一种新型的太阳能无人机分布式相控阵天线
2016-03-30陈军全
陈军全
一种新型的太阳能无人机分布式相控阵天线
陈军全
(中国西南电子技术研究所,四川 成都 610036)
由于远距离传输、小口径安装、精确波束指向等诸多因素,传统的相控阵天线无法满足临近空间长航时太阳能无人机的通信需求。针对此问题,提出了一种新型的太阳能无人机分布式相控阵天线,以实现高数据率远距离传输;基于分布式阵列方法解决天线安装问题;采用基于应变测量元件的波束校正方法实现精确波束指向。设计了一种Ka频率的分布式相控阵天线,通过仿真,验证了本文提出方法的正确性。
无人机;分布式天线;相控阵天线;子阵;波束校正;信号合成
太阳能无人飞机具有巡航时间长、飞行高度高、覆盖区域广等优势,可执行侦察监视、预警、探测等任务,已逐渐引起人们的重视[1-2]。然而,根据临近空间长航时太阳能无人机的要求,以及大尺度机翼/机体结构安装和飞行器载荷轻的限制,太阳能无人机天馈系统设计仍然面临一些挑战。第一,太阳能无人机飞行高度高、覆盖范围大、通信链路长,为了确保通信质量,通信链路需满足高数据率远距离传输[3],即天线具有高EIRP(Equivalent Isotropic Radiated Power)、G/T(Gain/Temperature)值;第二,为了追求高的气动效率和高空长航时作业,太阳能无人机一般采用覆盖大量太阳能板的大展弦机翼,导致平台很难满足大口径天线阵列安装条件。第三,由于太阳能无人机飞行依靠太阳能,所以机载设备尽量要减少对飞机能量的消耗。基于轻型结构理念,太阳能无人机降低了飞机的结构强度,在飞行过程中容易发生结构变形,为了保证正常通信,需考虑天线实时的精确波束指向[4]。
