男性盆腔器官群实体模型的研制与实验研究
2016-04-11刘琬钰王兴继李盼姜杉杨志永
刘琬钰王兴继李盼姜杉杨志永
300072天津大学机械工程学院
男性盆腔器官群实体模型的研制与实验研究
刘琬钰王兴继李盼姜杉杨志永
300072天津大学机械工程学院
目的在前列腺穿刺手术中,穿刺针和组织器官的变形会对手术精度产生很大影响。因此深入的穿刺实验研究和大量的手术训练对于提高手术治疗效果十分必要。为了便于实验研究及手术训练的开展,笔者研制了男性盆腔器官群实体模型,并进行了相应的实验研究。方法根据人体核磁共振扫描图像进行盆腔器官群三维重建后,设计单体器官模具。采用一种新型聚乙烯醇(PVA)水凝胶,通过调整其成分配比及制作工艺得到满足不同组织生物力学特性的仿生材料,分别制作相应的单体器官模型;将单体器官依据人体解剖学结构进行装配,并模拟人体盆腔内环境;最后以制作完成的器官群模型进行穿刺力和穿刺变形实验。结果穿刺力实验数据表明此模型对器官群模型的力学特性符合实际手术中穿刺力的变化规律。穿刺变形实验中,通过超声图像可清晰显示出穿刺针和组织器官的形变,说明器官群模型具有较好的超声成像效果。结论男性盆腔器官群实体模型能够满足穿刺实验研究以及穿刺手术训练的需求,可为进一步提高穿刺手术的精度及穿刺手术的推广奠定基础。
穿刺手术;聚乙烯醇水凝胶;器官群;穿刺实验;生物力学特性
Fund program:National Natural Science Foundation of China(51175373)
0 引言
经皮穿刺手术是前列腺短距离放射治疗最常用的微创疗法之一[1]。在穿刺手术中作为目标器官的前列腺体由于受到周围器官的柔性约束,其位置并非固定,具有复杂的边界条件和变形机理。因此,前列腺体所处的盆腔器官群环境是影响手术精度的关键[2]。同时,术前训练、计量规划以及穿刺针与组织交互力学的实验研究对于提高手术的成功率及疗效亦是非常重要的。此外,因涉及伦理学等问题,使得相关实验研究的进行受到很大限制。因此对于盆腔器官群整体建模的研究具有更重要的实际意义。对此,国内外学者进行了大量的盆腔器官群建模及实验研究。
Misra等[2]建立了包含完整前列腺体及周围组织器官和相关结构的二维有限元模型,但虚拟模型相较于实体模型而言在手术训练、计量规划和实验研究等方面的实用性较差。因此,盆腔器官群实体模型的研制是十分急需的。盆腔器官群实体模型的研制是以医学影像技术为基础的。目前,随着三维重建技术的发展,将二维医学图像转换为三维模型已经能够实现[3]。国外已有很多学者进行了三维可视化人体的研究,运用医学影像三维重建技术重建了不同身体部位的三维模型[4-6]。在国内,邱国明和张绍祥等学者对男性盆底可视化技术进行了研究,并基于此对前列腺及其周围组织器官进行了三维建模[6];吴蓉[7]对经会阴穿刺前列腺解剖学做了深入的研究并进行了男性盆底的三维重建[7]。但由于各组织器官的仿生材料选择与制备、仿生材料的力学性能、各器官间约束结构设计、盆腔环境模拟等一系列问题尚待解决[8],因此高仿真的男性盆腔器官群实体模型目前并没有成熟的制作方法。
本研究以医学影像三维重建技术为基础,依据核磁共振图像进行了男性盆腔器官群的三维建模。选用一种新型的仿生材料——聚乙烯醇(polyvinyl alcohol,PVA)水凝胶作为盆腔内主要单体器官模型的浇铸材料,通过控制其化学成分的配比研制了符合不同器官生物力学特性的单体器官模型;之后根据人体解剖学结构进行器官群实体模型的整体搭建和盆腔内环境模拟;最后对搭建好的男性盆腔器官群实体模型进行了穿刺力学实验和变形实验。此研究工作为前列腺穿刺手术的进一步实验研究奠定了基础。
1 资料与方法
1.1 临床资料
男性盆腔器官群实体模型的研制目的在于能够在实验室条件下进行仿真前列腺穿刺手术实验研究及术前训练,因此研制的实体模型不仅要在外观结构和力学特性上与人体尽可能相近,其模型内环境还应接近人体真实的盆腔环境,并且需具有良好的核磁或超声成像效果,以获得可靠的实验数据或训练效果。
本研究采用的核磁共振(MR)图像数据取自1例56岁、体质量为77 kg的前列腺癌患者。患者对实验项目均知情同意,符合相关伦理学标准。
1.2 方法
1.2.1 仿生材料的选择与制备
仿生材料的选择直接决定了器官群模型的力学特性和实验效果。为了在实验室条件下尽可能实现人体不同组织的力学特异性,且考虑到实验中的可视效果,本课题组研制出一种新型仿生材料——PVA透明水凝胶[9]。(图1)

