基于Halbach永磁体阵列的无人机电磁弹射器双边型涡流制动
2016-04-12宋蕾,吴峻,杨宇
宋 蕾, 吴 峻, 杨 宇
(国防科技大学 机电工程与自动化学院,湖南 长沙 410073)
基于Halbach永磁体阵列的无人机电磁弹射器双边型涡流制动
宋 蕾, 吴 峻, 杨 宇
(国防科技大学 机电工程与自动化学院,湖南 长沙 410073)
为了提升无人机电磁弹射器的机动性,末段用于制动弹射台的轨道长度必须受到限制,而制动性能又不受影响,提出了一种基于Halbach永磁体阵列的双边型涡流制动装置。利用二维电磁场分析模型,建立了涡流制动力解析式,确立了永磁体及其相关部件的尺寸;针对Halbach阵列的不同组合排列方式,通过仿真对比,确定了旋转30°Halbach阵列组合方式提供的制动力最大。
电磁弹射器; 永磁直线电机; Halbach永磁体阵列; 双边型涡流制动
0 引 言
无人机电磁弹射器是一种通过将电机的电能转化为无人机起飞的动能,将无人机在较短距离内弹射起飞的发射装置。直线电机作为无人机起飞的动力源,在无人机起飞离开后需要在短距离内实现制动,以便后续再次使用[1]。传统的粘着制动方式损耗大、响应速度慢、存在机械摩擦等局限性,而涡流制动装置与被制动体无直接接触,与传统制动方式相比优势明显[2-5]。
常规无人机电磁弹射器制动方式单一、制动距离长、制动效果不佳[6-7],不能适应现代战场快速作战的要求,涡流制动则正好可以作为其辅助制动方式,增强制动性能。文献[8]提出一种双边型永磁涡流制动装置,初级为由钢板和永磁体构成的双边结构,采用Halbach阵列结构布置,次级为非导磁金属板,但是制动性能提升不明显。文献[9]提出一种直线电机弹射轨道末段定子实铁心涡流制动、基于Halbach永磁体阵列的涡流制动和橡胶阻尼制动等三种方式的综合方案,但采用永磁体单边制动,利用率低,造成永磁材料的浪费。本文基于无人机电磁弹射系统,设计一种双边型永磁涡流制动方式,并提出一种新型Halbach阵列优化方案,通过有限元仿真对优化方案进行分析,并给出仿真结果。
1 涡流制动原理
无人机电磁弹射系统主体由动磁式永磁无刷直流直线电机构成。永磁涡流制动装置安装在直线电机末端,在动子上安装导体板,定子外侧布置永磁体阵列,制动时永磁体穿过双层U型导体板达到制动目的。图1为电磁弹射器涡流制动单边截面结构图。
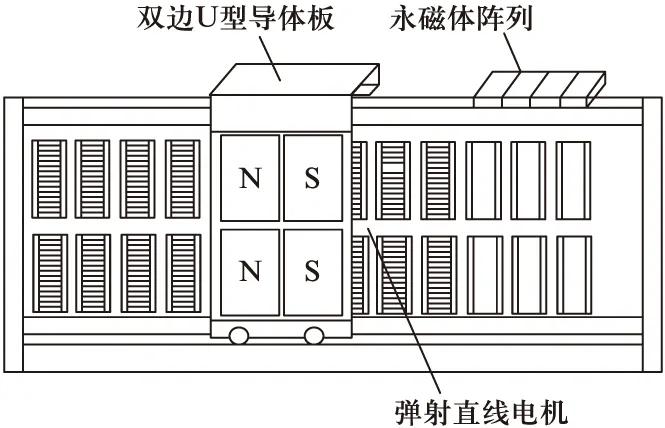
图1 涡流制动单边截面结构图
永磁涡流制动装置利用永磁体代替电磁铁产生磁场,非导磁导体板在永磁体产生的磁场中做切割磁力线运动时,通过导体板的磁场发生变化,变化的磁场在导体板中感应出电动势和电涡流,涡流磁场与永磁体磁场相互作用,产生与非导磁导体板运动方向相反的制动电磁力,从而达到阻碍导体板继续运动的作用[10-11]。从能量的角度看,涡流制动就是利用法拉第电磁感应原理,将导体板运动的动能转化为涡流效应产生的热能进而消耗的过程。
2 永磁涡流制动的制动力解析
2.1 制动力解析
涡流制动结构模型如图2所示,定子由永磁体组成,永磁体N、S极交替排布;动子为非导磁材料的金属板,双边分布在永磁体上下两侧。为了更好地分析涡流制动,简化模型为单边模式,并构建分区域模型如图3所示,区域1为导体板、区域2为气隙、区域3为永磁体阵列。由于涡流磁场是变边界的三维交变电磁场,要准确求解其空间的分布情况和随时间的变化规律非常困难[10]。为简化分析计算作如下假设:

图2 涡流制动结构模型

图3 涡流制动分区域模型
(1) 不考虑磁场饱和以及漏磁的情况;
(2) 所有材料的磁导率、电导率均为常数,相对磁导率为1;
(3) 模型在z方向上无限延伸,气隙磁感应强度沿z方向为恒值,不考虑边端效应;
(4) 导体板足够厚,远大于磁场的透入深度。
通过以上假设,可以将原问题简化为一个二维电磁场求解问题。
由Maxwell电磁场方程组可得,气隙中:
(1)
导体板中:

(2)
由法拉第定律可得

(3)
式中: A1、A2——气隙和导体板中的磁矢位; μ0——真空磁导率; J——导体板中的涡流密度; σ——导体板电导率; v——导体板与永磁体的相对运动速度。
磁矢位A随x方向成周期变化,可得
A=A(y)ejkx
(4)

电磁场方程的解为
A1(y)=C1eky+D1e-ky
(5)
A2(y)=C2eγy+D2e-γy
(6)
在永磁体与气隙边界上,有:
(7)
式中: δ——气隙宽度; c——导体板厚度; Bδn——永磁体与气隙边界上磁通密度x分量n次谐波幅值。
气隙与导体板的边界上:
(8)
由于集肤效应,可以认为导体板下边界上电涡流为零,可得边界条件:

(9)
只考虑基波分量,由上述边界条件可以解得
C2= -D2=
(10)
导体板中涡流损耗为

(11)
式中: p——永磁体极对数; lδ——永磁体宽度。
则涡流制动力为

(12)
其中: k1=Re(γ);k2=Im(γ)。
2.2 制动力特性
为确定永磁涡流制动装置各结构参数,通过制动力解析式,分析制动装置的结构参数变化对制动力特性的影响。
图4为其他参数不变情况下,极距不同时的制动力特性曲线。从图4可以看出,极距变化时制动力峰值并不是线性变化,而是随着极距的增大,制动力峰值先增大后减小,极距为40mm时制动力峰值最大。
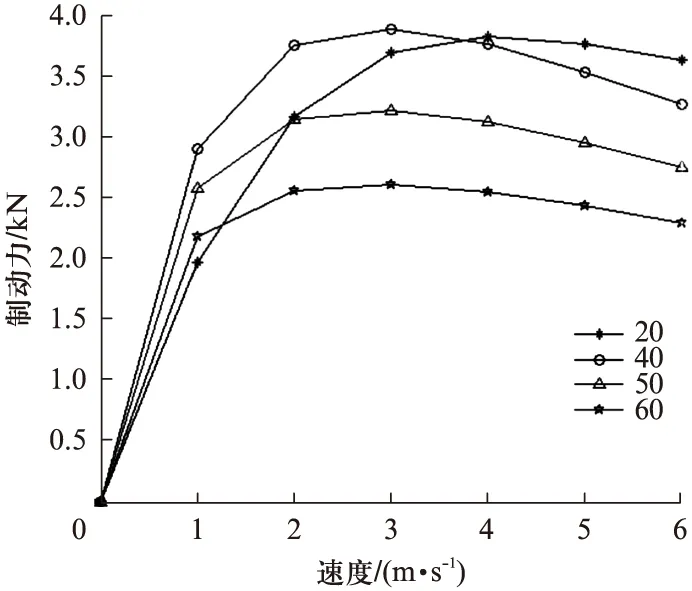
图4 不同极距时制动力特性曲线
图5为气隙长度变化时制动力的特性曲线。从图5可以看出,涡流制动的制动力随着气隙的增大而减小,因为气隙越小,气隙磁通密度就越大,进而产生的制动力就越大。但由于制动装置生产装配的限制,实际气隙并不能做到非常小,根据具体装置尺寸的不同,所适合的气隙长度也有所不同。综合各种因素,本设计选取气隙为2mm。