采用有源相控阵天线可以实现高EIRP和G/T值的天馈系统[5-6],满足飞行器高数据率远距离传输。然而,阵元数目较多(数千个阵元),采用常规的相控阵天线体制大口径阵列设计,阵列的馈电网络设计难度大,整个阵列的质量和体积无法满足机翼安装条件。采用分布式天线[7-8],可以将大口径天线阵列性能通过多个小口径天线阵列实现,适合太阳能无人机的机翼安装条件。但是,常规的分布式天线对每个阵元都进行自适应处理,由于相控阵体天线的阵元数多,算法很难实现灵活、快捷的特点。对于无人机平台,人们对分布式阵列开展了相应的研究,构建了相应的MIMO(Multiple Input Multiple Output)信道模型,通过采用多天线和空时编码技术有效对抗多径衰落、机身对天线的遮挡效应、提高通信容量,实现可靠的通信[4-9]。然而,在这些研究中很少涉及相控阵天馈系统与应用平台适应性的问题。因此,针对新的应用平台特点,太阳能无人机对相控阵天线的整体架构提出了新的需求。
本文提出了一种太阳能无人机分布式相控阵天线设计方法,采用有源相控阵天线方式,实现高的天线增益,为太阳能无人机提供高数据率远距离传输;基于分布式阵列方法,把大口径天线阵列分为多个面积较小的子阵单元,并共形安装在无人机不同位置,从而解决安装受限的问题;在分布式天线子阵单元中安装应变测量元件,利用实时姿态参数对子阵单元波束指向进行校正,解决子阵单元波束指向受结构变形影响的问题。最后设计了一种Ka频率分布式相控阵,通过仿真,验证了本文提出方法的正确性。
1 分布式相控阵天线基本原理
基于分布式子阵理念,分布式相控阵天线架构主要包含两个方面:子阵单元和信号合成单元,如图1所示。子阵单元包括天线阵面,波束合成单元(TR组件和馈电网络),以及提供波束指向信息的波束控制单元(子阵姿态测量单元和波束控制器),具有相控阵系统[10-11]基本功能,根据要求可实现发射和接收波束扫描。信号合成单元的功能是采用自适应波束形成算法,通过改变各子阵输入和输出信号的相位,形成一个总的指向波束。每个子阵单元与信号合成单元之间采用光纤方式连接,实现轻量化设计,同时支持高速数据传输要求。
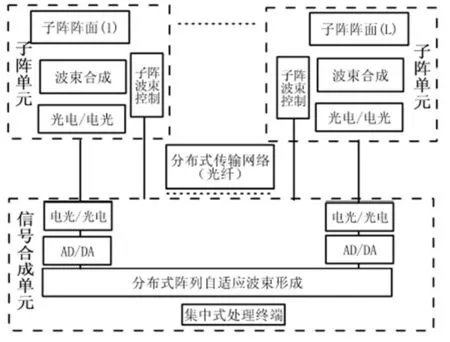
