基于Solidworks创建的机械手的SimMechanics仿真
2016-04-07李成浩
李成浩
(苏州高博软件技术职业学院,苏州 215163)
基于Solidworks创建的机械手的SimMechanics仿真
李成浩
(苏州高博软件技术职业学院,苏州 215163)
通过Solidworks为三维建模软件,快速建立了三指机械手三维实体模型。阐述CAD模型建立后,导入SimMechanics仿真的方法。通过机械手在SimMechanics中的仿真,得到其仿真动画,研究其运动学特性。仿真流程的建立将为后续轨迹优化算法设计、动力学分析研究,提供仿真和验证途径。
机械手 运动仿真 Solidworks SimMechanics
引言
20世纪后半期,机械手设计开始出现,并作为机器人领域的热门研究,逐渐取得了巨大进步和显著进展。伴随着工业及其他受益于机械手研究和设计的产业要求的进一步提高和社会对机械手功能的更高需求,机械手功能越来越完善,同时也造成机械手系统的复杂度提高和研究难度的上升。
当前,仿真技术已成功应用于航空航天、信息、生产制造、材料、军事、经济等众多领域。随着研究对象的规模日益扩大,结构日益复杂,基于计算机的仿真技术不仅有助于提高设计效率,缩短开发周期,还不受环境气候等因素的限制,且在保证安全、节省开支、提高质量等方面优势明显。
在机械工程领域,大型仿真软件如ADAMS、ANSYS在各自的细分领域里都有专长。而像传统的CAD制图软件,如Pro/E、Solidworks等,也在原有功能上添加了多种仿真功能。SimMechanics(自MATLAB R2016a版本后更名为Multibody)是MATLAB软件内的一个机构系统模块集,可以对各种运动副连接的刚体进行建模与仿真,实现对机构系统动态性能分析的目的。利用此工具进行机械手的分析不需要建立复杂的数学模型和编程,依托MATLAB强大的数据处理能力,可实现实时分析和机构运动状态的模拟显示。
1 Solidworks建立三指机械手模型
机械手有很多实体零件组成。如图1所示,SimMechanics虽然可以通过Body Elements子模块组中的Solid模块进行设计组建,但与用Solidworks设计相比,操作难度高。特别是在零件装配过程中,Solidworks凭借强大的图形拖拽及可视化能力,在设计效率上具有明显优势。

图1 SimMechanics模块组
文中仿真的机械手以Barrett Technology公司BH8系列的BarrettHand机械手作为参考。该机械手有三个手指,如图2、图3所示。手指1近指节关节固定,而手指2、3近指关节可绕Z轴旋转一定角度;三个手指的中指节和远指节都为旋转副关节,可绕X轴旋转。

图2 机械手三视图

图3 机械手Solidworks三维装配图
2 Solidworks装配体导入SimMechanics
要将Solidworks装配体导入SimMechanics,该过程依赖专用的XML文件。此文件存储着装配体的详细模型描述数据。SimMechanics通过读取XML文件,重新生成装配体模型。
整个转换过程分为两步,即导出与导入,见图4。导出过程中,将装配体转变成XML文件和STEP/STL文件,后者包含了装配体零件的几何性质。导入过程中,把XML文件和STEP/STL文件转化成SLX文件和一个数据文件。此时,SimMechanics将装配体的所有特性都转换完成。