图5 不同气隙长度时制动力特性曲线
图6为导体板选用不同材料时的制动力特性曲线。从图6可以看出,在低速区,导体板材料为铜、铝时产生的制动力比较大;在高速区,导体板材料为锌、铁时产生的制动力比较大;并且,导体板材料的电导率小的反而临界速度大。

图6 不同导体板材料时制动力特性曲线
3 仿真分析
根据前文结构参数对制动力特性的影响分析,选取涡流制动各结构参数如表1所示,其中永磁体采用钕铁硼(NdFeB)永磁材料,导体板选为密度小、质量轻的铝板。采用有限元仿真软件Ansoft Maxwell进行仿真验证,仿真模型如图7所示,并对仿真得出的制动力与解析法计算的制动力进行比较分析。

表1 涡流制动装置参数表

图7 仿真模型
图8为分别用解析法和有限元法计算出的制动力随速度变化的特性曲线。从图8中曲线可以看出,解析法计算与有限元仿真结果基本可以吻合,但是由于解析法计算过程中作了简化和假设,导致上述两种结果有部分偏差,曲线不能完全一致。
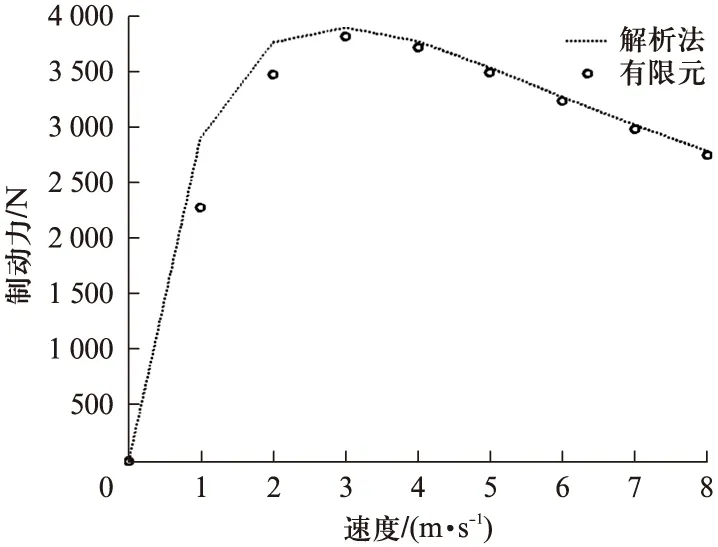
图8 解析法与有限元方法制动力对比曲线
在低速区,制动力随速度增加而变大,在高速区时,制动力反而随着速度的增加而减小。当开始运动时,导体板中产生涡流,但涡流幅值较小,涡流的去磁效应相比于永磁体产生的磁通不是很明显,所以制动力随速度增大近似线性增大;当速度超过临界速度,涡流去磁效应迅速增强,永磁体和涡流共同作用产生的净磁通总量开始减小,因此制动力减小[12]。
4 Halbach优化设计
4.1 Halbach阵列原理
Halbach阵列是一种新型的磁极排布方式。它将不同磁化方向的永磁体按照一定的顺序排列,使得阵列一边的磁场显著增强而另一边显著减弱[13-14]。如图9所示排列组合方式下,径向永磁体阵列和与之正交的永磁体阵列的磁场相互叠加形成合成磁场,永磁体阵列顶部几乎没有磁力线分布,所有磁通都集中在Halbach阵列底部,使底部磁通增强。

