车辆外廓尺寸计算机视觉动态测量
2016-04-01梁春疆段发阶
梁春疆,段发阶,杨 毅,李 洋,许 飞
( 天津大学 精密测试技术及仪器国家重点实验室,天津 300072 )
车辆外廓尺寸计算机视觉动态测量
梁春疆,段发阶,杨毅,李洋,许飞
( 天津大学 精密测试技术及仪器国家重点实验室,天津 300072 )
摘要:针对车辆外廓尺寸的精确快速测量,本文提出一种激光光幕和CCD相结合的动态测量方法。本方法采用安装在龙门架顶角的两台CCD相机快速采集被车辆高度调制垂直投射的激光点图像,并应用区域生长质心匹配算法提取边缘投影数据测量车辆的宽度;采用车身侧面序列图像拼接获取车辆侧面全景图像,并对全景图像做一阶投影差分处理精确定位车头和车尾,根据摄像机透视模型测量车辆的长度,并结合宽度边缘分布数据修正长度的测量精度;采用FPGA获取垂直安装的红外光幕侧投影数据测量车辆的高度。本方法与传统的激光雷达和红外光幕的测量方法比较,具有占用场地小,安装结构简单,抗干扰能力强和测量精度高的优点,经过车辆外廓尺寸的现场测试实验,结果表明该方法测量误差小于1%,平均耗时低于50 s,验证了本测量方法的准确性和实时性,且本方法具有较强的鲁棒性和重要的应用价值。
关键词:计算机视觉;车辆外廓尺寸;图像拼接;汽车安全与运营;智能交通
0 引言
近年来,随着我国汽车保有量的不断增加,人们在享受机动车辆带来便利的同时,交通事故和道路设施的早期损坏等问题也频频发生[1]。汽车的综合性能检测成为了维持良好的车辆生产和道路交通秩序、确保道路设施的完好和公路交通安全的有效手段,汽车车身尺寸检测是汽车综合性能检测的重要内容[2]。传统的测量方法多为人工测量,测量误差大、效率低;如今普遍采用红外光幕组合激光雷达测量法[3]和采用激光雷达组合计算机视觉测量法[4]。红外光幕组合激光雷达测量法,采样的频率受现有产品的限制,测宽时需要在地面安装红外光幕接收器,不利于维护且难于达到较高的测量精度,综合测量误差小于2.5%。激光雷达组合计算机视觉测量法,这种测量方法的成本有所降低,但测量的采样率一样难于提高且占用场地较大,综合测量误差小于2%。
本文提出一种基于计算机视觉技术的测量方法[5-8],采用测宽相机组快速采集车辆通过检测区的横向近红外激光光幕光点图像,利用区域分割算法[9-10]分割光点区域,质心提取坐标匹配算法匹配模板坐标提取车辆的宽度和俯视投影数据;采用测长相机组快速采集车辆通过检测区的侧面图像,利用金字塔分解、基于边缘特征的快速拼接融合[11-14]等图像处理算法和几何模型计算车辆的长度,并结合宽度边缘数据修正长度的测量精度;利用FPGA获取红外光幕探测车辆高度的侧正投影数据测量车辆的高度。该测量方法的硬件成本低,占用场地小,测量误差小于1%,测量系统性能稳定可靠,测量过程实现自动化测量。