图1 新型聚乙烯醇透明水凝胶
该水凝胶是由PVA、去离子水、环氧氯丙烷、氢氧化钠、氯化钠和二甲基亚砜按一定比例和次序进行溶解,经数次冷冻、解冻后得到的透明的富含水分的固体仿生材料。采用荷兰飞利浦公司生产的XL-SERIES扫描电镜进行材料内部结构扫描实验。以改变原材料中的氯化钠含量为例,通过电镜扫描图像,可以看到不同化学成分配比下的水凝胶的内部结构具有明显的差异(图2);再以猪肾脏与特定配比水凝胶的截面电镜扫描图为例进行对比(图3),发现两者内部结构非常相似,说明通过控制化学成分的比例可得到与特定生物组织内部结构相近的仿生水凝胶。进而对比猪肾脏与特定成分水凝胶在穿刺过程中的力学特性(图4),可看出两组穿刺力的大小及变化规律很接近,说明这种成分配比下的PVA水凝胶与猪肾脏的生物力学特性十分吻合,可以将其应用于实验中。经过多次实验分析,证明这种新型PVA水凝胶能在实验室条件下通过控制成分配比得到满足不同单体器官力学特性的仿生材料;并且该水凝胶是富含水分的透明固体,具有很好的超声及核磁成像效果,在实验中亦能很好地观察进针过程,从而满足盆腔内各单体器官模型的制作要求。

图2 不同成分配比下的PVA水凝胶截面电镜扫描图(×2 000)

图3 猪肾脏与特定配比PVA水凝胶截面电镜扫描图(×1 000)
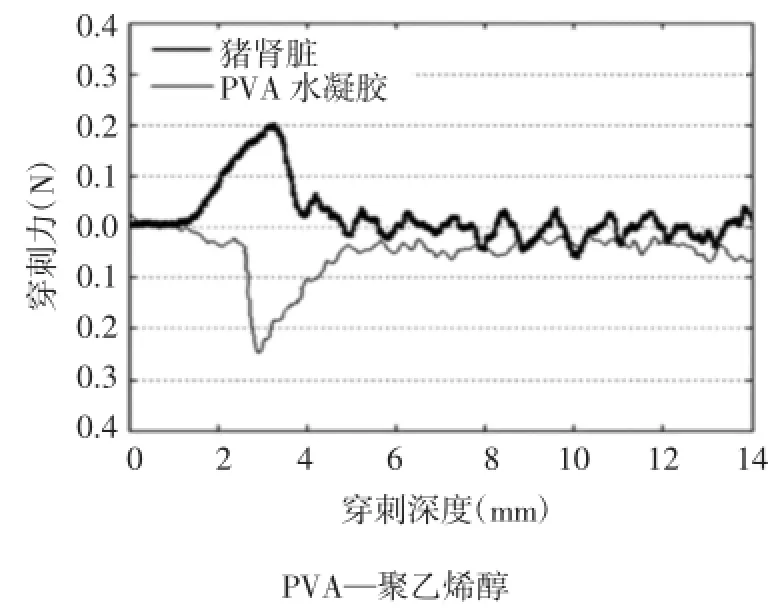
图4 猪肾脏与特定配比PVA水凝胶穿刺力对比图
1.2.2 器官群实体模型的制作
Yi曾采用CT断层扫描图像对男性盆腔内器官进行了三维重建,这里采用辨识精度更高的核磁共振图像进行盆腔器官群三维重建[6]。本研究采用的MR图像数据除前列腺体外,仅选择膀胱、直肠、闭孔内肌、肛提肌这些在穿刺手术中对前列腺位置及形变产生较大影响的器官作为三维重建和优化处理的对象。单体器官的浇铸模具采用3D打印结合激光烧结快速成型技术制作完成。前列腺及膀胱实体模型浇铸模具如图5。