图9 Halbach阵列磁力线分布
4.2 Halbach阵列排列方式分析
理想的Halbach阵列由一块磁化强度沿阵列方向呈正弦变化的永磁体构成。Halbach阵列也可以由分段磁体构成,各磁体的磁化方向沿阵列依次旋转一角度[13],如旋转90°、旋转45°、旋转30°等,如图10所示。
根据Halbach阵列可以削弱一侧磁场,增强另一侧磁场的特性,设计上下交错叠加的永磁体新型排列组合方式,对永磁阵列双边磁场均产生增强效果。如图11所示分别为充磁方向旋转90°、旋转45°、旋转30°的双边Halbach阵列排列方式与普通永磁体阵列。

图10 Halbach阵列排列方式

图11 双边Halbach阵列排列组合方式
为验证三种设计的永磁体排列组合方式性能优劣,依次建立Maxwell有限元仿真模型,进行仿真分析,采用普通阵列作为对比,仿真模型如图12所示。
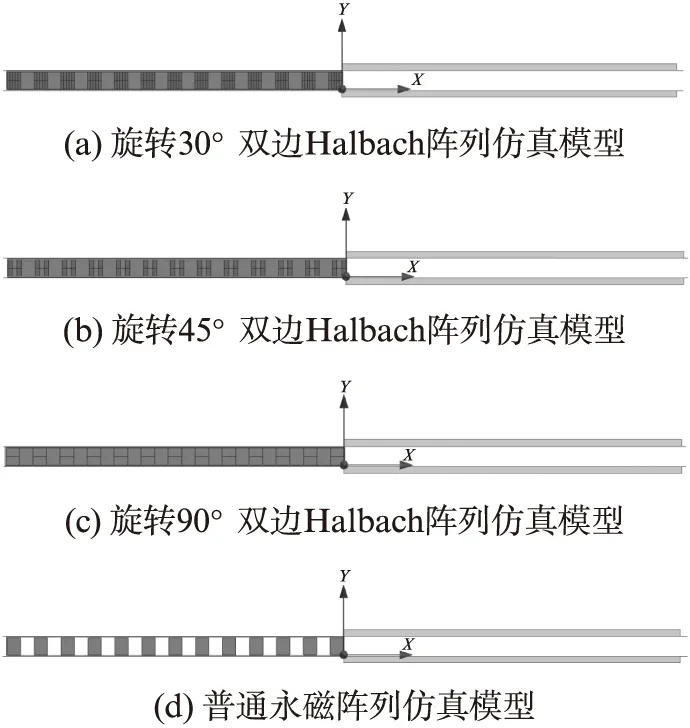
图12 Maxwell有限元仿真模型
图13表示四种不同磁极排列结构下的制动力特性曲线。从图13可以看出,旋转Halbach阵列组合方式涡流制动力随速度变化也是一个先增长后下降的过程,其制动力较普通永磁体排布大。但随着磁极充磁角度的改变,制动力的增长并不是一个线性的关系,Halbach阵列充磁角度为旋转30°时的制动力最大,其次为旋转90°、旋转45°Halbach阵列组合方式。
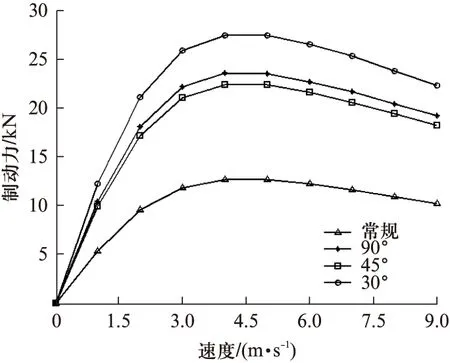
图13 不同磁极组合方式制动力特性曲线
在两个极距距离内不同磁极组合方式气隙磁通密度法向分量By分布如图14所示。从图14可以看出采用Halbach阵列组合方式气隙磁通密度法向分量明显提升,峰值从0.5T升至0.8T。Halbach阵列结构不仅可以提高气隙磁场强度,同时也会影响磁场分布。普通永磁体阵列下,气隙磁场几乎呈梯形分布;而在Halbach阵列下,由于其他方向充磁永磁体的存在,梯形磁场平顶两端磁场强度明显大于中心处磁场强度,即出现了两个尖端,同时,平顶宽度也有所增大。其中,旋转30°的方式气隙磁通密度法向分量波形效果提升最明显。

