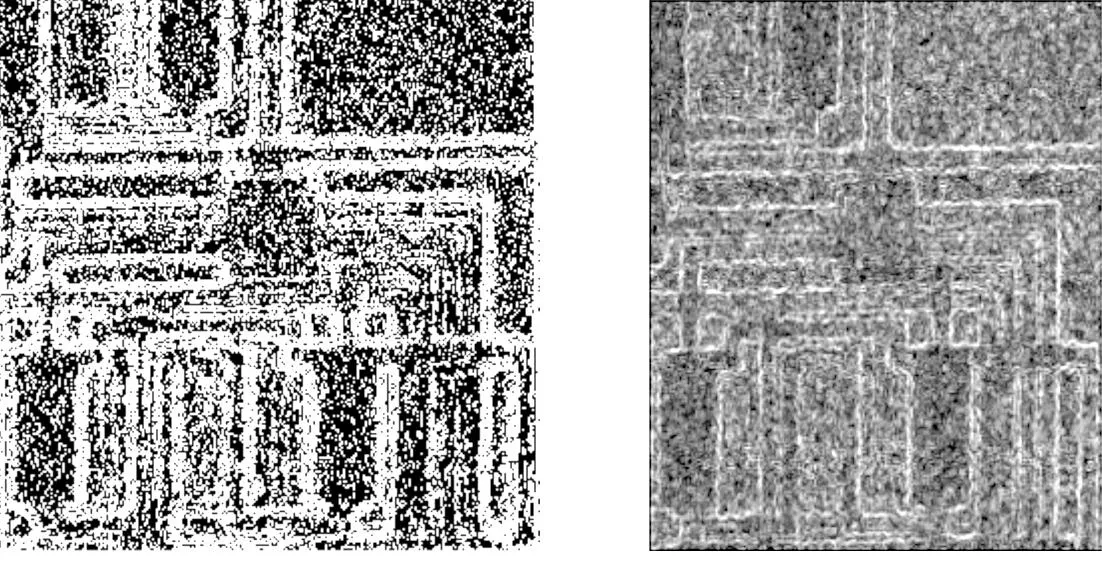
(c) Zernike矩(d) 本文算法
图2不同算法对含高斯噪声电路的边缘检测
3总结
本文介绍了一种将改进的Sobel算子和7*7模板的Zernike矩算子相结合的边缘检测方法,由于改进的Soebl算子运行时间快,抗噪性有所提高,Zernike矩算子具有定位精度高、抗噪性能强的优点,两者结合既提高了定位精度和抗噪性能,又减少了程序的运行时间,但7×7模板的Zernike正交矩算子相对计算量大,对Zernike矩的改进仍待提高。
参考文献
[1]唐坚刚,林新,任琳,等.一种改进的亚像素边缘检测方法[J].信息技术,2014,45(3):1-4.
[2]祝宏,曾祥进.Zernike矩和最小二乘椭圆拟合的亚像素边缘提取[J].计算机工程与应用,2011,47(17):148-150.
[3]李庆利.尺寸测量中的边缘检测算法研究[J].计算机测量与控制,2004,12(4):334-337.
[4]魏本征,赵志敏,华晋.基于改进形态学梯度和Zernike矩的亚像素边缘检测方法[J].仪器仪表学报,2010,31(4):838-842.
[5]罗敏,王琰.一种利用Roberts-Zernike的亚像素边缘检测方法[J].计算机工程与应用,2011,47(5):169-171.
[6]曲迎东,李荣德,白彦华,等.高速的9×9尺寸模板Zernike矩边缘算子[J].光电子·激光,2010,21(11):1683-1687.
[7]Qu Yingdong,Cui Chengsong.A Fast Subpixel Edge Detection Method Using Sobel-Zernike Moments Operator[J].Image and Vision Computing,2005,23(7):11-17.
[8]Li Jinquan,Wang Jianwei,Chen Shanben,et al.Improved Algorithm of Subpixel Edge Detection Using Zernike Orthogonal Moments[J].Optical Technique,2003,29(4):500-503.
[9]高世一,赵明杨,张雷,等.基于Zernike正交矩的图像亚像素边缘检测算法改进[J].自动化学报,2008,34(9):1163-1168.
Subpixel Edge Detection Method Based on Improved Sobel Algorithm and Zernike Moments Operator
Miao Qing, Li Yangjun, Wang Gao
(KeyLabofInstrumentationScience&DynamicMeasurementofMinistryofEducations,NationalKeyLabforElectronicMeasurementTechnology,NorthUniversityofChina,TaiyuanShanxi030051,China)
Abstract:With the consideration of limitation of the subpixel edge detection by Zernike moments, such as low edge location precision and slow running speed, a subpixel edge detection method using improved algorithm Sobel and Zernike moments operator is proposed. Firstly, all possible edge points are detected by improved Sobel operator, and then the coordinates of edge points, gradient module and direction are identified. Finally, all edge points are relocated using Zernike moment operator based on reference threshold value. Compared with the Sobel operator and Zernike moment operator, the experimental results show that the proposed method has better performances in location accuracy, detection speed and noise immunity.
Key words:Zernike moment operator; subpixel; edge detection; Sobel operator
中图分类号:TP391.9
文献标识码:A
文章编号:1674- 4578(2016)01- 0005- 02
作者简介:苗青(1984- ),女,山西太原人,硕士研究生,研究方向为红外成像,图像处理等。
收稿日期:2015-09-21