1 测量系统的组成
1.1 系统整体结构
测量方案整体示意图如图1所示,分为光电触发模块、长度测量模块、宽度测量模块、高度测量模块和测控系统五个部分。
光电触发模块布局3组成扇形发射方式的光电组获取触发信号,用于捕获车辆驶入、离开检测区的开关信号,长度测量模块、宽度测量模块、高度测量模块由测控系统同步控制采集车辆的长度、宽度、高度数据,结合处理算法计算出车辆的外廓尺寸;测控系统完成对各功能模块的调度,数据的接收处理,报表打印、查询、存储、异常报警等功能。
1.2 车辆长度测量原理
待测车辆长度测量原理如图2所示,当车辆行驶入检测区域时,测控系统通过RS232接收光电组R1、R2、R3检测车辆驶入的开始信号,以此启动电路控制器输出CCD同步信号,控制测长机组CCD3和CCD4同步采集车辆通过检测区的侧面图像,对采集的图像进行预处理、Sobel边缘提取、直方图均衡化、金字塔快速拼接融合等图像处理算法获取车辆侧面的全景图像,再通过全景图像作一阶灰度纵投影差分定位车辆的前端和后端位置,结合靠近相机一侧宽度边缘数据修正计算出车辆的长度。
1.3 车辆宽、高测量原理
待测车辆宽度、高度测量原理如图3所示,龙门架两端横向安装有两组横向近红外激光光幕,每组激光光幕激光器间距均匀分布,垂直向下投射到反射面(反射面涂有反光漆以增强反射),中央测控系统控制测宽机组CCD1和CCD2同步快速获取车辆通过检测区的激光光幕投射在反射面上激光点的分布图像,由于采用结构光测量结构,车辆通过检测区时打在车身上的激光点被车辆的高度所调制,激光点图像落在相机的视场之外,对采集到的图像采用区域生长匹配算法提取车辆两侧边缘激光点质心坐标,同时计算激光点区域的面积和周长,根据先验条件去除杂散的干扰点后和已知的模板所存坐标进行匹配,获取车辆边缘点的图像坐标,采用中值滤波、冒泡去噪算法计算出车辆的最大宽度。
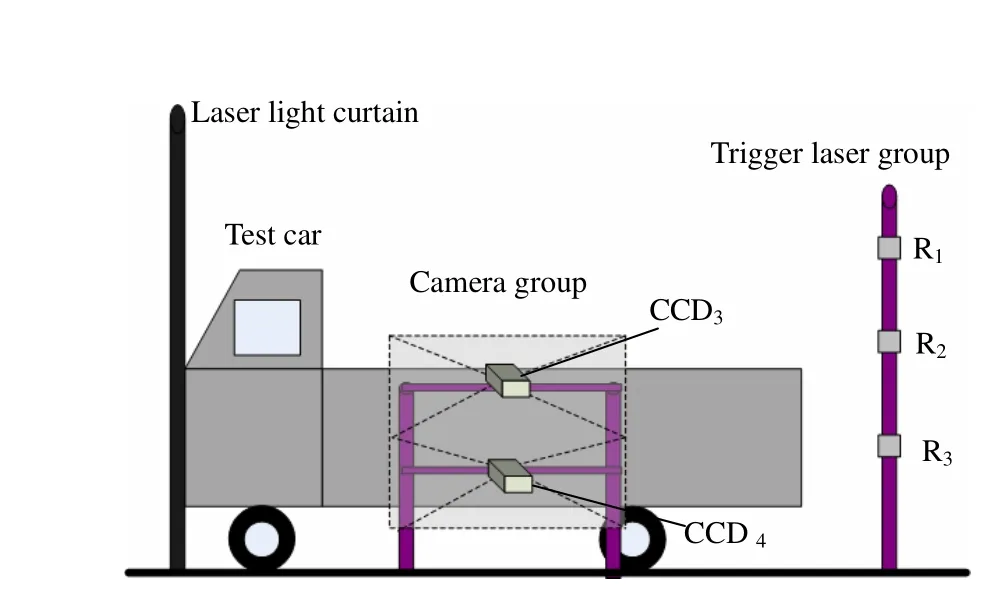
图2 车辆长度测量原理Fig.2 Vehicle length measurement principle
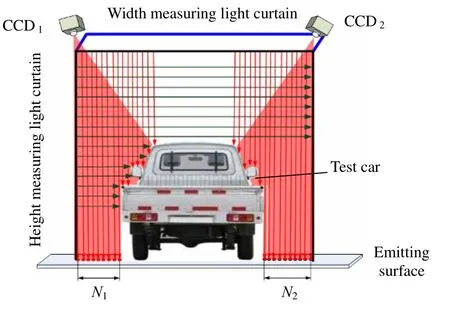
