基于模型参考自适应的三轴转台系统控制研究
2016-04-12Studyofthreeaxisturntablesystembasedonmodelreferenceadaptive
Study of three-axis turntable system based on model reference adaptive
赵小刚,郭永凤
(陕西国防工业职业技术学院,西安 710302)
ZHAO Xiao-gang, GUO Yong-feng
基于模型参考自适应的三轴转台系统控制研究
Study of three-axis turntable system based on model reference adaptive
赵小刚,郭永凤
(陕西国防工业职业技术学院,西安 710302)
ZHAO Xiao-gang,GUO Yong-feng
摘要:为了解决受控对象发生变化时,系统不能得到满意结果的问题,提出了一种基于模型参考自适应控制的方法对受控对象进行控制。设计了Narendra自适应控制器,对实验室三轴姿态模拟器外框电机模型进行控制。仿真结果表明,模型参考自适应控制方法能很好的补偿系统特性的变化,使系统在由于运行条件变化而导致受控对象变化时,仍然能得到预想的效果。这种控制方法增强了系统对不同条的适应能力,使系统具有更广泛的适用对象。
关键词:自适应控制系统;模型参考自适应控制;受控对象;模型输出
0 引言
典型的自适应控制系统主要分为两种:模型参考自适应控制系统和自校正控制系统。模型参考自适应控制系统是比较常用的自适应控制系统,是目前解决自适应问题的主要方法之[1]。当运行条件变化时,系统有时并不能得到满意的结果[2]。自适应控制的目的之就是补偿系统特性的变化,以获得比常规控制更好的性能,满足些特殊控制问题的要求。控制器,被控对象以及自适应机构组成了模型参考自适应系统[3,4]。
与常规控制相比,模型参考自适应控制具有控制器可调、增加自适应回路以及适用对象广泛的优点。模型参考自适应控制目的是使系统输出完全跟随模型输出[5]。应该指出的是,虽然参考模型体现了设计的指标,但此时参考模型已经是控制系统的个组成部分。模型参考自适应控制实用价值明显,通常用模拟元件就可以实现,而且速度快[6]。

图1 模型参考自适应控制结构原理图
模型参考自适应控制的结构原理图如图1所示。由于外界或自身的原因系统的特性发生变化时,将导致受控对象输出与参考模型输出间误差的增大。于是,系统的自适应机构再次发生作用调整控制器的参数,使得受控对象的输出再次趋近于参考模型的输出(即与理想的希望输出相致)。
系统整定原则是使ym(t)与yp(t)之差最小[7],控制的关键是设计调整机构使误差趋于零。
1 Narendra自适应控制器的设计
1.1参考模型的设计
典型的二阶模型,其传递函数为:

闭环传递函数为:

式中:


1.2自适应控制律的设计
由前面的分析可知,被控对象的相对阶数为2。
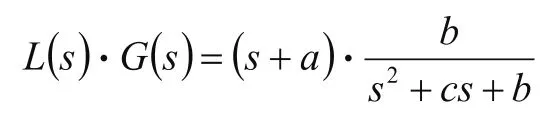
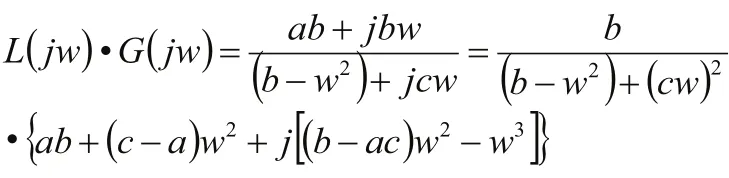
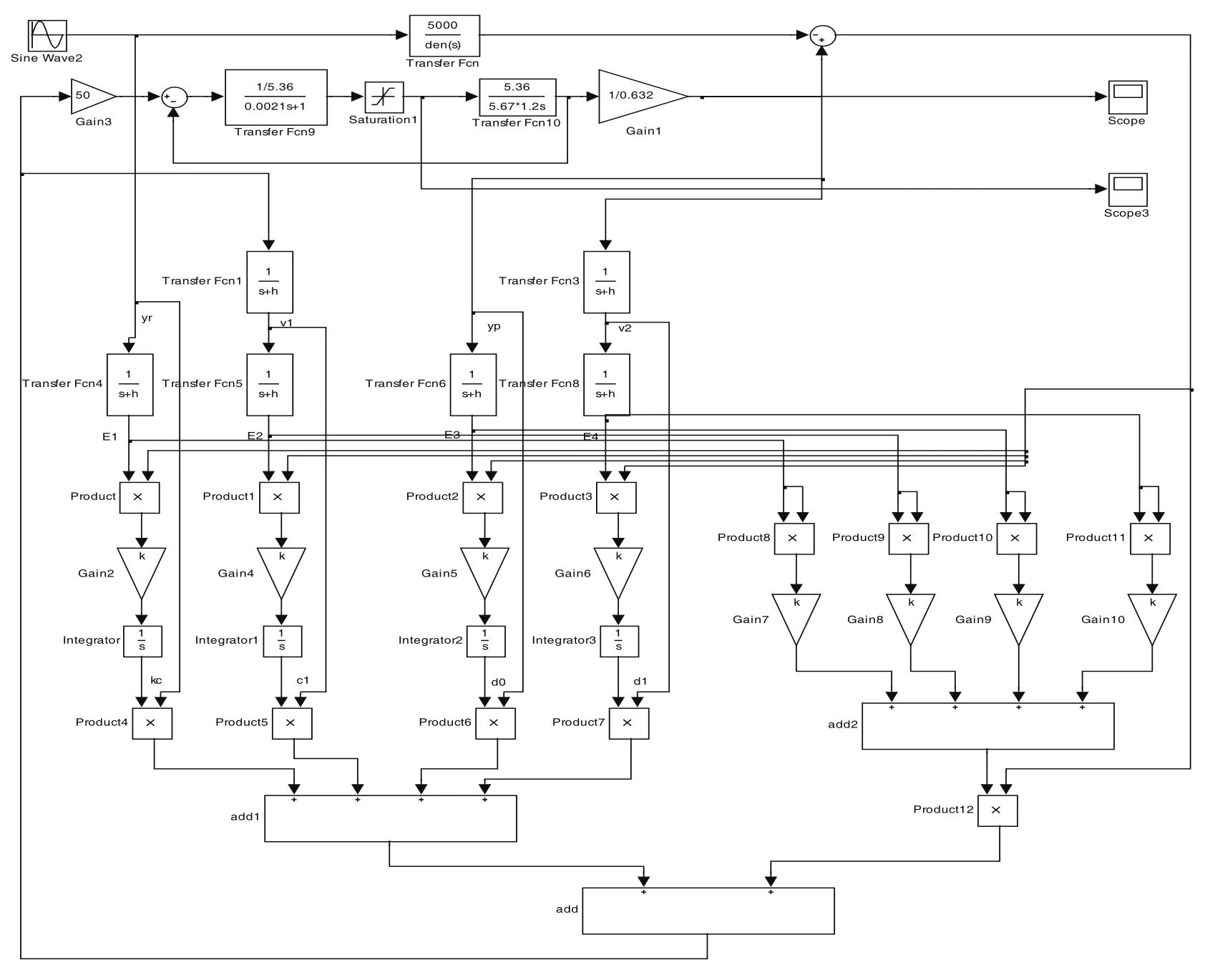
图2 自适应控制系统
令s=jw,可得:要使上式严格正实,需要0<a<c,本文取a<100。
2)构造两个辅助信号发生器:

3)建立可调自适应律:
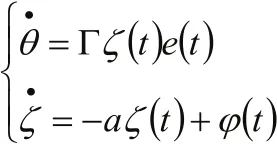
式中:

4)建立自适应控制律:
自适应控制律为:

根据建立的自适应控制律,可得系统的Simulink模型如图2所示。
根据得到的仿真模型可以看出,只要调节两个参数即k和h就可以实现电机的调速控制。
2 仿真结果
分别在输入端加阶跃信号,正弦信号,斜坡信号,得到的仿真结果如下:
1)阶跃信号响应
设定两个可调参数分别为h=10,k=-500,电流限幅为12A,分别在输入端施加幅值为3rad、1rad、0.5rad的阶跃响应得到系统的输出结果如图3、图4和图5所示。