图5 前列腺及膀胱实体模型浇铸模具
单体器官的材料选择需着重考虑材料的仿生力学性能。通过调整PVA水凝胶的成分配比及制作工艺,得到满足盆腔内不同组织器官力学特性的水凝胶,分别进行盆腔内单体器官的制作。图6为制作完成的前列腺和膀胱单体模型。以人体真实解剖结构为依据,将各单体器官逐一装配在骨盆模型内(图7)。

图6 膀胱和前列腺实体模型

图7 装配完成的盆腔器官群实体模型
为模拟真实人体内环境,同时便于进行实验研究,将器官群模型放在有机玻璃箱体中,并在箱体内填充琼脂糖。由于琼脂糖在常温下为透明固体,且其弹性模量很小,因此能达到提供器官群支撑力的作用且不影响穿刺力。箱体前端面留有开口,并在开口处粘附一层硅胶薄膜以模拟人体皮肤,可达到模拟会阴经皮穿刺手术的效果。完整的男性盆腔器官群实体模型如图8所示。

图8 男性盆腔器官群实体模型
2 结果与讨论
穿刺手术中变化的穿刺力和组织形变是影响穿刺精度的两个重要因素。笔者通过基于搭建好的男性盆腔器官群实体模型进行柔性针穿刺实验,包括穿刺力实验和穿刺变形实验,以验证模型的科学性和实用性。

图9 穿刺力实验照片及穿刺力数据图
2.1 穿刺力实验
在没有实时图像导航的手术条件下,穿刺力的变化是医生在手术过程中能够获取的重要反馈信息。穿刺过程主要分为4个阶段:针尖在皮层穿刺,针尖进入盆腔内部,针尖接触到前列腺表面,针尖刺入前列腺体。采用美国ATI公司的Nano-17六维力传感器来采集实验过程中穿刺针的受力数据,便于后期分析。
实验得到穿刺针经由硅橡胶薄膜和琼脂糖刺入前列腺模型的穿刺力(图9)。图中所示,穿刺过程自A点时刻后开始,穿刺针与硅橡胶薄膜接触,AB段穿刺力随时间持续增大,硅橡胶薄膜变形也逐渐增大;B点时刻为刺破薄膜瞬间,薄膜变形达临界点,针尖受力到达极大值,之后穿刺力迅速减小;BC段为刺破薄膜后穿刺针在盆腔模型内部琼脂糖中继续进行穿刺,其进针阻力很小;自C点时刻起穿刺针开始与前列腺接触,CD段穿刺力随着进针运动逐渐增加,前列腺体变形逐渐增大,在D点时刻变形达到最大值,此时穿刺力也达到另一个极大值,随后刺破前列腺,穿刺力急剧减小;EF段为针尖在前列腺中行进时受力,随着进针深度增加针尖受到的阻力也逐渐增大;在F点时刻进针运动停止,针尖受力再次急剧下降。由图9可看出,该实验得到的穿刺力变化曲线符合手术过程中的穿刺力变化规律[10]。

