MODBUS/TCP协议下多轴直线电机控制系统探究
2016-04-11何小虎党学明刘美津
何小虎,党学明,刘美津,李 洋
(合肥工业大学 仪器科学与光电工程学院,安徽 合肥 230009)
MODBUS/TCP协议下多轴直线电机控制系统探究
何小虎,党学明,刘美津,李 洋
(合肥工业大学 仪器科学与光电工程学院,安徽 合肥 230009)
文章针对控制系统高精度、高效率、网络化、模块化的趋势,设计了多轴直线电机网络化控制系统,阐述了直线电机在精密定位平台中的优势和使用方法,详细论述了MODBUS/TCP协议构建网络化控制系统的实现方法。人机界面(HMI)通过以太网,实现了对运动平台的运动控制和状态信息的实时获取,得出运动平台具有很高的控制精度和系统稳定性,重复定位精度低于1。
直线电机;MODBUS/TCP协议;运动控制
工业以太网技术具有价格低廉、稳定可靠、通信速率高、软硬件产品丰富、应用广泛以及支持技术成熟等优点,已成为最受欢迎的通信网络之一。新一代工业自动化网络几乎都是建立在以太网基础之上,从总线技术的发展方向来看,所有现场总线最终都将向工业以太网过渡,许多基于现场总线的控制系统最终都将连接到工业以太网。工业以太网是工业控制系统的一个发展方向[3]。作为工业以太网应用层协议的MODBUS/TCP协议,已经成为中国工业网络的标准。
本文以平板显示屏自动光学检测系统的检测平台为例,介绍了多轴直线伺服电机在精密驱动定位平台上的使用方法和基于MODBUS/TCP协议的分布式网络控制系统的应用技术。
1 系统设计
平板显示屏自动光学检测系统的运动平台需要两个直线电机作同步进给运动,要求运动过程具有高定位精度、高速度、高可靠性。运动平台的系统框图如图1所示。包括人机界面(HMI)、运动控制器(MP2300S)、直线伺服单元(伺服驱动器SGDV1R6A15A和直线电机)三个部分。