图1 分布式相控天线结构框图
为了能够实现分布式相控阵天线实时波束指向基本功能,系统需完成两个步骤:一是每个子阵单元的波束合成[12],二是所有子阵单元的信号合成[13]。
1.1 子阵单元波束指向校正
对于第一个步骤,太阳能无人机机翼长达几十米,在飞行过程中存在严重变形,安装在机翼不同位置的子阵单元相对于卫星或者地面站的实时角度会发生变化。如果直接采用机上航电系统提供的指向角,子阵单元波束指向将存在严重误差。
为了实现子阵单元精确波束指向,定义三个坐标系统:地球坐标系(,其中平面与水平面平行,轴垂直指向天空)、机身坐标系(,其中平面为飞机机身平面,轴垂直指向天空)、子阵单元阵面坐标系(,其中平面为阵面平面,垂直该平面指向天空)。
式中:
式中:
因此,添加姿态测量单元,子阵单元指向校正过程简单描述为:首先,根据机上航电系统提供的姿态参数()和卫星参数(),获得卫星在地球坐标系下的坐标;然后,利用子阵单元姿态测量单元获得天线阵面的姿态参数(),通过坐标变化,最终实现卫星相对于子阵单元阵面的精确的波束指向()。
1.2 子阵单元信号延时校正
由于子阵单元相互距离可能远远大于波长,导致其输出信号延时()可能远远超过一个符号周期(sym),如图2(a)所示。在该情况下,不同子阵单元的输出信号(符号a)无交集,无论后级如何进行相位校正操作,都无法实现子输出信号的同相叠加,从而导致整个系统无法工作。为了简化子阵单元设计,延时校正在集中式处理终端中实现,通过添加数字延时单元,对每个子阵单元的输出中频信号进行整数倍的采样周期(s)延时校正,从而。在图2(b)中,校正后阴影部分为相同符号重叠部分,那么整个系统可以实现同相叠加。整个延时校正示意图如图2所示(为了表示方便,符号的载波在图中忽略了)。

图2 延时校正示意图
在具体实现时,延时模块是在数字域完成,关键问题是如何求解延时单元个数(M。假设在机身坐标系下,信号的入射角度为0,第个子阵相位中心位置坐标为:
式中:p,p,p是对应,,轴坐标。
信号的波数矢量可以表示为:
式中:c对应载波波长。那么,M计算公式为:
校正后的延时差为:
2 分布式相控阵天线实现方法
2.1 分布式子阵单元设计
分布式相控阵天线的子阵单元是一个简单的有源相控阵子系统,主要由天线阵面、TR组件、馈电网络、波束控制、子阵波束校正、电源模块等模块组成,基本结构如图3所示。
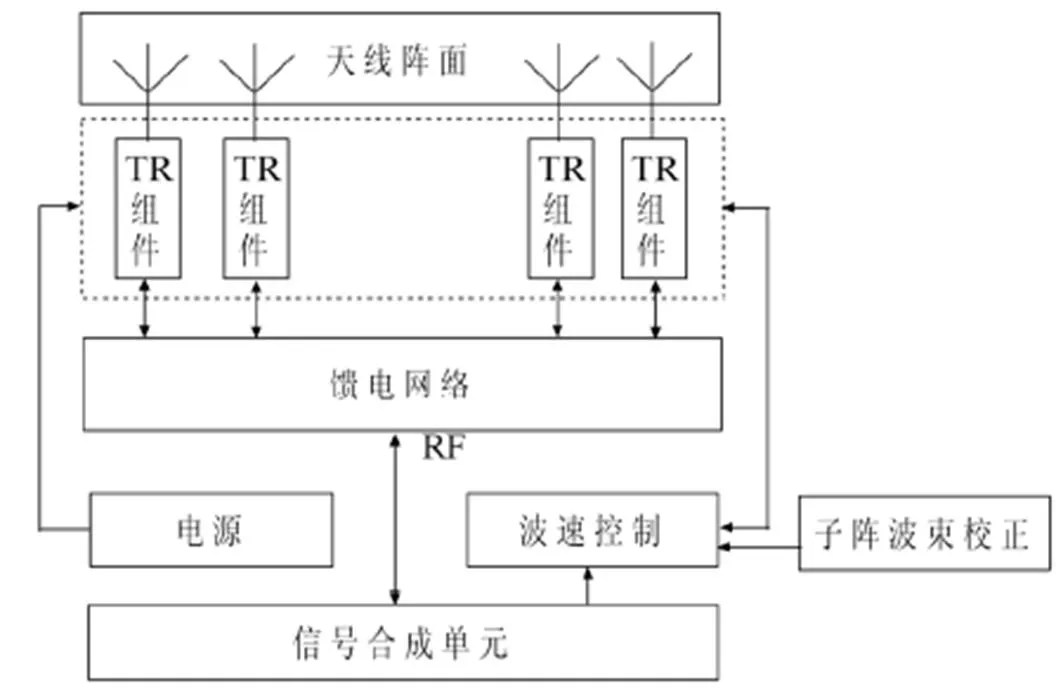
图3 子阵单元设计框图
在子阵单元构架上,采用轻质、高效有源相控阵天线技术设计。同时,在每个子阵单元安装三维电子罗盘,通过测量获得子阵阵面姿态信息,实现每个子阵单元的波束校正功能。基本工作原理如下:首先,根据信号合成单元传来的方位角、俯仰角、频率等信息,通过子阵波束校正和波束控制,设置TR开关状态和数字移相器控制码等参数,然后,完成发射状态和接收状态操作。其中:发射状态是使辐射方向指向目标方向,完成功率分配、移相、功率放大后,送达天线阵面,实现功率的空间定向辐射;接收状态是使辐射方向指向目标方向,完成移相、功率放大,功率合成、送达信号合成单元,实现定向空间的功率合成输出。
2.2 分布式信号合成单元设计
鉴于子阵单元的收发模式几乎是可逆的,以接收系统为例,描述分布式信号合成单元设计。在接受状态,分布式信号合成单元的目的是校正每个子阵的输出信号,使其具有相同的相位,完成信号合成输出。信号合成单元系统包括三个组成部分:一是下变频和中频放大模块,二是子阵单元延时校正模块,三是相位校正模块,整体结构如图4所示。
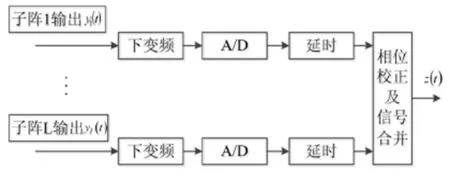
图4 信号合成单元设计框图
每个子阵单元完成模拟合成之后,输出射频信号y()为:
式中:()为复基带信号;表示信号频率;为子阵输出信号延时;n()为噪声。