图3 车辆宽度、高度测量原理Fig.3 Vehicle width and height measurement principle
在龙门架纵向安装多组红外光幕,红外光幕连续不断周期性扫描,光幕间隔均匀分布发射器发射平行的红外光线,车辆通过检测区时,光幕被遮挡部分的数据被光幕数据采集器编码,FPGA采集器接收光幕编码的数据,用FIFO给数据添加数据包号并缓冲接收的数据,然后通过RS485总线传输到测控系统,测控系统接收数据利用解码算法可获取车辆高度纵投影数据,采用冒泡去噪算法计算出车辆的最大高度。
1.4 中央测控系统软件架构
测控系统包括数据采集以及命令交互功能块、图像处理算法模块、长宽高数据处理模块、数据库管理和设备自检功能模块。数据采集模块主要完成触发信号、图像数据和红外光幕数据的采集和传输功能。测控系统接收各功能模块的数据后采取相应的处理算法计算车辆的外廓尺寸。
人机交互模块具有测量显示、报警功能,将测量数据和车辆信息输出显示在大屏幕上,当测量到车辆尺寸超标时,进行文字提示和声音报警信号;历史记录查询功能,操作人员能够随时查看已有的车辆测量过程数据及测量结果;报表打印功能,对测量数据和测量结果生成报表打印;用户管理功能,设置系统的用户以及相应的权限信息,从应用软件级别确保系统的安全。软件处理框架如图4所示。
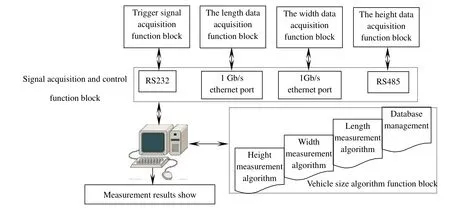
图4 中央测控系统框架Fig.4 Central monitoring and control system framework
2 测量原理数学模型
2.1 基于金字塔快速拼接算法的长度三角测量方法
2.1.1 提取车辆全景像素大小
测控系统控制CCD相机连续采集一序列车辆侧面的图像,为了提高拼接算法的速度,首先对采集的序列图像进行三级金字塔抽样后进行初匹配,记录匹配后的坐标再还原到原始图像中做小范围的精确匹配,记录所有序列间的匹配位置,利用快速融合算法获取车辆侧面的全景图像。本文采用归一化互相关系数作为确定最佳匹配位置的参数,根据模板图像和配准图像的搜索计算,查找互相关系数最大的图像坐标位置作为最佳的匹配位置,配准计算式:
式中:T(m,n)、Si,j( m,n)分别是模板图像和待匹配图像对应像素的灰度值,R(i,j)为两图像间归一化的互相关系数。按照上述方法,对多帧连续图像进行配准和融合,拼接结果如图5、6所示。
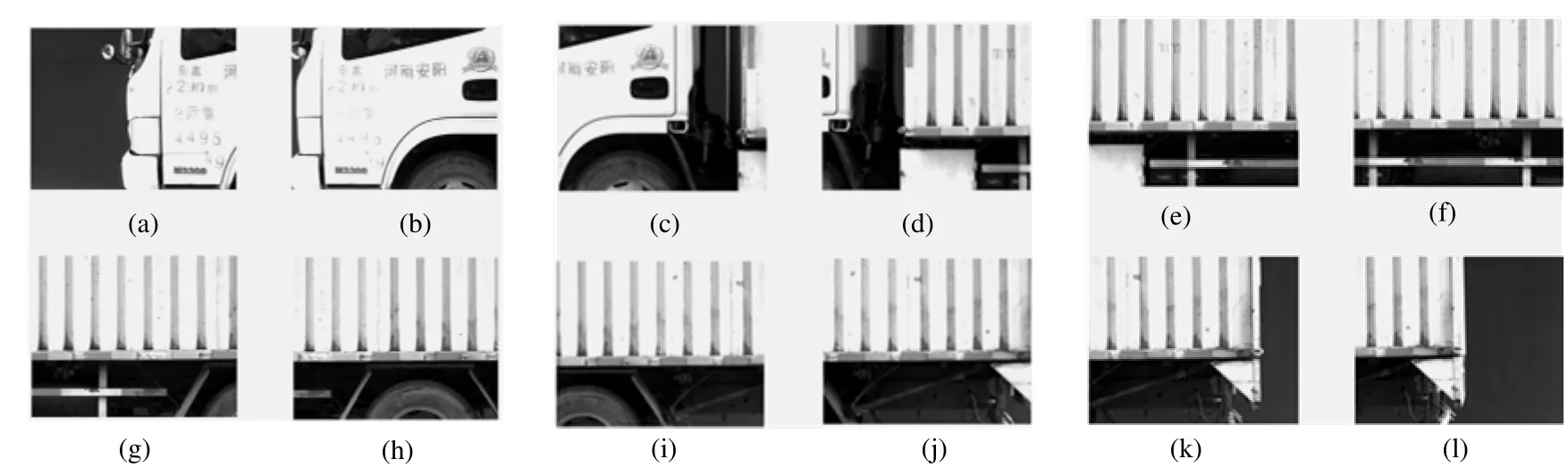
