Fuzzy-PID技术在汽轮机切换阀上的应用
2016-04-08江金鱼徐永远
江金鱼,袁 焕,黄 磊,徐永远
(1湖北理工学院 机电工程学院,湖北 黄石 435003;2武汉胜赛斯燃气测控系统有限公司,湖北 武汉 430051)
Fuzzy-PID技术在汽轮机切换阀上的应用
江金鱼1,袁焕1,黄磊1,徐永远2
(1湖北理工学院 机电工程学院,湖北 黄石 435003;2武汉胜赛斯燃气测控系统有限公司,湖北 武汉 430051)
摘要:现有汽轮机切换阀控制系统一般都建立在经典PID控制理论的基础上,此类系统能够满足一般场合的使用需求,但是在一些负荷量大,要求实时性、稳定性高的场合这套系统就很难满足要求。以某公司的300 WM 汽轮机组为研究对象,构建系统控制原理图,运用模糊推理建立系统模糊控制规则表,利用PLC模块实时采集切换阀阀门开度值,实时调整伺服阀PID参数,以实现对汽轮机切换阀的快速、稳定控制。先利用MATLAB(Simulink)进行了动态仿真及实际运行测试,后又在切换阀上实际运行测试,2种方法都表明Fuzzy-PID的控制效果要比经典PID控制效果理想很多。
关键词:汽轮机切换阀;阀门开度控制系统; Fuzzy-PID;仿真
汽轮机切换阀用于调节汽轮机转速和所处管道内流体的流量、压力或速度,并在紧急时刻快速关闭主蒸汽进汽,保护汽轮机组。现代大、中型发电厂组中汽轮机多采用DEH控制系统,各进汽阀门是由电信号控制、高压油动机驱动。其中阀门开度控制是DEH系统的重要功能,但目前多数阀门存在控制系统复杂、控制精度不高、稳定速度较慢等不足,系统仍需要改进和完善。针对现有300 WM汽轮机组中切换阀阀门控制系统的不足[1-2],开发一套汽轮机切换阀开度智能控制系统具有较强的实用价值和推广意义。
1系统控制原理