图14 气隙磁通密度法向分量分布曲线
通过以上分析可以得出,旋转30°的双边Halbach阵列排列方式性能较普通阵列有明显改善,性能更佳。
4.3 仿真对比
通过上文比较分析,选取旋转30°双边Halbach阵列排列方式作为永磁阵列的优化方案。针对无人机电磁弹射器性能指标,制动质量设为50kg,制动初速度为20m/s,制动距离为0.5m。对旋转30°双边Halbach阵列排列方式与原普通永磁体排列方式两种制动方案进行有限元仿真对比,仿真结果如下。
图15表示两种结构制动过程中制动力的变化情况。从图15可以看出,优化后制动力峰值达到27.15kN,优化前制动力峰值为22.89kN,优化后制动力峰值有较大提升,且制动力的变化率也大于优化前。

图15 制动力对比曲线
图16表示两种结构制动过程中动子及弹射台速度的变化情况,速度的变化体现了制动性能的优劣。从图16可以看出,优化前制动速度从20m/s降为13.28m/s;优化后制动速度降为11.72m/s。制动消耗动能效果提升50.44%,制动性能提升明显。优化前后制动效果对比情况汇总如表2所示。

图16 速度随位移变化对比曲线
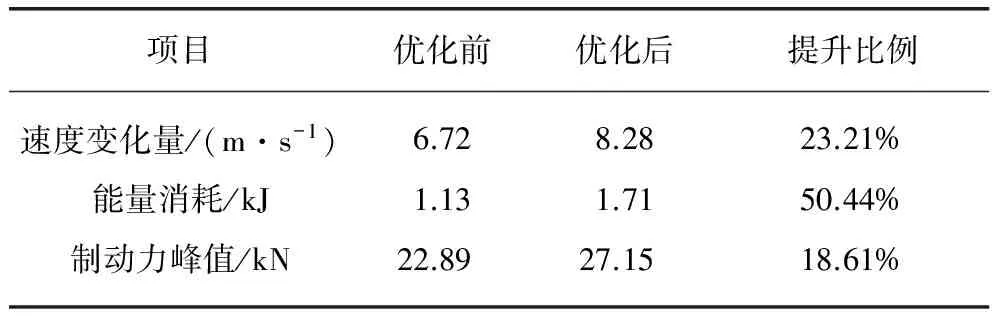
项目优化前优化后提升比例速度变化量/(m·s-1)6.728.2823.21%能量消耗/kJ1.131.7150.44%制动力峰值/kN22.8927.1518.61%
5 结 语
为提升无人机电磁弹射系统机动性,提出双边永磁涡流制动方案,通过解析法和有限元法对涡流制动的制动力特性进行了分析和比较。得出以下结论:
(1) 用解析法讨论了永磁体极距、气隙长度和导体板材料对制动力特性的影响,确定涡流制动各部件结构尺寸。
(2) 提出新型Halbach阵列排列组合方式,通过仿真分析对比得出,旋转30°Halbach阵列组合方式提供的制动力最大,制动效果最佳,优化后制动力峰值提升18.61%,制动耗能增加50.44%,在有限距离内提升弹射系统机动性。
(3) 本文仅进行了软件仿真验证,为涡流制动提出一种新的永磁阵列组合方式。具体实际情况还需要进一步的实物试验验证,例如永磁体的充磁方式、安装等实际问题都需要进一步考虑。
[1] 赵宏涛,吴峻.直线永磁无刷直流电机电磁制动方案设计[C]∥湖南省第二届研究生创新论坛论文集,长沙,2009: 43-47.
[2] GAY S E, EHSANI M. Analysis and experimental testing of a permanent magnet eddy-current brake[C]∥IEEE Vehicle Power and Propulsion Conference, 2005: 756-765.
[3] 唐永春,叶云岳.永磁涡流制动的有限元分析与设计[J].微电机,2006,39(3): 34-36.
[4] 张圣楠.永磁涡流制动的电磁分析与设计[J].内蒙古科技与经济,2005(13): 118-120.
[5] 朱仙福.线性涡流制动电磁分析[J].上海铁道大学学报,1994(2): 55-63.
[6] 吴峻,赵宏涛,罗宏浩.电磁弹射过程中涡流引入阻力的分析[J].国防科技大学学报,2011,35(5): 69-72.
[7] ZHOU S G, YU H T, HU M Q, et al. Design of permanent magnet eddy current brake for a small scaled electromagnetic launch model[J]. Journal of Applied Physics, 2012,111(7): 738-740.