图5 待拼接的图像Fig.5 Images for mosaic
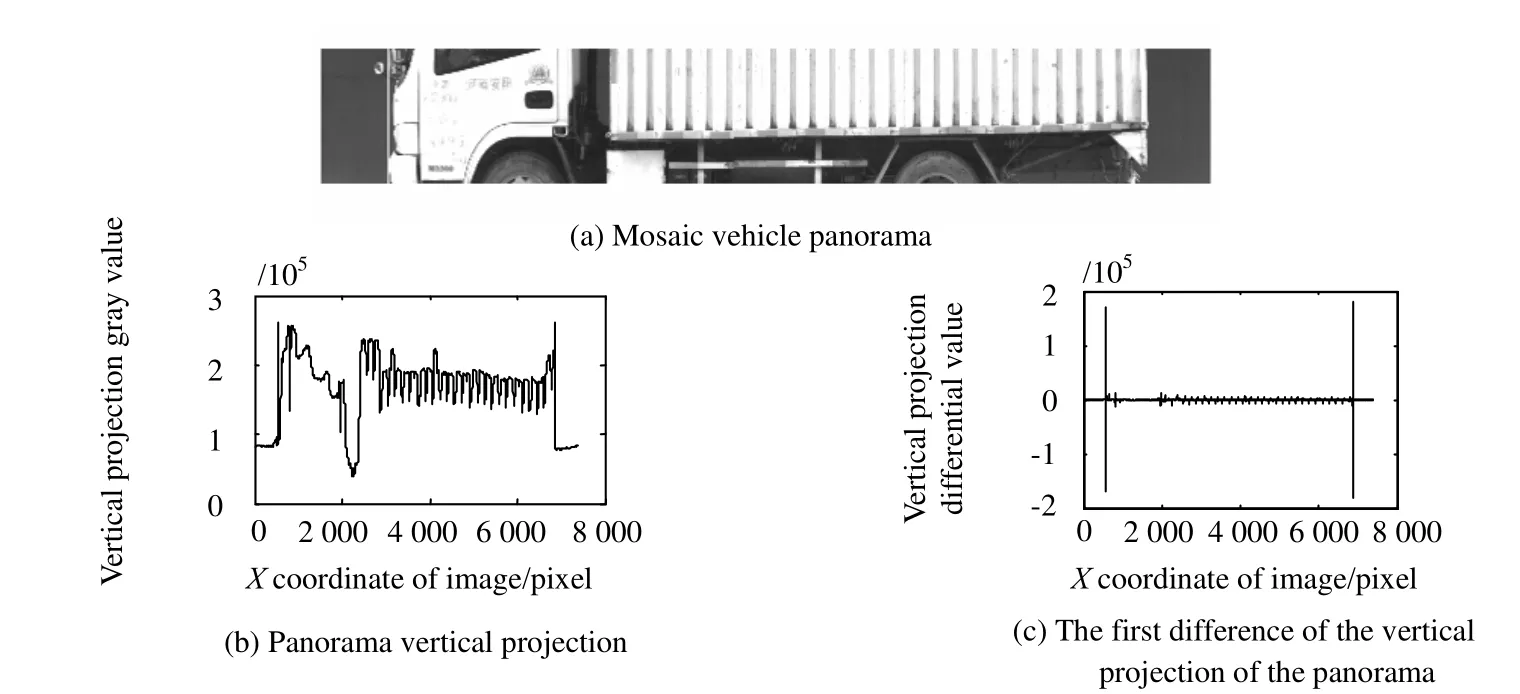
图6 拼接结果及精确定位Fig.6 The mosaic results & precise positioning
图5为经过预处理的待拼接图像,图6(a)为序列图像拼接后的全景图像,图6(b)为全景图像的一维纵投影图像,图6(c)为全景图像纵投影的一阶差分图,根据差分数据精确定位车身的前端和后端,有图可知本文提出的投影差分法定位车辆前端和后端具有很高端精度,且鲁棒性强。采用本文的图像配准和融合算法可以复现出车身侧面全景信息,稳定可靠的拼接质量保证了后续车辆长度测量的精度。
2.1.2 长度计算的几何模型
根据序列图像拼接获取得车身的全景图像素大小,结合宽度一侧的边缘数据计算车身的长度尺寸。长度测量的数学模型如图7所示,图中o点为成像透视点,以o为原点建立摄像机坐标系oxyz,像平面坐标系为O1XY,Z0为相机标定的平面,同时对应到横向光幕一侧的边缘数据,可以得到车身距离相机透视点的相对坐标,每次车身偏离初始位置的变化△Z都可以在宽度的边缘数据中获得,如此可由在三角形oAB中计算出图中标示的车辆全景ROI的实际长度。
根据图7数学模型,可得到位于Z1平面内的长度,但汽车的侧面并未全部处于同一个平面内,汽车前端和后端的弧面各不相同,但同一车型的弧面近似,因此引入修正参数α、β,由此得当车身侧面处于Z1平面处车辆长度的计算公式如下:

式中:X为车身全景像素,f为镜头的焦距,Z0为初始标定的Z向距离,△Z为车身偏离初始位置的距离,α、β是与车型相关的系数,由多组测量数据回归统计得出。
2.2 采用点结构光的宽度测量方法
宽度的测量方法采用点结构光的测量原理,对采集到的图像做区域分割标记处理,提取激光点的质心与模板坐标匹配,根据图像坐标计算其物理坐标,由于CCD3、CCD4处于龙门架的一脚,像平面上每个像素标示的物理尺寸不是均匀分布的,成“近大远小”的分布,故建立数学模型如图8所示。
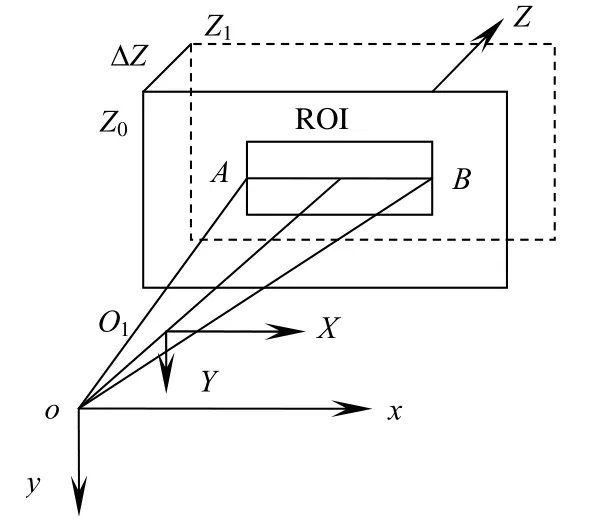
图7 长度测量原理数学模型Fig.7 Length measurement principle mathematical model
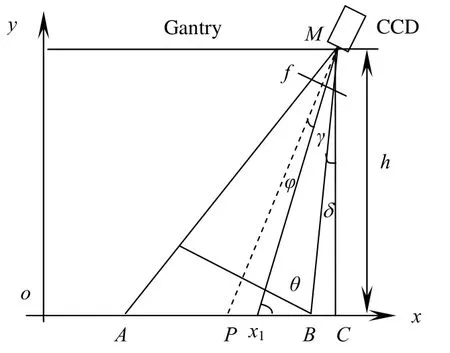
