具有攻击角约束的无抖振滑模导引律设计
2016-04-06肖圣龙海军驻广州广船公司军事代表室150001
肖圣龙(海军驻广州广船公司军事代表室,150001)
具有攻击角约束的无抖振滑模导引律设计
肖圣龙
(海军驻广州广船公司军事代表室,150001)
摘要:为了提高拦截器弹头的杀伤力,带攻击角度约束的导引律一直是学术界研究的热点。因此,制导律的设计既要保证较小的脱靶量又要保证以相应的攻击角度打击目标,目前已有很多的控制方法应用在拦截器制导设计中,包括最优制导律,滑模制导律,PN制导律,等等。我们知道滑模控制方法对外界扰动和参数不确定性有较好的鲁棒性,但是滑模控制的抖振缺陷普遍存在于传统的线性滑模和终端滑模中。因此,本文提出了一种新的无抖振终端滑模控制方法用于制导律的设计中,该方法不仅对外界有界扰动有较好的鲁棒性,还有效的消除了抖振的产生。最后数字仿真验证了该方法的有效性。
关键词:制导律;滑模控制;无抖振
目前减弱抖振的方法一般有两种方法,常用的方法是用饱和函数代替符号函数,但是这种方法会使滑模的对匹配的外界扰动不变性彻底失去,对抑制不匹配的外界扰动性也会有所降低。另一种方法是设计扰动观测器来观测未知的扰动项,然后将估计值作为补偿项,减小符号项在控制器中的比重,例如文献[1],这样可以有效的降低抖振现象。但是前两种方法都有不能彻底消除抖振,只能减弱抖振的发生。
1 拦截运动学方程
图1为拦截器与目标的二维拦截几何示意图,其中O—X—Y为笛卡尔惯性坐标系,将导弹和目标视为质点,他们之间的连线称为视线(line of sight,LOS)。我们记导弹和目标分别为M 和T ,VM和VT分别为导弹和目标的速度,am和at分别为导弹和目标的法向加速度,γm和γt分别为导弹和目标的飞行路径角,λ为弹目的视线角,r记为弹目距离。
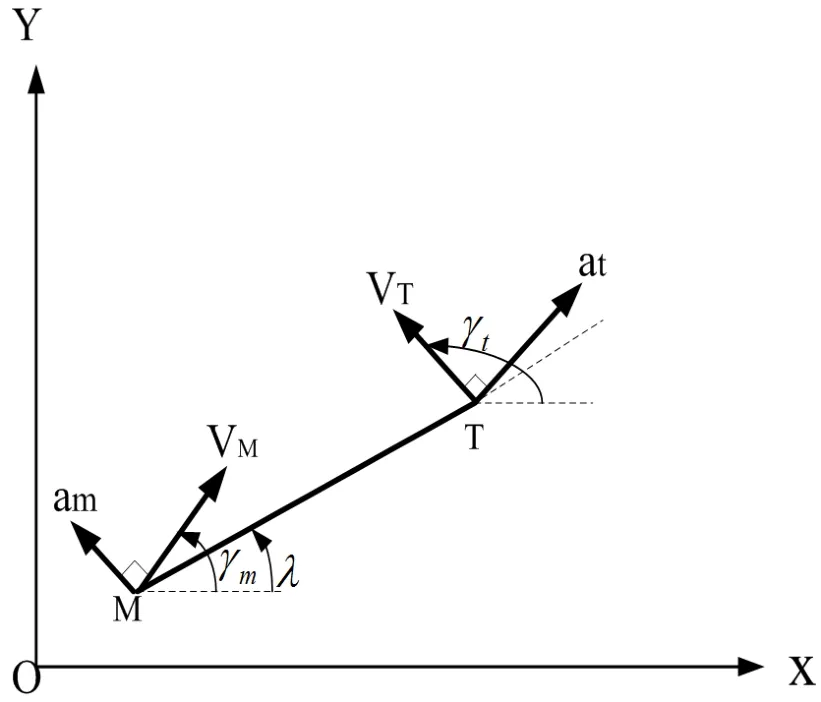
图1 导弹—目标拦截几何示意图
忽略重力的影响并假设导弹和目标速度变化不大,弹目运动学方程在关于导弹极坐标系(r, λ)下可表示为:
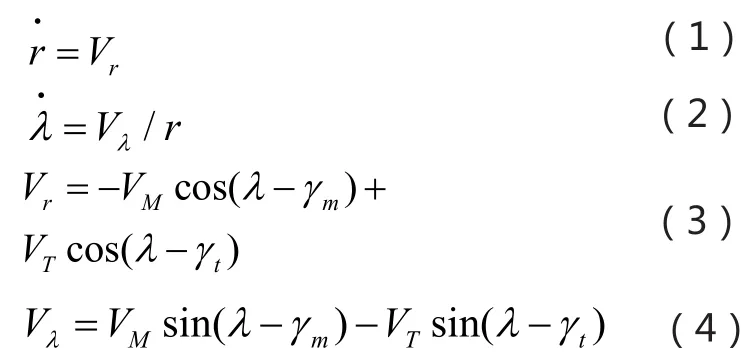
其中Vr和Vλ为弹目相对速度在视线的切向和法向分量。