图3 输入3rad/s时系统阶跃响应

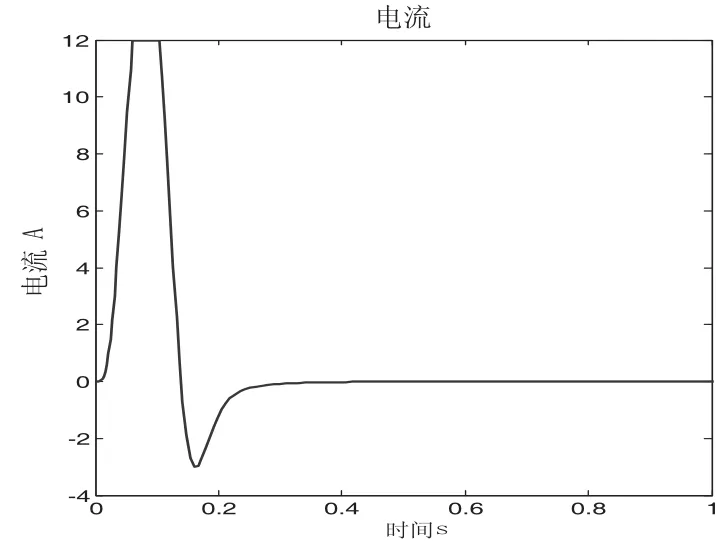
图4 输入1rad/s时系统阶跃响应

图5 输入0.5rad/s时系统阶跃响应
2)斜坡信号响应
设定两个可调参数分别为h=80,k=-2000,电流限幅为12A,分别在输入端施加斜率为:14rad/s2、8rad/s2、1ad/s2的阶跃响应得到系统的输出结果如图6~图8所示。


图6 输入14rad/s2时系统斜坡响应

图7 输入8rad/s2时系统斜坡响应

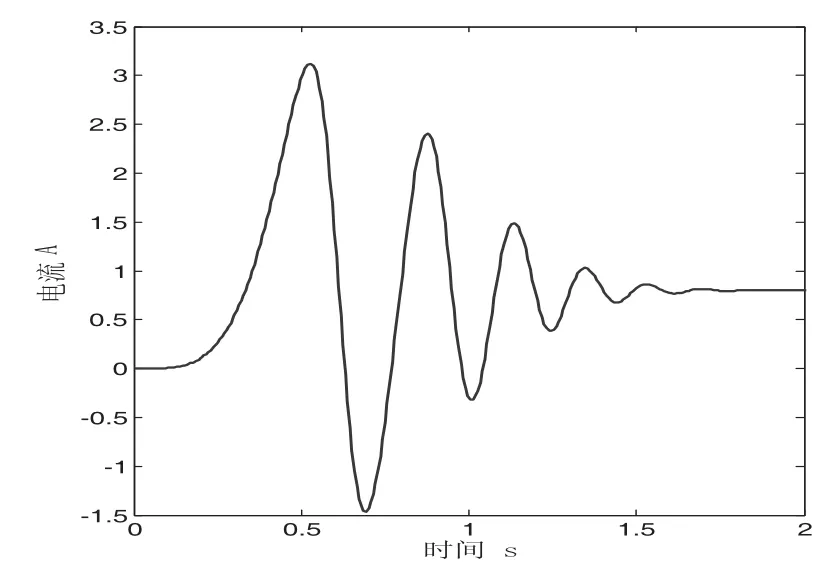
图8 输入1ad/s2时系统斜坡响应
3)正弦信号响应
设定两个可调参数分别为h=10,k=-15000,电流限幅为12A,分别在输入端施加幅值为0.74rad/s,频率为3Hz,1.5Hz和0.5Hz的正弦信号输出结果如图9~图11所示。