MP2300S是安川公司推出的一款集电源功能、CPU功能、I/O功能以及通信功能于一体的、采用多功能结构设计的小型机器控制器。可控制最多达16轴支持的MECHATROLONK-II的伺服。MP2300S内置的218IFA模块是10Base-T/100Base-T Ethernet接口,也是MP2300S标准配备的通信接口,可支持100Mbps的传送速度,支持多种通信协议,如MEMOBUS协议、扩展MEMOBUS协议、MODBUS/TCP协议等。当使用MOBUS/TCP协议时,最大通信量为:写入100W,读出125W。
直线伺服单元包括两个主要部分:MECHATROLINK-II通信指令型直线伺服电机驱动器(SGDV-1R6A15A)和SGLGW型直线伺服电机(动子SGLGW-40A253CP,定子SGLGM-40450CT)。SGDV型直线伺服电机驱动器可以实现实时通信,以最大传送速度10Mbps和可设定的通信周期250us-4ms,实现了最多30站的高速控制和高精度的运动控制,除了转矩、位置和速度控制外,还可以实现精度要求极高的同步相位控制。由于可在线切换控制模式,因此可以更有效、平滑的实现复杂的机械动作。SGLGW型直线伺服电机,使机械进给机构直接化,从而实现机械的高速、高精度定位,实现无吸引力、低噪音化以及导轨的长效化,同时由于无齿槽效应,有利于低推力脉动化。
系统控制包括两个独立数据流。第一个是工作流程,人机界面(工业平板电脑)与运动控制器之间通过交换机构成以太网,HMI发出控制指令后,通过MODBUS/TCP协议发送到MP2300S的通信模块218IFA,MP2300S将控制指令经过解析后转换成伺服控制指令,经过M-II(MECHATROLINK-II)总线,实现对直线电机的速度控制和位置控制。第二个是配置流程,安装有MPE720软件的现场电脑,通过交换机,可直接与MP2300S进行通信,进而实现对MP2300S的系统参数配置以及伺服单元的伺服参数配置和固定参数配置。
BP算法是非循环多级网络的训练算法,其学习过程由正向传播和反向传播组成。输入值经过非线性变换,从输入层经隐层单元逐层处理,并传向输出层,每一层神经元的状态将影响到下一层神经元状态,如果在输出层不能得到期望的输出,则转入反向传播,通过修改各神经元权值,使误差信号最小。