为了获得合成信号(()),只需要完成相位一致性校正,可采用相应的相位校正方法,例如:功率倒置LMS自适应滤波算法、SUMPLE算法、有限反馈的随机相位校正方法,等等。通过以上处理,分布式相控阵天线将最终()输出给通信系统后端进行相应信号处理。
3 实例与仿真
3.1 分布式相控阵整体设计
子阵单元具有相控阵天线系统基本功能,应满足相控阵天线设计基本准则。子阵单元采用收发阵列阵面分开、共孔径设计方案,接收和发射阵列阵元间距都为6 mm,按矩形栅格阵布阵,发射和接收阵列单元数都为8×8,子阵单元天线阵面布局见图5。
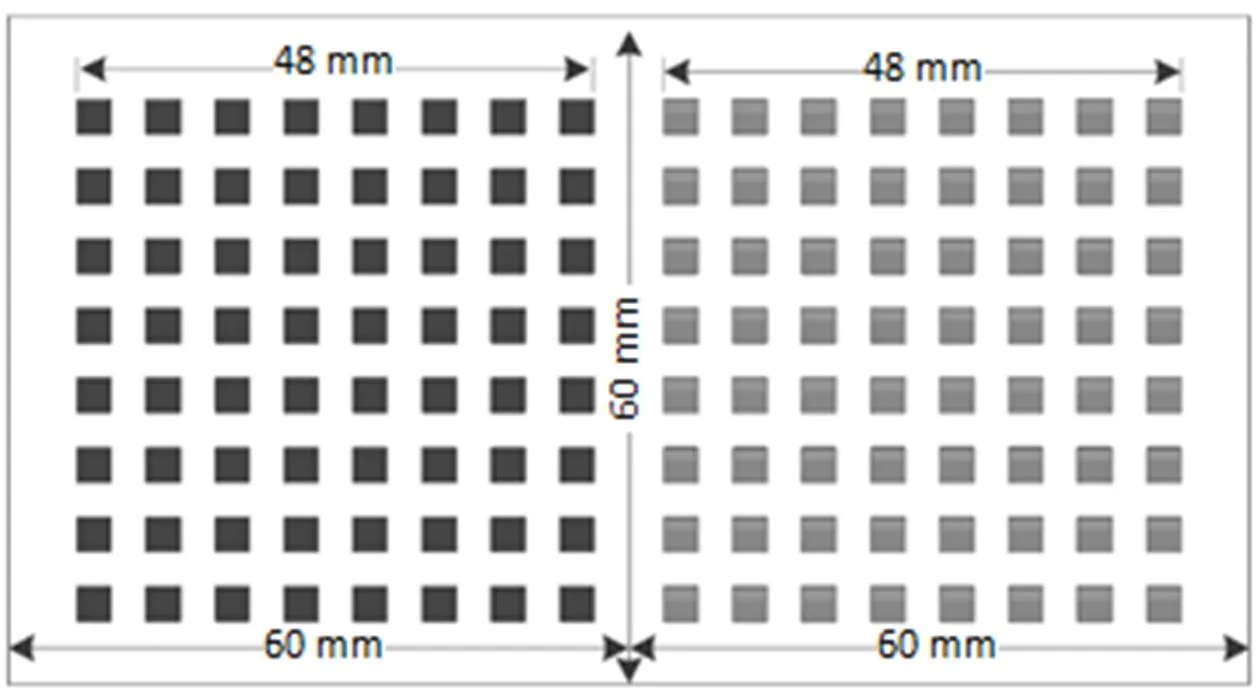
图5 收发阵列天线单元布局图
基于小型化、轻量化考虑,采用结构功能一体化体制相控阵[14],每个收发共口径子阵单元体积≤120 mm×60 mm×30 mm,按整块纯度80%金属铝计算,质量≤467 g,从而子阵单元可以方便地安装在飞机机不同位置。在子阵单元下面埋置三维电子罗盘,测出大尺度机翼变形时子阵位置,实现子阵单元最大波束校正。同时,基于低热耗考虑,每发射通道输出功率按P=10 mW(考虑自然散热),阵列单元增益G=4.0 dB,整机系统接收噪声为NF=5.0 dB,整个相控阵天线系统的EIRP值和G/T值为:
式中:F、T分别为相控阵天线的发射和接受单元总个数;通过计算可得:相控阵天线系统可实现法向EIRP≥34.2 dBW,G/T≥5.1dB/K,扫描±60°时考虑天线增益损失5 dB,则EIRP≥29.2 dBW,G/T≥0.1 dB/K,满足目前的通信需求。
为了减少子阵单元对太阳能板的遮挡,子阵单元分布在大尺度机翼的两侧靠近边缘位置,布阵方案如图6所示。每个子阵单元采用分布式光纤传输网络,通过光电/电光转换采样,完成每个子阵的自适应波束形成。每个子阵通过光电转换芯片完成分布式自适应天线的终端集中式处理。如果按8个子阵计算、信号带宽100 MHz、采样率400 MHz、FPGA工作时钟200 MHz、迭代次数1 000次,信号合成单元集中式处理,自适应波束形成时间1 ms左右,可满足分布式子阵实时自适应需求。