图10 超声探测下柔性针穿刺过程与前列腺变形
2.2 穿刺变形实验
穿刺变形实验采用DP-50全数字便携式超声诊断系统观测盆腔器官群在穿刺实验中的变形情况。实验过程中将超声探头垂直于进针方向由夹具加持在骨盆耻骨联合下方,扫描面为穿刺针与超声探头构成的平面。穿刺过程中的超声影像如图10所示。从图中可清晰观察到穿刺针的进针深度以及前列腺体的变形情况。实验结果证明,盆腔器官群实体模型在超声导航穿刺实验中能够获得较好的图像反馈效果。
3 结论
本研究以三维重建技术为基础,采用新型的仿生材料PVA水凝胶,进行了包括盆腔器官群三维建模、单体器官模型制备、器官群搭建及盆腔内环境模拟等技术的完整的男性盆腔器官群实体模型研制。经穿刺力实验和穿刺变形实验证实,此模型较真实地模拟了穿刺手术中的力学机理,且能获得完备的力学数据和图像数据。对比实际手术经验,可认为笔者所研制的盆腔器官群实体模型具有较好的实验效果,能够较真实地模拟实际的人体穿刺手术过程,为前列腺穿刺手术的实验研究及手术训练奠定了基础。
利益冲突无
[1]李忠勇,高惠波,金小海,等.近距离治疗肿瘤的放射性粒子研究进展[J].同位素,2011,24(2):118-123.
Li ZY,Gao HB,Jin XH,et al.Research progress in radioactive seed for brachytherap[J].J Isot,2011,24(2):118-123.
[2]Misra S,Macura KJ,Ramesh KT,et al.The importance of organ geometryandboundaryconstraintsforplanningofmedical interventions[J].Med Eng Phys,2009,31(2):195-206.DOI:10.1016/ j.medengphy.2008.08.002.
Xu MS.Research of medical image three-dimensional reconstruction technology[D].Wuhan:Wuhan University of Technology,2012.DOI: 10.7666/d.y2099067.
[4]Venuti JM,Imielinska C,Molholt P.New views of male pelvic anatomy:role of computer-generated 3D images[J].Clin Anat,2004, 17(3):261-271.DOI:10.1002/ca.10233.
[5]Sergovich A,Johnson M,Wilson TD.Explorable three-dimensional digital model of the female pelvis,pelvic contents,and perineum for anatomical education[J].Anat Sci Educ,2010,3(3):127-133.DOI: 10.1002/ase.135.
[6]Wu Y,Zhang SX,Luo N,et al.Creation of the digital threedimensional model of the prostate and its adjacent structures based on Chinese visible human[J].Surg Radiol Anat,2010,32(7):629-635.DOI:10.1007/s00276-010-0625-5.
[7]吴蓉.经会阴前列腺穿刺术解剖学研究及男性盆底三维重建[D].上海:上海交通大学,2008.
Wu R.Anatomical study on transperineal prostate puncture and three-dimensional reconstruction for male pelvic floor[D].Shanghai: Shanghai Jiao Tong University,2008.
[8]Famaey N,Vander Sloten J.Soft tissue modelling for applications in virtual surgery and surgical robotics[J].Comput Methods Biomech Biomed Engin,2008,11(4):351-366.DOI:10.1080/1025584080202 0412.
[9]Jiang S,Su ZL,Wang XJ,et al.Development of a new tissueequivalent material applied to optimizing surgical accuracy[J].Mater Sci Eng C Mater Biol Appl,2013,33(7):3768-3774.DOI:10.1016/j. msec.2013.05.001.
[10]Glozman D,Shoham M.Image-guided robotic flexible needle steering[J].IEEE T Robot,2007,23(3):459-467.DOI:10.1109/TRO. 2007.898972.
Development and experimental research on the physical model of male pelvic organ group
Liu Wanyu, Wang Xingji,Li Pan,Jiang Shan,Yang Zhiyong
School of Mechanical Engineering,Tianjin University,Tianjin 300072,China
ObjectiveTo develop the physical model of male pelvic organ group and conduct corresponding prostate puncture experiments.Because sufficient research and plenty of surgical training is very important for improving the surgical treatment effect of prostate puncture surgery,in which the deformation of needle and tissue has significant influences on surgical precision.MethodsBased on the magnetic resonance images,the 3D reconstruction of human pelvic organs group was performed,and then the monomer organ moulds were designed.The monomer organ models were made by a new type of polyvinyl alcohol(PVA)hydrogel which is a biomimetic material and can simulate biomechanical properties of different tissues by adjusting the proportion of components.The monomer organ models were assembled to simulate the internal environment of pelvic cavity based on the human anatomical structure,and the experiments of insertion force and deformation were conducted.ResultsThe results of insertion force experiments indicated that the mechanical properties of the proposed model of pelvic organ group were coincident with the force variation in real surgury.During the insertion deformation experiments,the deformation of needle and organs could be clearly observed in the ultrasound images,which indicates that the pelvic organ group has good ultrasonography compatibility.ConclusionsThe proposed physical model of male pelvic organ group can meet the requirements of experiment research and surgical training of prostate puncture,which provides foundation for improving precision and popularization of puncture surgery.
Puncture surgery;Polyvinyl alcohol hydrogel;Organ group;Puncture experiment; Biomechanical characteristic
Jiang Shan,Email:shanjmri@tju.edu.cn
国家自然科学基金(51175373)
梅生.医学图像三维重建技术的研究[D].武汉:武汉理工大学,2012.
10.7666/d.y2099067.
2016-09-25)
姜杉,Email:shanjmri@tju.edu.cn
DOI:10.3760/cma.j.issn.1673-4181.2016.06.006