图8 宽度测量数学模型Fig.8 Width measurement mathematical model
图中AB为激光器点云的分布区域,CCD相机安装在龙门架M位置,距离地面的高度为h,f为有效焦距,P点为图像中心对应在反射面上的物点,x1为任意一个激光点,α为相机视场最大位置B对应的夹角,γ为视场角,ν为工作距离,以此建立计算x1的方程如下。
记相机CCD阵面尺寸为W×H,由此可得γ/2的计算式:

由摄像机透视变换模型可得:

在三角形△ACM中,得:
AC=h×tan(γ+δ)(5)
在测量系统中,BC变化范围为200 mm~400 mm,h=5 000 mm,由此计算知δ变化范围是2.29°~4.57°,变化角度很小,为简化计算可以忽略。把式(3)带入式(5),结合三角函数可得:

变换式(6)为

设定摄像机和镜头参数后,f和W是一固定值,h和ν之间是比例关系,由此得:

由此,光点投射部分的距离可由图像中像素X坐标线性表出,记:

故x1物点距离可以用线性方程计算,即:

式中:系数ξ,b可以用最小二乘法拟合计算,X1为激光点在图像中的像素坐标,由此采用图像处理算法提取出图像坐标后可以直接由线性方程计算出物理坐标。
3 测量系统测试实验及误差分析
3.1 测量系统参数设计
为了验证算法的可靠性和准确性,搭建测量系统。试验中选用BASLER Ace1300相机,Microvision 25 mm镜头,BOSCH GLM激光测距仪,铅垂,龙门架设计为5 m×5 m,测长机组距离中心线4.5 m,测长机组CCD3、CCD4同步帧频为10 f/s,测宽机组CCD1、CCD2同步帧频为70 f/s。龙门架两端安装两组横向光幕,每组2 m,中间间隔1 m,光幕间隔10 mm均匀分布5 mW,780 nm激光器;龙门架纵向安装4 m的红外光幕,光幕间隔11 mm均匀分布激光发射器,另一侧对应安装红外光幕接收器,数据采集输出连接到中央测控系统,根据以上参数构建测量系统如图9所示。
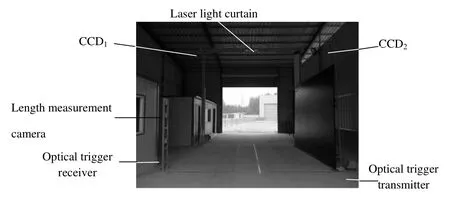
图9 测量系统Fig.9 Measurement system
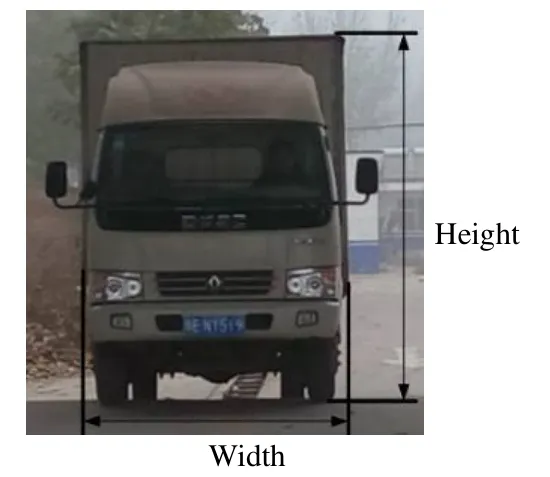
图10 待测厢式货车Fig.10 Test car
3.2 测试实验准确性分析
为了验证算法的可靠性,对车辆进行重复测量实验。首先使用铅垂标记车辆最长、最高、最宽的位置,然后使用BOSCH GLM激光测距仪测得待测车辆的实际尺寸作为标准尺寸,最后使用测量系统对轻型厢式货车进行3组重复测量,实验结果如表1所示。