通过分析汽轮机切换阀工作过程[3-4],建立了如图1所示的系统控制原理图,系统以PLC控制模块为控制中心,当PLC控制模块接收到本地触摸屏控制或远程DCS控制的目标值(汽轮机实际需要的流量值和压力值)后,通过内部程序计算会向伺服阀输出一个“控制输出”的位移信号,该信号值决定了伺服阀根据给定信号调节自身开度,使伺服油缸内的液压油维持一相对压力,该压力可使执行阀杆处于一个对应的行程位置,安装在执行阀杆上的一对行程传感器采集对应的互补位移信号,经变送器反馈给PLC控制器,由PLC控制器将反馈信号值与输出位移值进行实时比较,计算偏差量及偏差率,再应用智能算法确定新的位移调整量,输出给伺服阀,使伺服油缸的液压油驱动执行阀杆,使调节阀进一步向目标值靠近,同时行程传感器也不停地将执行阀杆的位置信息反馈到PLC控制器内,如此多次调整输出位移值,使调节阀控制的管道流量与压力最终与本地或远程的目标值一致。根据汽轮机实际流量值和压力值允许的波动范围分析,要求PLC控制器控制的位移输出值与反馈值偏差率在0.08%以内,实现阀门的实时智能控制[5]。

2模糊PID控制
切换阀开度智能控制系统是以执行阀杆的位置信息作为反馈信号,但其受进入两缸的油液流量、压力、温度,阀门类型等参数影响,切换阀控制系统机理较为复杂,多采用PID调节控制,常规PID适应性较差,多数效果不理想,在参数变化或外界干扰的情况下,系统稳定性和鲁棒性变差,无法实现实时智能控制。
根据模糊PID控制理论[6-7],本控制系统在采用PID调节器的基础上,应用模糊集合理论,将PLC控制器输出值与采样的反馈值转变成偏差量及偏差变化量,并模糊化。先确定各控制量的模糊值,经推理机制处理,再进行反模糊,得到对应情况下的PID参数值,实现PID参数的实时调整,从而快速有效地控制阀门状态,减小误差。300 WM汽轮机组中切换阀阀门控制系统的模糊PID控制过程如图2所示。
模糊控制器的数字PID表达式如下:

e=In(x)-Out(x);
ec=e(n)-e(n-1)。
其中,e为偏差;ec为偏差变化量;In(x)为输入值;Out(x)输出值;e(n)为第n次偏差;e(n-1)为第n-1偏差。u(n)对应第n次偏差时模糊自适应PID控制器的输出,KP为比例系数,它影响系统的响应速度和精度;KI为积分作用系数,它影响系统的稳态精度;KD为微分作用系数,它影响系统的动态性能。
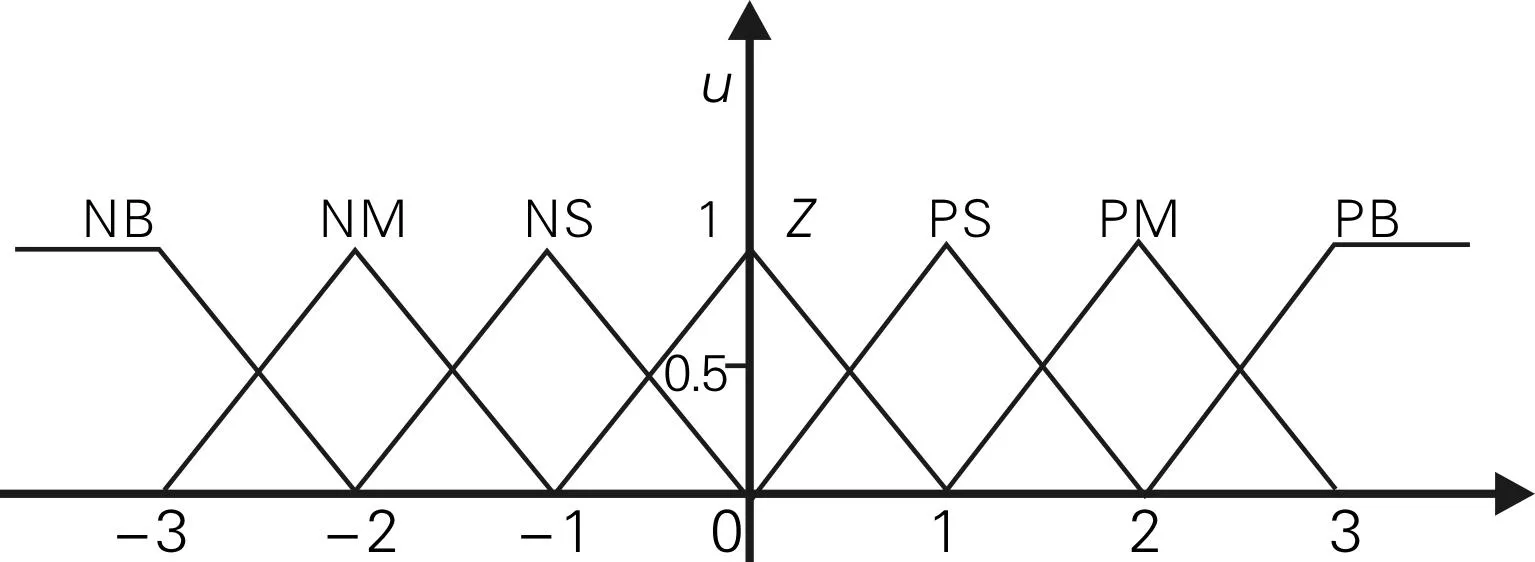
模糊控制以偏差e和偏差变化量ec作为模糊因子,通过模糊推理后即可得出KP、KI、KD3个参数,再将这些参数代入上述表达式中即可计算出PID控制器的输出值u,从而使PLC输出对应信号驱动液压控制系统,使阀门实际行程与控制指令一致。输入对应的模糊集E和EC都是{NB,NM,NS,Z0,PS,PM,PB},输出对应的模糊集KP、KI、KD都是{NB,NM,NS,0,PS,PM,PB},分别代表:负大,负中,负小,(正)零,正大,正中,正小。输入E和EC的论域取值都为[-3,3],输出的论域取值:KP为[-1.2,1.2],KI为[-0.12,0.12],KD为[-6,6], 比例因子根据现场调试来定。模糊子集的隶属度函数选为三角隶属度函数。输入输出变量的隶属度函数曲线如图3所示。
模糊控制规则库由一系列“IF-THEN”型的模糊条件句所构成[8],E和EC都是由7个状态词汇来描述的输入量,共有49条输入、输出控制规则,如下所示:
if E is NB and EC is NB thenKPis PB,KIis NB andKDis NS;
……
根据工程设计的经验,建立的KP、KI、KD的模糊控制规则如表1所示[9-10]:
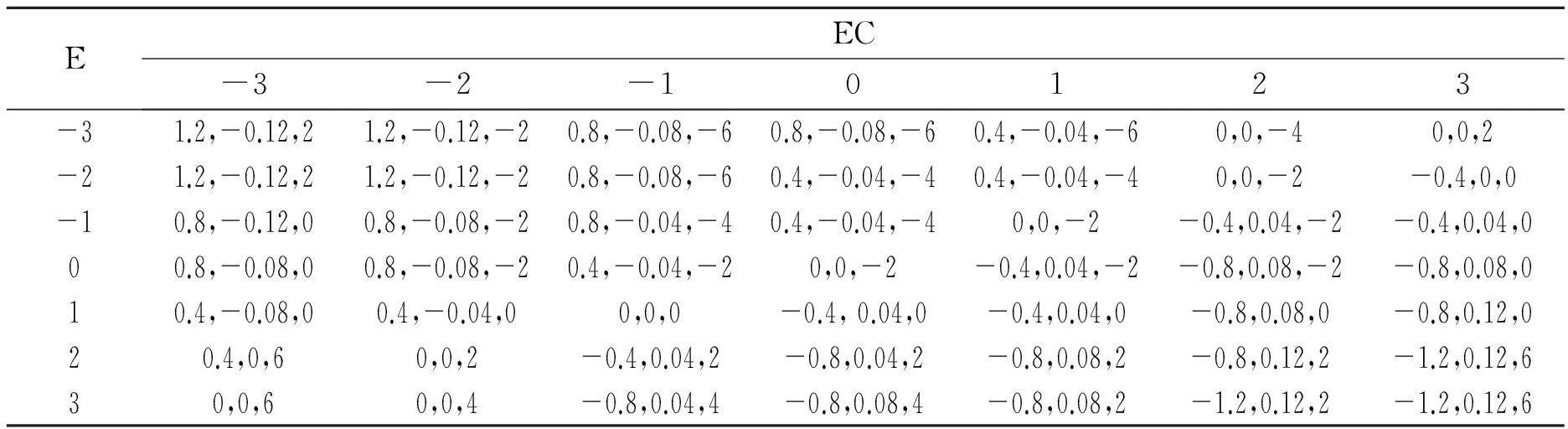
表1 KP、KI、KD控制规则