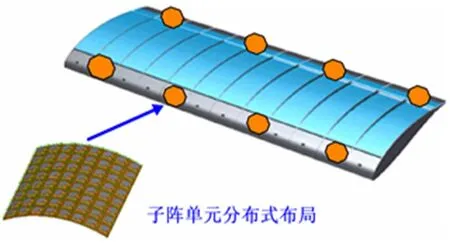
图6 子阵单元布阵示意图
3.2 天线子阵单元仿真分析
天线子阵单元采用仿真软件进行电性能仿真设计,并加工最终实物图,如图7所示。基于半实物仿真,对天线阵面的接收和发射方向图进行合成,扫描方向图,如图8所示。从图中可以看出:分布式子阵单元可以实现方向图正确扫描,随扫描角的增加子阵单元增益不断减小,与理论分析基本一致。

图7 子阵单元天线阵面样件实物图
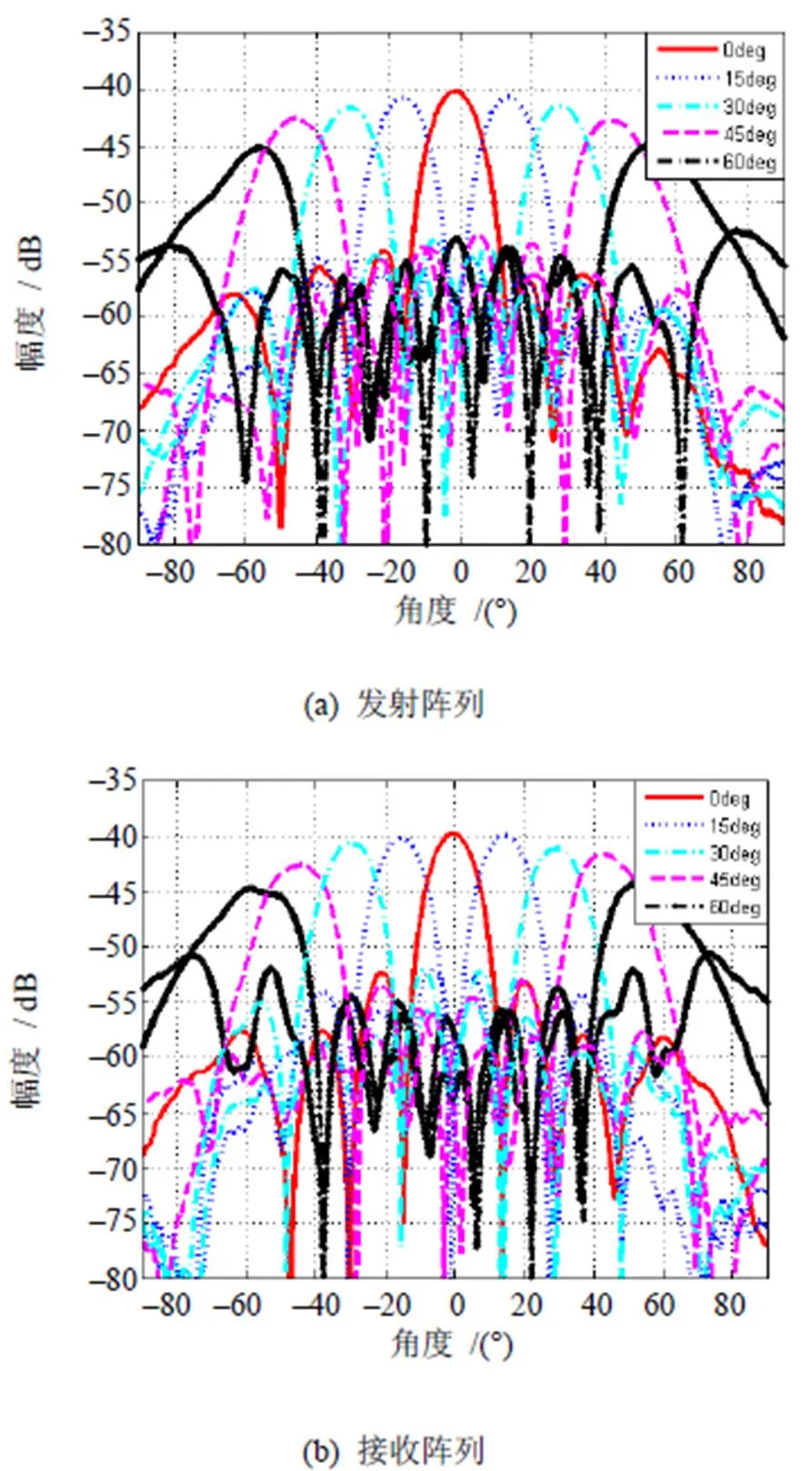
图8 子阵单元半实物仿真扫描方向图
考虑最为严重的情况,子阵安装在机翼末端,距离机身70 m。根据变形情况,机翼前后扭曲最大5 m(=4º);机翼上下弯曲变形最大10 m(=8º);机翼沿着机翼轴线扭矩产生横滚角最大(=30º)。当波控系统采用(,)=(0º,0º)指向角度,根据计算卫星真实角度为(,)=(30º,105º)。若不指向校正,该子阵主瓣完全偏离卫星方向。若电子罗盘测量的航向角、俯仰角、方位角均存在误差,分别为、、、、、,均服从(0,)的高斯分布,采用蒙特卡洛法(= 1 000)仿真不同指向角度(,),子阵增益衰减平均值,如图9所示。
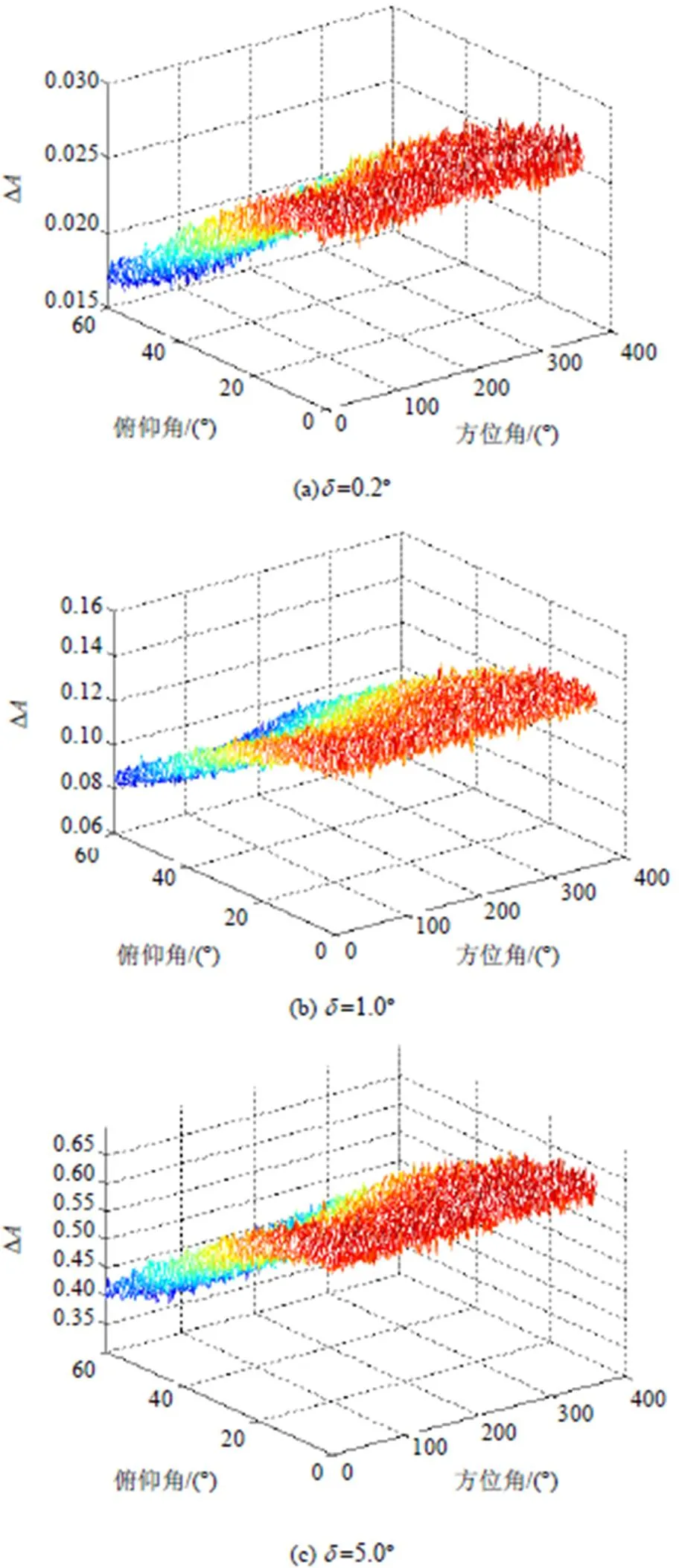
图9 电子罗盘测量误差对阵列增益衰减的影响
3.3 信号合成单元仿真分析

图10 两个子阵延时校正后的符号重叠情况
从仿真可得:随采样率的增加,延时校正后重叠比例不断增加。当采样率为200 MHz,两个子阵的相同符号在延时校正后重叠比例达到90%,能够满足系统的使用需求。为了进一步实现同一符号最大程度的符号重叠,可采用分数倍延时校正,即采用FIR滤波器结构实现。该情况下不同的指向角度对应不同的值,因此该分数阶FIR滤波器是一个变系数滤波器,采用自适应滤波的方式确定其值。