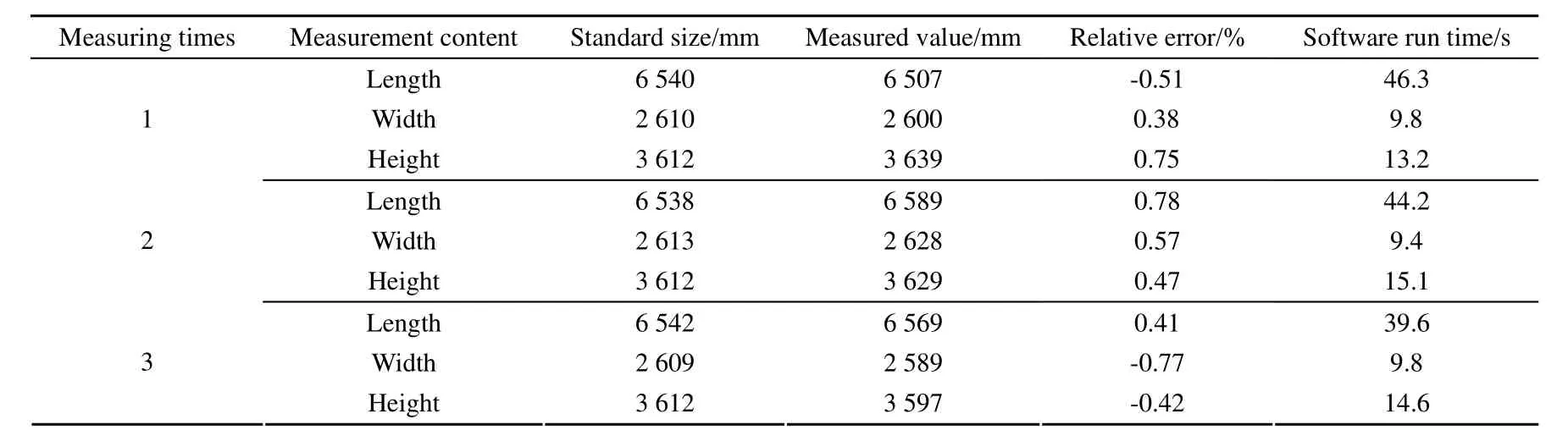
表1 轻型厢式货车测量实验数据Table 1 Vehicle measuring data
实验结果表明,3次的重复测量,与激光测距仪测量值进行比较,系统测量误差绝对值均小于1%,平均耗时小于50 s,验证了测量系统的准确性和稳定性。
4 结论
目前,汽车的车身尺寸检测成为汽车综合性能检测以运行安全监测的重要内容之一。本文提出一种车辆外廓尺寸的视觉测量方法,该方法充分地利用了计算机视觉测量技术和光电检测技术,测量精度高、速度快,并且具有较强的鲁棒性。通过3次重复性测量实验,实验结果显示,该测量方法对车辆外廓尺寸的测量相对误差小于1%,测量消耗的时间优于50 s,满足了测量准确性和快速性的要求,为车辆综合性能检测和智能交通系统提供了一种有效的解决方案,在实际应用中具有重要意义。
参考文献:
[1]刘琦. 道路交通安全管理研究 [D]. 青岛:中国海洋大学,2012:12-17. LIU Qi. The road traffic safety management research [D]. Qingdao:Ocean University of China,2012:12-17.
[2]宋健,王伟玮,李亮,等. 汽车安全技术的研究现状和展望 [J]. 汽车安全与节能学报,2010,30(2):98-106. SONG Jian,WANG Weiwei,LI Liang,et al. Research status and prospects of automotive safety technology [J]. Journal of Automotive Safety and Energy,2010,30(2):98-106.
[3] 陈显龙,陈晓红,罗新伟,等. 车辆尺寸测量方法,包括安置垂直和平行于车辆行驶方向的激光雷达测量车辆的长度:中国,102679889 [P]. 2009-07-06. CHEN Xianlong,CHEN Xiaohong,LUO Xinwei,et al. Method for measuring vehicle size,involves arranging horizontal plane parallel to vehicle driving direction and perpendicular to scanning plane to measure length of vehicle using laser radar:CN,102679889-A; 102679889-B [P]. 2009-07-06.