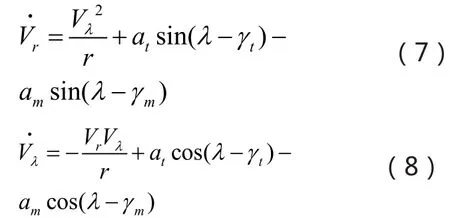
对式(3)、(4)求导得:

r( t0)记为弹目初始距离,t0为初始时刻。
2 制导律设计目标
记λd为期望的视线角常量,在导弹追踪目标过程中视线角速率保持零值,才能保证导弹以零脱靶量击中目标,为了确保终端攻击角度约束,必须满足为弹目碰撞时刻,即制导结束时刻。
因此,制导设计目标必须同时满足以上两个目标,现在总结如下:
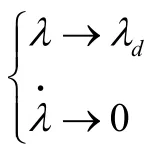
必须同时满足。
3 新的滑模制导律
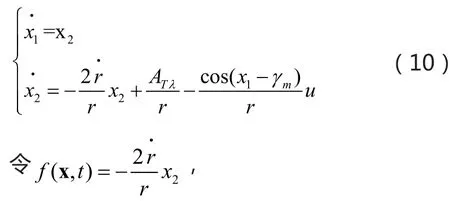
这里选取状态变量如下所示:

那么对式(26)各状态求导,可得到攻击角度约束的制导系统状态方程为

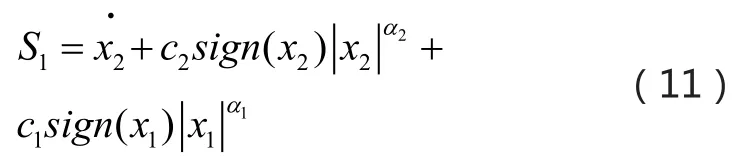
针对系统(10)根选取终端滑模面
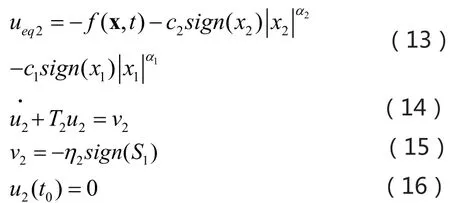
制导律的设计根据定理3.1可得

其中
制导律的证明类同于定理3.1,这里不再赘述。制导律的证明类同于定理3.1,这里不再赘述。
4 仿真结果
考虑地对空导弹末制导与机动目标交战场景,利用非线性二维弹目交战运动方程进行数字仿真,仿真采用欧拉法进行编程仿真,仿真步长取0.01秒。本节将在两种场景下进行仿真实验,用仿真数据验证本文设计制导律的有效性。导弹的初始位置坐标为(0m , 0 m),弹目初始距离为10000米,导弹飞行速度,机动目标的飞行速度假设为,弹体实际提供的最大加速度为。
场景: 打击机动目标,视线角的初值为28.5度,目标的初始位置;仿真结果,导弹攻击时间为11.92秒,终端攻击角度为29.3112度。视线角速率很快收敛到零附近,直到最后时刻开始发散,这是因为导弹加速度制导末端时刻变化过快引起的,弹体加速度完全符合制导要求并且没有发生抖振现象,最终攻击角度基本符合要求,仿真结果验证了本文提出的制导律的有效性。
5 结论
本文对带有攻击角度约束的制导律进一步进行了研究,并通过仿真实验进行了验证,最终得出以下几个结论1)对于传统滑模控制中存在的抖振问题进行了再次探讨,并设计了一种有效消除抖振的控制算法;2)将本文设计的控制算法应用到拦截器制导指令设计中,经仿真验证得到较为理想攻击角度;3)本文设计的制导律没有将符号函数项引入控制输入中,较好的克服了以前研究成果存在的缺陷,进而值得推广应用。
参考文献
[1]Zhenxing Zhang, Shihua Li and Sheng Luo, composite guidance laws based on sliding mode control with impact angle constraint and autopilot lag[J]. Transactions of the Institute of Measurement and Control .2013, 35(6) : 764-776.
[2] 孙胜,张华明,周荻. 考虑自动驾驶仪动特性的终端角度约束滑模导引律[J]. 宇航学报,2013,34(1) : 69 - 78.
[3] 周慧波,宋申民,刘海坤. 具有攻击角约束的非奇异终端滑模导引律设计[J].中国惯性技术学报,2014, 22(5): 606 -618.
[4] Kumar, S. R., Rao, S., and Ghose, D. Sliding mode guidance and control for All-Aspect interceptor with terminal angle constraints[J]. Journal of Guidance, Control, and Dynamics, 2012, 35(4):1230-1246.
[5] V.T. Haimo, Finite time controllers, SIAM J. Control Optim. 1986, 24 (4):760-770.
Design of sliding mode guidance law with attack angle constraint
Xiao Shenglong
(Navy Military Representative Office of Guangzhou shipyard company,150001)
Abstract:In order to improve the interceptor warhead lethality,with attack angle constraint guidance law has been hot spot of academic research.Therefore,the design of guidance law to ensure the smaller miss distance but also to ensure the corresponding angle of attack targets,at present has a lot of control method is applied in the interceptor design guidance,including optimal guidance law,sliding mode guidance law PN guidance law,and so on.We know that the sliding mode control method is robust to external disturbance and parameter uncertainties,but the chattering of the sliding mode control is generally found in the traditional linear sliding mode and terminal sliding mode. Therefore, this paper presents a new method for the design of the control law of the chattering free terminal sliding mode control method. The method not only has good robustness to the external bounded disturbance,but also effectively eliminates the chattering. Finally, digital simulation verifies the effectiveness of the proposed method.
Keywords:guidance law;sliding mode control;chattering free