[8] 肖尧,吴峻.电磁飞机弹射系统永磁涡流制动装置的分析与设计[J].微特电机,2013,41(8): 10-12.
[9] 吴峻,杨宇,赵宏涛,等.无人机电磁弹射器的综合制动方法研究[J].国防科技大学学报,2015,37(5): 61-66.
[10] 贾强,高跃飞,佟彦发,等.直线型涡流缓冲装置的设计[J].工程设计学报,2011,18(3): 209-213.
[11] 赵小波,姬长英,周俊.永磁涡流制动技术及其应用研究[J].新技术新工艺,2007,23(10): 58-62.
[12] 寇宝泉,金银锡,张赫,等.混合励磁直线电磁阻尼器的特性分析[J].中国电机工程学报,2013,33(24): 143-151.
[13] 周赣,黄学良,周勤博,等.Halbach型永磁阵列的应用综述[J].微特电机,2008,36(9): 52-55.
[14] KRISHNAN R.永磁无刷电机及其驱动技术[M].北京: 机械工业出版社,2012.
Double-Sided Eddy Current Brake of Electromagnetic Launcher for Unmanned Aerial Vehicle Based on Halbach Permanent Magnet Array
SONGLei,WUJun,YANGYu
(College of Mechatronics Engineering and Automation, National University of Defense Technology, Changsha 410073, China)
To enhance the maneuverability of electromagnetic launcher(EML) for unmanned aerial vehicle(UAV), the end orbit for braking the launching platform should be limited without degrading performance. It proposed a double-sided eddy current brake based on Halbach permanent magnet array. On the basis of analytical two-dimensional field solutions, the braking force was predicted.The sizes of permanent magnet and other components were given.A comparative simulation was designed. The results showed that 30° rotary Halbach arrangement was considered to be the best one among three different Halbach arrangements.
electromagnetic launcher; linear permanent magnet motor; Halbach permanent magnet array; double-sided eddy current brake
宋 蕾(1991—),女,硕士研究生,研究方向为电磁弹射技术。 吴 峻(1973—),男,博士生导师,研究员,研究方向为电磁弹射技术与传感器技术。 杨 宇(1990—),男,硕士研究生,研究方向为永磁直线电机设计与控制。
TM 351;TM 359
A
1673-6540(2016)07-0021-06
2015-11-13