[4] 陈长军,刘勇,方人宇,等. 车辆整体尺寸自动测量装置,使用计算机通过数据电缆连接测量设备,并且二维扫描仪直接安装在屋顶,侧壁或者屋顶和侧壁的角落:中国,CN201429410-Y [P]. 2010-03-24. CHEN Changjun,LIU Yong,FANG Renyu,et al. Automatic vehicle overall dimension measuring device,has computer connected to measuring device through data cable,and two-dimensional laser scanner directly fixed at roof,side wall or corner between roof and side wall in building:CN,201429410-Y [P]. 2010-03-24.
[5] 刘毅. 汽车车身尺寸检测系统研究 [D]. 长春:吉林大学,2006:35-43. LIU Yi. Study on Vehicle Dimensional Measuring System [D]. Changchun:Jilin University,2006:35-43.
[6] 姜庆昌. 汽车轮廓尺寸测量机的研究 [D]. 哈尔滨:哈尔滨工业大学,2006:18-27. JIANG Qingchang. Study of the Automobile Outline Size's Measuring Machine [D]. Harbin:Harbin Institute of Technology,2006:18-27.
[7] 卞晓东. 基于机器视觉的车辆几何尺寸测量系统研究 [D]. 南京:东南大学,2005:27-31. BIAN Xiaodong. Research on Vehicle Dimensions Measuring System Based on Machine Vision [D]. Nanjing:Southeast University,2005:27-31.