图1 运动平台系统框图
2 MODBUS/TCP协议简介
MODBUS协议是OSI模型第7层上的应用层报文传输协议,将MODBUS帧嵌入到TCP帧中,使MODBUS与以太网和TCP/IP结合,成为MODBUS/TCP[4]。它连接至不同类型总线或网络设备之间提供客户机/服务器通信。
MODBUS是一个请求/应答协议,并且提供功能码规定的服务。MODBUS/TCP是运行在TCP/IP上的MODBUS报文传输协议,MODBUS报文传输服务提供设备之间的客户机/服务器通信,这些设备连接在一个Ethernet TCP/IP网络上。这个客户机服务器模式是基于四种类型报文:MODBUS请求、MODBUS指示、MODBUS响应、MODBUS证实。如图2所示。
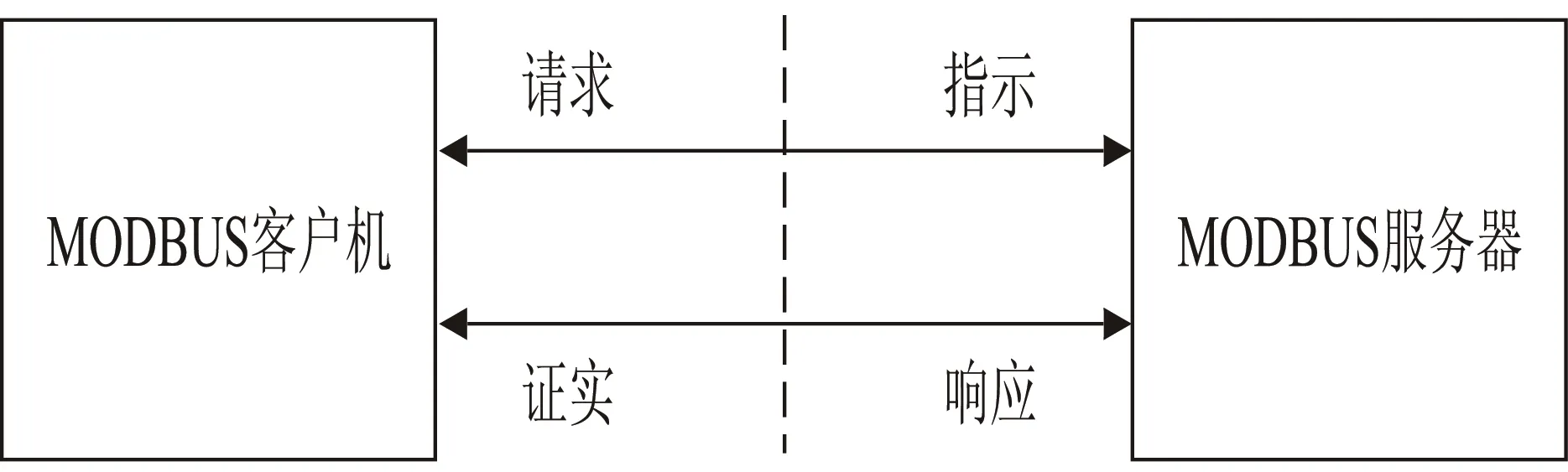
图2 MODBUS协议模式
MODBUS请求是客户机在网络上发送用来启动事务处理的报文。
MODBUS指示是服务器接收的请求报文。
MODBUS响应是服务器发送的响应信息。
MODBUS证实是客户机接收的响应信息。
MODBUS协议定义了一个与基础通信层无关的简单协议数据单元(PDU)。在TCP/IP协议上的报文帧结构如图3所示。
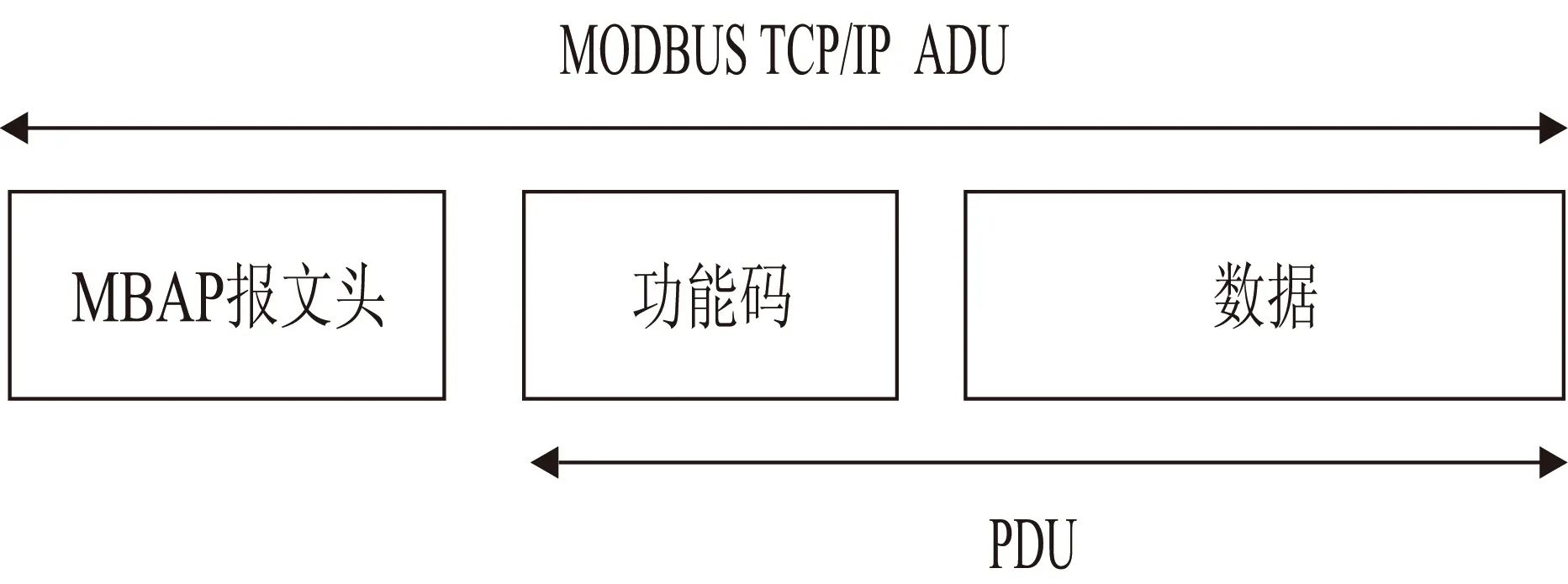
图3 MODBUS/TCP报文帧结构
MBAP报文头(Modbus Application Protocol
Header)是在TCP/IP上使用的一种专用报文头,以识别MODBUS应用数据单元。
MBAP报文头长度为7个字节。报文头格式如图4所示。

图4 MBAP报文头格式
事务处理标识符(2个字节):用于事务处理配对,在响应中,MODBUS服务器复制请求的事务处理标识符。对于TCP连接来说,在同一时刻,这种标识符必须是唯一的。
协议标识符(2个字节):用于系统内的多路复用,通过0x0000识别为MODBUS协议。
长度(2个字节):包括单元标识符和数据域的字节数。