图9 输入3Hz时系统正弦响应

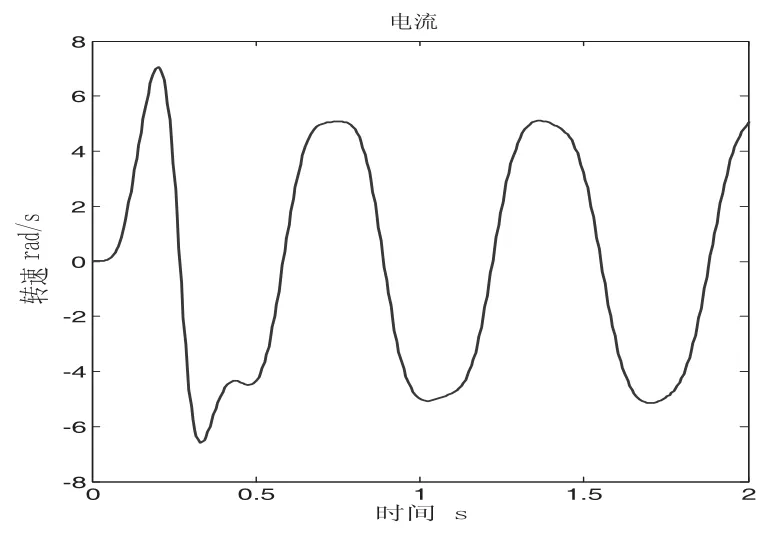
图10 输入1.5Hz时系统正弦响应

图11 输入0.5Hz时系统正弦响应
3 结论
1)由图3、图4、图5可以看出:在模型参考自适应控制方法下,由于加入限幅作用使得响应曲线对于模型输出曲线有定程度上的滞后,转速超调增大。这是因为饱和环节将电流限制到了12A,电机的加速力矩有限。虽然响应曲线有定的滞后,但是输出转速的上升时间都在0.2s以内,而且系统无静差,因此可以满足调速要求。
2)由图6、图7、图8可以看出:当输入的角加速度为14rad/s2时,电机输出对模型的跟踪效果比较好;输入的角加速度为8rad/s2时,电机输出在0.4s时实现了对模型的跟踪;输入的角加速度为1rad/s2时,电机输出在1.4s时实现了对模型的跟踪。这说明随角加速度的增大,系统对斜坡输入的跟踪效果逐渐增强。从响应曲线可以看出,本文所设计的模型参考自适应控制器可以使系统具有良好的加速性能。
3)由图9、图10、图11可以看出:当输入信号频率为3Hz、1.5Hz以及0.5Hz时,除了在开始的个很小时间段内,电机输出与输入信号差距较大外,电机输出都很好的实现了对输入信号的跟踪。系统的输出幅值误差和相位误差都非常小。这说明模型参考自适应控制器可以实现对正弦信号的良好跟踪。
参考文献:
[1] James W. Gilbart, George C. Winston. Adaptive compensation for optical trackingtelescope [J].Auromatica,1974,10(2):132-145.
[2] Landau ID. A hyperstability criterion for model-reference adaptive systems[J].Automatic,1969,15:552-555.
[3] 吴忠强.两种跟踪低阶模型的模型参考自适应控制方案的设计与仿真[J].系统仿真学报,2002,4(1):116-118.
[4] Sburn P V,Whitaker H P, Kezer. A new development in the design of adaptive control systems[J], INST.Aeronautical Sciences, 1961,61-139.
[5] Park P C. Lyapunov redesign of model reference adaptive control systems[J].IEEE Trans.Automatic Control,1966,11:362-367.
[6] Narenda, K S,Valavani, L S.Direct and indirect control[J], IEEE,1979,17(115):635-643.
[7] Liu Mingji, Cai Zhongqin,Cheog Ximing, Onyang Minggao. Adaptive position servo control of permanent magnet synchronous motor[J].Proceedings of the American Control Conference,2004, 1(12):84-89.
[8] 张健.基于MATLAB的轴角振动台动力学耦合特性研究[J],制造压自动化,2013,4:67.
机器人技术
作者简介:赵小刚(1981 -),男,陕西户县人,硕士研究生,研究方向为CAD/CAM/CAE。
收稿日期:2015-11-03
中图分类号:TP273
文献标识码:A
文章编号:1009-0134(2016)03-0033-05