利用最大隶属度法进行清晰化运算即可得出在相应论域中隶属度最大的元素,即输出控制的清晰值。
3阀门控制系统中模糊PID控制仿真及实际应用
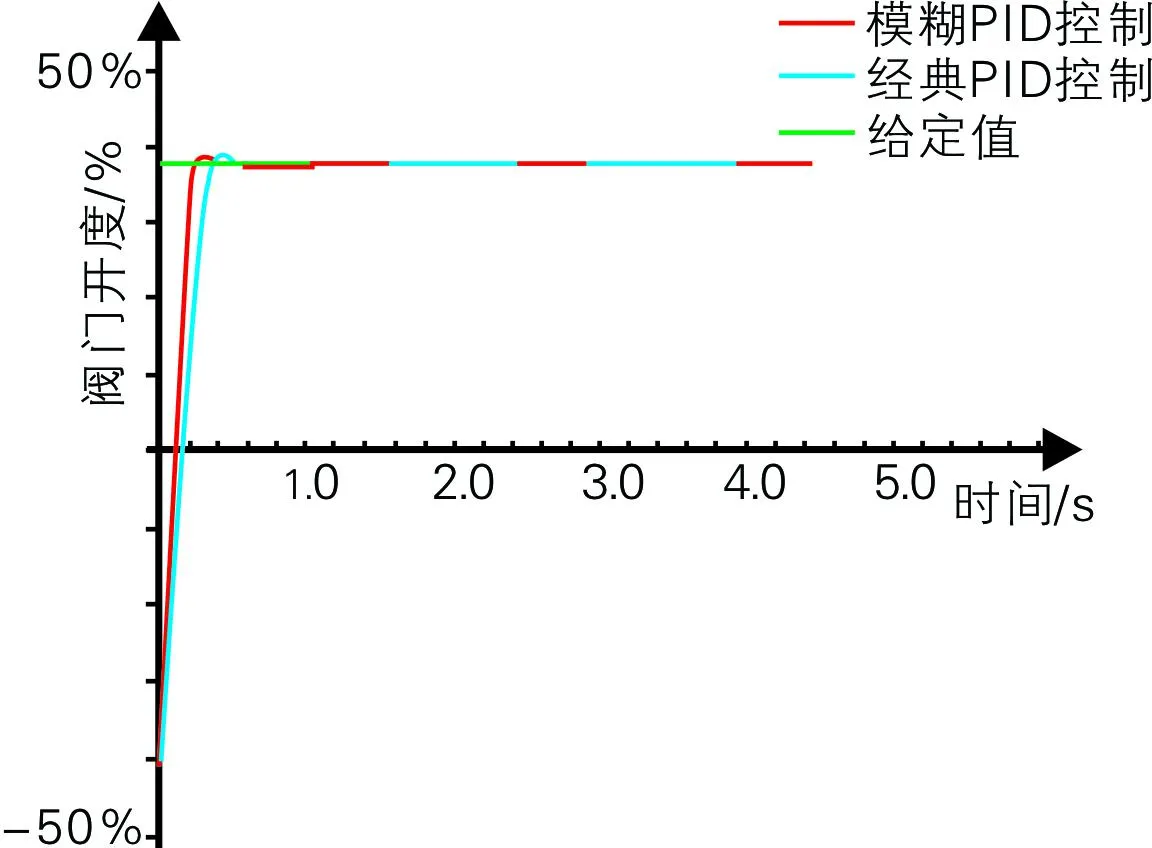
根据上述系统模型及硬件参数,利用MATLAB软件中的Smulink软件包,实现PID控制及模糊PID控制系统的建立和动态仿真[11]。阀门控制系统完成位置检测数据的变换,将A/D转换获得的信号经过满量程修正之后换算成-50%~50%的开度信号。当阀门开度设定为38.0%时,常规PID控制系统和模糊PID控制系统的阶跃响应曲线如图4所示。由仿真结果可以看出:在允许的误差带范围内,经典PID控制的调节时间为0.46 s,超调为16%,振动次数为2次;模糊PID控制上升时间为0.25 s,超调为3%,振动次数为1次。仿真结果表明采用模糊控制策略,系统的稳定性增加,动态性能得到改善,可以满足汽轮机长期安全、稳定工作的要求。
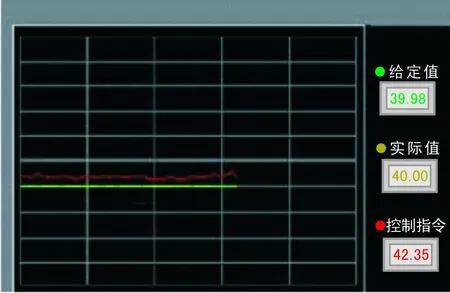
汽轮机切换阀阀门开度控制系统在实际运行一段时间后,执行阀杆位置的实时曲线如图5所示,红线为DCS远程控制器的输出指令,执行阀杆实际行程值(黄线)与控制系统给定行程值(绿线)相吻合,位置偏差率在0.08%以内,满足控制系统要求。
4结束语
本套汽轮机切换阀开度智能控制系统依据工程经验设计了PID参数依据误差和误差变化率输入的模糊控制规则表;从阀门开度控制系统的响应曲线和执行阀杆位置实时控制效果来看,模糊PID控制优于PID控制。但系统模糊控制规则表的建立依赖于人的经验,需要根据现场实际情况不断调试优化。
参 考 文 献
[1]吴剑恒,俞金树,何宏舟,等.6MW抽凝汽轮机组DCS+DEH改造及其效果[J].沈阳工程学院学报(自然科学版),2013,9(4):305-310.