假设子阵单元轴方向间距0.5 m,轴方向间距5 m,采用基带信号为70 MHz的单点频信号,经过延时校正后,子阵信号延时分别为0.0,1.1,2.3,3.5,4.6,3.2,1.9,0.9 ns。当波束指向法向为(0º,0º)时,各子阵输出SNR相等时,分布式子阵合成输出的信号SNR如图11所示。从图中可得:在大SNR情况下,所有信号合成方法性能基本相同,与理想情况非常接近。在小SNR时,针对不同应用需求可以采用不同算法实现。
不考虑校正误差情况下,分布式相控阵天线合成二维仿真方向图(其中阵列因子为归一化方向图),如图12所示。从图中可以看出:相控天线能够实现正确指向,合成方向图主瓣宽度约为1º;由于子阵间距远远大于半个波长,方向图中出现了很多栅瓣,针对该问题,在实际工程设计方案,可以通过加权处理实现栅瓣抑制。
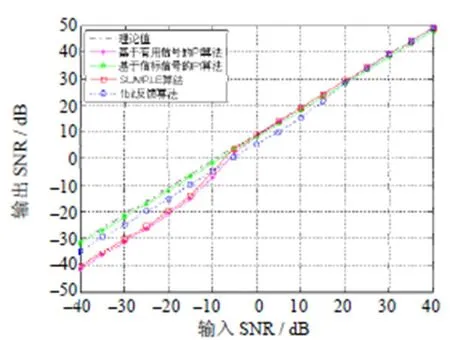
图11 信号合成方法性能比较图
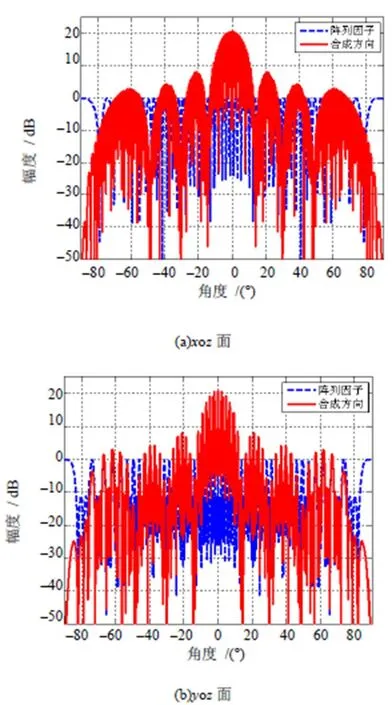
图12 不考虑校正误差,分布式相控阵天线合成方向图
4 结论
针对太阳能无人机的通信需求,从天馈系统与平台适应性出发,提出了一种新的分布式相控阵天线设计方法。该方法采用相控阵天线方式为太阳能飞机实现高数据率远距离传输,同时采用分布式子阵设计方法实现等效大口径天线,从而解决天线安装的问题;最后采用应变测量元件的波束校正方法实现分布式相控阵天线精确波束指向。
本文构建了分布式相控阵天线架构,推导并给出了子阵单元波束指向校正和子阵信号延时校正的计算公式,以一种Ka频率分布式相控阵天线为例,完成了相应的分布式相控阵整体设计。通过仿真,实现了分布式相控阵天线的精确波束指向,验证了本文提出方法的正确性。
[1] 曹秋声, 张会军. 高空长航时无人机的发展特点及技术难点探讨 [J]. 中国电子科学研究院学报, 2008, 3(1): 8-13.