单元标识符(1个字节):为了系统内路由,对于TCP/IP来说,利用IP地址寻址MODBUS服务器,此时MODBUS单元标识符是没用的,必须使用值0xFF。
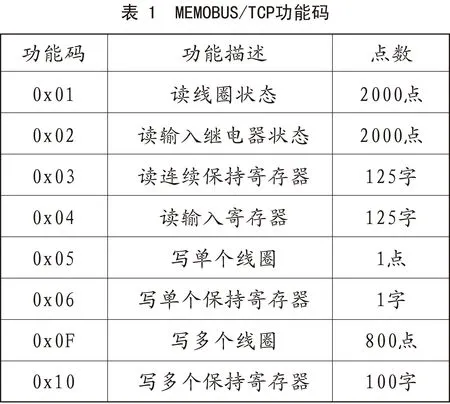
启动MODBUS事务处理的客户机建立MODBUS应用数据单元,功能码向服务器指示执行哪种操作。MODBUS用一个字节编码数据单元的功能码域,不同的功能码对应不同的数据域。MODBUS/CTP部分功能码如表1所示。
3 系统软件实现
Visual C++是Microsoft公司推出的开发win32环境程序,面向对象的可视化集成编程系统。用VC++开发人机界面,可通过界面上的按钮完成直线电机的速度控制和位置控制,同时实时采集运动平台的状态信息和电机运行信息。使用BSD套接字通信接口,实现TCP/IP通信的流程如图5所示。

图5 TCP/IP通信逻辑流程图
HMI为客户端,即MODBUS请求发起端。MP2300S为服务器端,对HMI的MMODBUS请求做出响应。实际使用工业平板电脑作为上位机,主要完成三个功能:
(1)构建人机界面(HMI),通过HMI按钮实现人机交互,同时实时显示运动平台的运动状态信息;
(2)通过MODBUS/TCP协议,将HMI发出的控制指令发送到MP2300S,完成运动平台的运行控制;
(3)通过MODBUS/TCP协议,实时查询运动平台的运行信息,特别是警告与警报信息。
MP2300S中的信息接收函数MSG-RCV自动执行服务器侧的顺序动作。信息接收函数的功能是接收来自传送设备类型指定的线路上的远程站信息。支持MODBUS/TCP协议等多个协议类型。
当客户机(HMI)与服务器(MP2300S)通信连接建立以后,就可以发送运动控制指令,实现人机交互。通过设置定时器(300ms),可以发送运动状态查询指令,实时查询运动平台的运动状态和位置信息。在整个系统运行过程中,需要保证通信始终处于连接状态。
向MP2300S发出控制指令请求时,只需向指定的寄存器写入指令码。指令码共12字节(6个字寄存器),格式如图6所示。