[2]LI Xiaoxiao,Wang Xuanyin,Li Fushang.Research on new type of fast-opening mechanism in steam turbine regulating system and optimization of operation tactic[J].Journal of Zhejiang University SCIENCE A,2008,9(5):633-639.
[3]刘延俊,孔鹏,杨振华.大流量混合煤气调节阀稳压伺服控制系统研究[J].机床与液压, 2010,38(15):17-23.
[4]孙玉芬,王再英.汽轮机DEH系统建模及仿真研究[J].计算机仿真,2013,30(9):126-130.
[5]江金鱼,杨春杰,袁焕.一种基于调节阀的智能控制系统:中国,ZL201420331610.5[P].2014-10-15.
[6]M Güzelkaya,I Eksin,E Yesil.Self-tuning of PID-type fuzzy logic controller coefficients via relative rate observer[J].Engineering Application of Artificial Intelligence,2003,16(3):227-236.
[7]周继春.基于模糊控制的电厂蒸汽锅炉自动控制系统研究[J].大众科技,2013,15(165):101-103.
[8]曾光奇,胡均安,王东,等.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2006:87-96.
[9]李兵.模糊PID液位控制系统的设计与实现[J].合肥工业大学学报,2006,29(11):1370-1374.
[10]王右,王景成.基于差分进化的模糊PID复合控制在汽轮机转速调节系统中的应用[J].东南大学学报(自然科学版),2011,41(z1):84-87.
[11]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008:13-37.
(责任编辑黄小荣)
Application of Fuzzy-PID Technology in Steam Turbine Switch Valve Control System
JiangJinyu1,YuanHuan1,HuangLei1,XuYongyuan2
(1School of Mechanical and Electronic Engineering,Hubei Polytechnic University,Huangshi Hubei 435003;2Wuhan Seth Gas Control System Co.,Ltd.Wuhan Hubei 430051)
Abstract:The steam turbine switch valve control system is generally based on the classical PID control theory,which can meet with the demands on some occasions.However,in some situation which requires high load,real-time and high reliability,the available system can not achieve the purpose.Taking the 300 wm steam turbine in a certain company as the research object,the system control principle diagram is constructed and system fuzzy control rules table is built based on Fuzzy deduction,and the switch valve opening degree is collected with the PLC module.The servo valve parameter is adjusted to realize the quick and stable control of the switch valve of the steam turbine.The dynamic simulation and practical operation test have been done with MATLAB (Simulink) and later the practical operation test is done on switch valve.The results of the two methods show that the control effect of fuzzy-PID is better than that of the classical PID.
Key words:control valve of steam turbine;valve opening control system;Fuzzy-PID;simulation
中图分类号:TP273
文献标识码:A
文章编号:2095-4565(2016)01-0001-03
doi:10.3969/j.issn.2095-4565.2016.01.001
作者简介:江金鱼,讲师,硕士。
收稿日期:2015-09-22