[2] MANUEL J, ALONSO I, PEREZ M S. Phased array for UAV communications at 5.5GHz [J]. IEEE Antenna Wireless Propagation Lett, 2015, 14: 771-774.
[3] 关中锋. 美军无人机通信系统发展现状及趋势[J]. 通信技术, 2014, 47(10): 1109-1113.
[4] 陈登伟, 高喜俊, 许鑫, 等. 姿态变化对无人机MIMO信道容量的影响 [J]. 无线电工程, 2015, 45(7): 54 -58.
[5] LAMBARD T, LAFOND O, HIMDI M, et al. Ka-band phased array antenna for high-data-rate SATCOM [J]. IEEE Antenna Wireless Propagation Lett, 2012, 11(1): 256-259.
[6] LI L S, HONG W, ZHANG Y, et al. Design and implementation of an active array antenna with remote controllable radiation patterns for mobile communications [J]. IEEE Trans Antenna Propagation, 2014, 62(2): 913-921.
[7] 陈根华. 分布式阵列米波雷达高精度测角问题研究[D]. 西安: 西安电子科技大学, 2013.
[8] 臧会凯, 雷欢, 但晓东, 等. 分布式雷达相参发射原理与性能分析 [J]. 电子与信息学报, 2015, 37(8): 1801-1807.
[9] 黄丽莲, 刘阔, 项建弘. 基于无人机的三维MIMO信道建模与仿真分析[J]. 系统工程与电子技术, 2015, 37(5): 1185-1189.
[10] 张长青, 朱安福, 冯玉涵. 基于铁电移相器的Ka波段低成本相控阵天线研究 [J]. 电子元件与材料, 2012, 31(8): 47-49.
[11] 尹经禅. S频段大扫描角圆极化相控阵天线研制[J]. 电子元件与材料, 2014, 33(7): 44-47.
[12] 陈子欢, 刘刚, 蒋宁. 一种新的子阵结构及其自适应性能分析 [J]. 电子信息对抗技术, 2006, 21(3): 33-37.
[13] KONG S, LEE S, KIM C Y, et al. Wireless cooperative synchronization of coherent UWB MIMO radar [J]. IEEE Trans Microwave Theory Tech, 2014, 62(1): 154-165.
[14] 何庆强, 姚明, 任志刚, 等. 结构功能一体化相控阵天线高密度集成设计方法 [J]. 电子元件与材料, 2015, 34(5): 61-65.
(编辑:陈渝生)
Novel distributed phase array antenna of solar powered UAV
CHEN Junquan
(Southwest Institute of Electronic Technology, Chengdu 610036, China)
Due to some limitations (long-distance transmission, small-caliber mounting, accurate beam steering), the communication demand of long endurance solar powered unmanned aerial vehicle (UAV) cannot be satisfied by using the traditional phase array antenna. According to these questions, a novel distributed phase array antenna for UAV was proposed. It employed phase array antennas to realize the high data rate and long-distance transmission; and then, it implemented the method based on distributed subarray to solve the installation problem; finally, it also employed the beam correction method used strain measuring devices to establish accurate beam steering. As a sample, a Ka-band distributed phase array antenna was designed. The feasibility of the proposed method is validated by the simulation.
UAV; distributed antenna; phase array antenna; subarray; beam forming remedy; signal combining
10.14106/j.cnki.1001-2028.2016.07.013
TN823
A
1001-2028(2016)07-0053-07
2016-04-13
国家高技术研究发展计划“863”资助项目(No. 2015AA1443);国家重点基础研究发展计划“973”资助项目(No. 6131)
陈军全(1986-),男,四川广安人,工程师,博士,从事电磁场与天线技术研究,E-mail: chenjqscu@163.com。
2016-07-01 10:50:44
http://www.cnki.net/kcms/detail/51.1241.TN.20160701.1050.013.html