图4 Solidworks装配体转换流程图
需要说明的是,各个零件之间的装配关系既可以在Solidworks中完成,也可以把各个零件另存为STEP或者STL文件后,在SimMechanics中进行装配。两者相比,前者只需要相连零件间的约束关系,就可实现装配,无需零件间的基础坐标系的变换,因而不易出错。图5是在Solidworks中装配好后转换的三指机械手SimMechanics模型。
3 SimMechanics仿真
机械手SimMechanics模型建立后,仍需要对模块的参数进行一定修改,并且在各关节(Joint)处引入驱动模块,才能对所建模型进行运动学仿真。
3.1 机械手仿真运动过程
图6展示了机械手的整个运动过程。初始状态时,机械手三指摊开;在0~3s内,手指2和3绕着各自的近指节关节旋转180°,至三指并拢,如图6(c)所示;3~6s,三手指同时向掌心弯曲,做抓取状;6~10s,三手指重新张开。
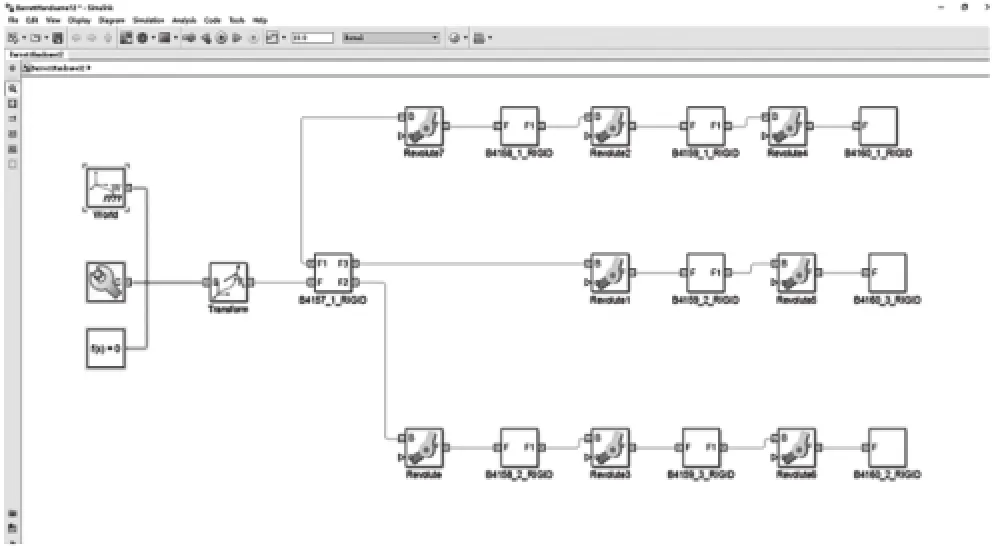
图5 三指机械手的SimMechanics模型
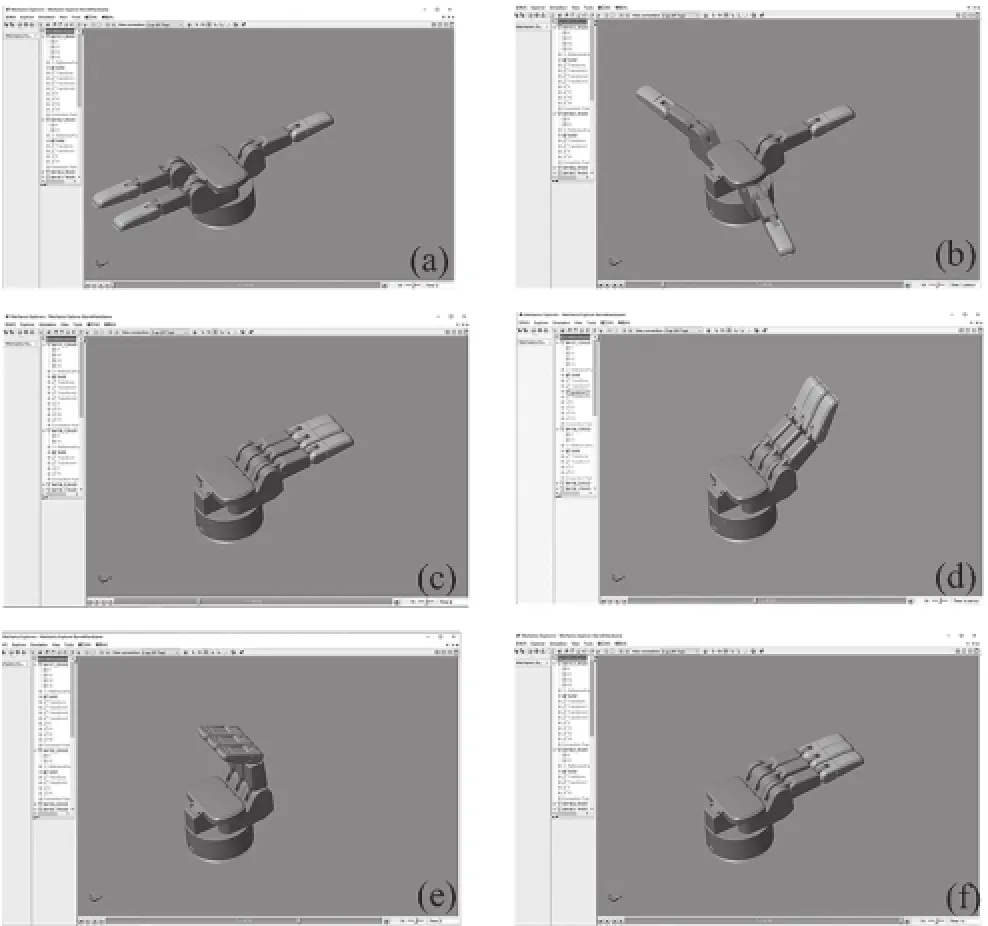
图6 可视化机械手运动仿真过程
3.2 仿真结果
此过程中,手指1的近指节固定不动,该指其余关节可动;手指2和手指3运动状态相同,所以只选取手指2作为研究对象。每个手指关节都读取旋转角度、角速度、角加速度三个参数,共五组,如图7所示。
由于指关节运动时都为匀速,所以旋转角度都为斜坡信号;当关节由静止变成匀速运动时,该关节的角加速度为一个脉冲信号。
4 小结
(1)利用SimMechanics可对机械手的运动进行数据化分析,运动过程也是可视化的。
(2)文中仿真的对象为三指机械手,在结构上具有一定的复杂度,直接在SimMechanics中建立三维模型有一定难度。运用优秀的三维CAD制图软件,如Solidworks,可快速、高效地设计出三维实体,再把三维实体通过接口导入SimMechanics,进行仿真优化。

图7 五组指关节运动状态
(3)整个仿真流程的建立,将为后续优化轨迹算法设计、动力学分析研究,提供仿真和验证途径。
[1]王行仁.建模与仿真技术的发展和应用[J].机械制造与自动化,2010,(1):1-6,45.
[2]杨树川,邵金龙,杨术明,等.基于Solidworks & SimMechanics的机构运动分析与仿真[J].河北工业科技,2011,(4):221-225.
[3]胡峰.一种轻型高速并联机械手的设计与仿真研究[D].成都:电子科技大学,2013.
[4]朱琪,吴雁,何玉安.基于SimMechanics的四自由度机械手控制系统机液耦合仿真[J].机床与液压,2015,(3):16-19.
SimMechanics Simulation of Manipulator based on Solidworks
LI Chenghao
(Suzhou Gao Bo software technology, Career Academy, Suzhou 215163)
The 3D solid model of the three finger manipulator was built by using Solidworks as the 3D modeling software. After the CAD model is established, the method of SimMechanics simulation is introduced. Through the simulation of manipulator in SimMechanics, the simulation animation is obtained, and its kinematics characteristics are studied. The establishment of simulation process will provide a simulation and verification approach for the design and dynamic analysis of the following trajectory optimization algorithms.
robot, motion simulation, Solidworks, SimMechanics