图6 指令码格式
当系统工作于自动模式(对应的控制码为0x00),开始运行(对应的控制指令为0x01)时,忽略轴位置控制信息。此时的MODBUS完整请求报文实例如表2所示。
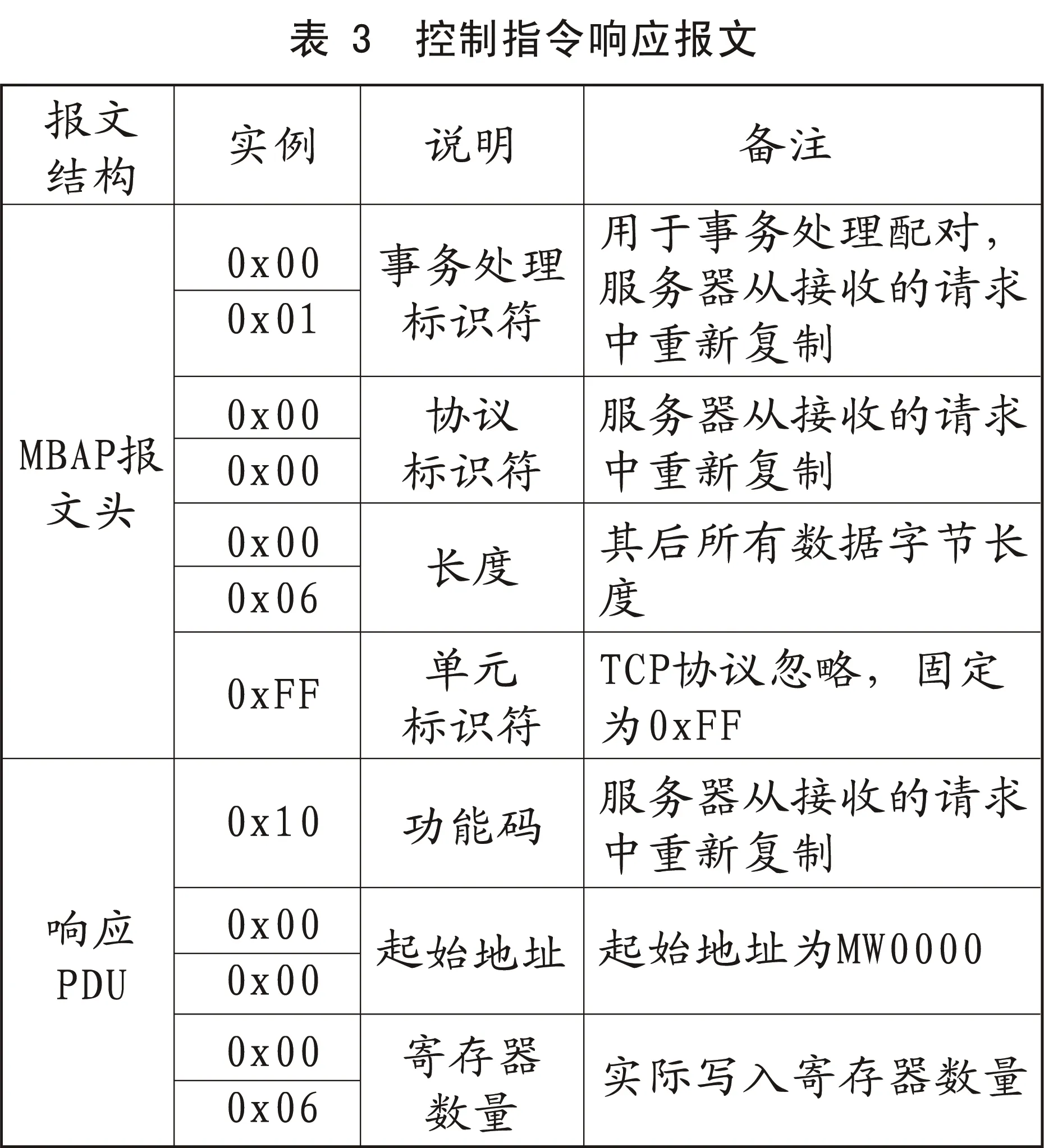
当MP2300S收到指令并正确响应时,返回的MODBUS/TCP响应报文格式如表3所示。
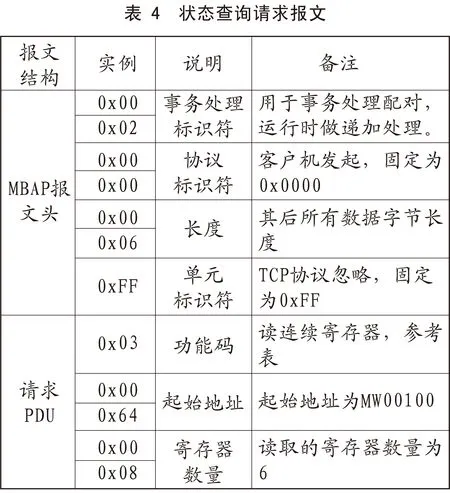
运动平台的运行状态和位置信息存储在以MW00100开始的8个连续寄存器中,其中MW00100-MW00103为两个直线电机的绝对位置(相对于原点)。查询状态和位置信息的MODBUS完整请求报文如表4所示。

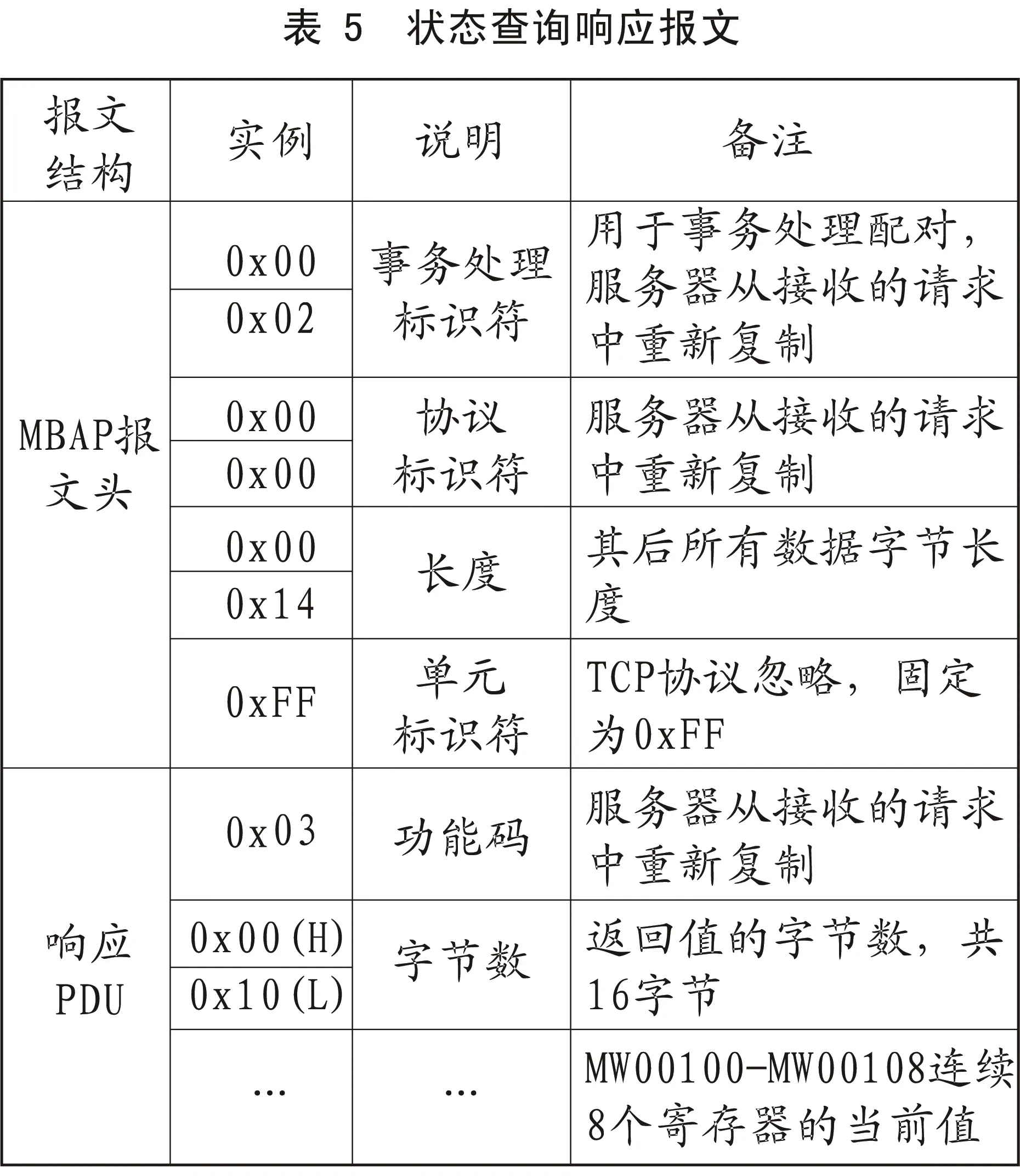
当MP2300S收到指令并正确响应时,会返回MW00100-MW00108所有寄存器的当前值。返回的MODBUS/TCP响应报文格式如表5所示。
4 结论
MODBUS/TCP协议作为中国工业网络的标准,是设计网络化控制系统的首选。直线电机作为一种新型进给传动系统,也得到越来越广泛的应用。将两者结合构建的基于MODBUS/TCP协议的多轴直线电机控制系统,既实现了现代工业控制系统的开放化、模块化、网络化要求,也满足了平板显示屏自动光学检测系统高定位精度和高速度的要求。在速度为1,运行距离200时的重复定位精度低于1。根据软件系统查询返回的位置信息,实际的定位精度不超过0.002/175000。同时由于以太网的使用,使系统实际具备了远程控制功能。
[1] 郑魁敬,高建设.运动控制技术及工程实践[M].北京:中国电力出版社,2009:10.
[2] 张连第.直线伺服电机在精密驱动与定位平台中的应用[J].机械研究与应用,2012(2):172—177.
[3] 孙培德.现代运动控制技术及其应用[M].北京:电子工业出版社,2012:8.
[4] GB/T 19582.3-2008,基于Modbus协议的工业自动化网络规范[S].
(责任编辑:文涵)
Faced with the trend of high-precision, high-efficiency, networking and modularization of the control system, a networking control system with multi-axis linear motor is designed. The advantages and methods of linear motor working at precision positioning platform are introduced, of which the implementation to construct networking control system based on MODBUS/TCP protocol is discussed specifically. HMI is realized through the Ethernet, which realizes the movement control and the real-time acquisition of the state information. Conclusion The sports platform is of high-precision and system stability, whose repeatability positioning accuracy is less than 1 .
Linear servomotors; MODBUS/TCP protocol; motion control
2016—01—13
国家重大科学仪器设备开发专项(2013YQ220749)
何小虎(1990—),男,湖北蕲春人,合肥工业大学仪器科学与光电工程学院硕士研究生,主要研究方向:精密测试技术及仪器。
TP29
A
1672—9536(2016)01—0020—05