[8] 翟乃斌. 基于计算机视觉的汽车整车尺寸测量系统的研究 [D]. 长春:吉林大学,2007:31-39. ZHAI Naibin. Study on Testing System of Vehicle-body Dimension Based on Computer Vision [D]. Changchun:Jilin University,2007:31-39.
[9] 罗东华,余志,李熙莹,等. 基于边缘的背景差法在车流量检测中的应用 [J]. 光电工程,2007,34(11):70-73. LUO Donghua,YU Zhi,LI Xiying,et al. Application of edge-based background difference in traffic volume extraction [J]. Opto-Electronic Engineering,2007,34(11):70-73.
[10] 刘贤喜,李邦明,苏庆堂,等. 一种新的二值图像连通区域准确标记算法 [J]. 计算机工程与应用,2007,43(22):76-78,98. LIU Xianxi,LI Bangming,SU Qingtang,et al. New exact labeling algorithm of connected regions in binary images [J]. Computer Engineering and Applications,2007,43(22):76-78,98.
( )( )
[11] 雷华. 基于金字塔反射镜的视场无缝拼接技术研究 [D]. 杭州:浙江大学,2010:31-40. LEI Hua. Research on an seamless optical butting technology based on pyramid reflector [D]. Hangzhou:Zhejiang University,2010:31-40.
[12] 王建,刘肖,王国珲. 基于梯度变换的多传感器图像融合算法 [J]. 重庆理工大学学报:自然科学,2012,26(10):62-65. WANG Jian,LIU Xiao,WANG Guohui. Multi-Sensor Image Fusion Algorithm Based on Gradient Transform [J]. Journal of Chongqing University of Technology:Natural Science,2012,26(10):62-65.
[13] 李建林,俞建成,孙胜利. 基于梯度金字塔图像融合的研究 [J]. 科学技术与工程,2007,7(22):5818-5822. LI Jianlin,YU Jiancheng,SUN Shengli. Study of Image Fusion Based on Grad Pyramid Algorithm [J]. Science Technology and Engineering,2007,7(22):5818-5822.
[14] 孙玉秋,田金文,柳健. 基于图像金字塔的分维融合算法 [J]. 计算机应用,2005,25(05):1064-1065,1075. SUN Yuqiu,TIAN Jinwen,LIU Jian. Fractal dimension fusion method based on image pyramid [J]. Computer Applications,2005,25(05):1064-1065,1075.
A Vehicle Outer Contour Dimension Measuring Method Based on Computer Vision Technology
LIANG Chunjiang,DUAN Fajie,YANG Yi,LI Yang,XU Fei
( State Key Laboratory of Precision Measuring Technology & Instruments, Tianjin University, Tianjin 300072, China )
Abstract:A dynamic measuring method for combining the laser light curtains and CCD is proposed to achieve a precise measurement of the vehicles outside dimensions. Rapidly acquisition image of the laser spot light curtain is modulated by vehicles height with CCD cameras mounted gantry vertex, and extract the vehicle distribution data of the edge based on region growing centroid matching algorithm to measure vehicle width. Secondly, a sequence of images with mosaic methodis used to get the vehicle panoramic image, and pinpoint the front and rear of vehicle by panoramic image projected first-order differential, then depending on the camera perspective model to measure the length of the vehicle, combined with a width edge distribution data to correct the length accuracy. Obtain infrared light curtain vertically mounted projection data via FPGA processing system to measure vehicle height. The measurement method have the advantages of a space occupied by small, simple installation structure, strong anti-jamming capability and high accuracy measurements compared with traditional measurement methods of laser radar and infrared light curtain. The results of the outer contour of the vehicle size measuring test show that the measurement system error is <1% and the average time-consuming is lower than 50 s. Verify the accuracy and real time of this measurement method, and this measurement method is robust and important applications.
Key words:computer vision measurement; vehicles’ size detection; image mosaic; automotive safety and operations; intelligent traffic system
作者简介:梁春疆(1991-),男(汉族),云南昆明人。硕士研究生,主要研究工作是计算机视觉与光电检测技术。E-mail: liangchunjaing@126.com。
基金项目:国家863高技术计划项目(2013AA102402);国家自然科学基金项目(51275349)
收稿日期:2015-03-26; 收到修改稿日期:2015-07-11
文章编号:1003-501X(2016)01-0042-07
中图分类号:TP391;TP24
文献标志码:A
doi:10.3969/j.issn.1003-501X.2016.01.008