基于UG软件的曲轴与连杆的优化设计
2016-03-30沈宁杨灿张弛山东理工大学上海交通大学机械与动力工程学院
沈宁 杨灿 张弛(.山东理工大学;.上海交通大学机械与动力工程学院)
基于UG软件的曲轴与连杆的优化设计
沈宁1杨灿2张弛2
(1.山东理工大学;2.上海交通大学机械与动力工程学院)
摘要:本文利用UG的强大建模能力,以及装配干涉分析、动态运动仿真和应力应变有限元分析等功能,建立了四缸发动机曲轴与连杆的三维模型,进行数字化样机设计,并结合运动公式计算,得出发动机曲轴和连杆的运动曲线分析图,以及活塞和曲轴在模态下的数据变化图谱、特征数据曲线和运动规律。通过对数据的分析,掌握了连杆机构在实际运行工况下的力学特性。通过数值分析与计算,可以直观清晰地了解曲柄连杆机构在运行过程中的受力状态。通过数据调整,对机构进行了优化,为发动机性能优化提供数据支撑。针对不同大小和功能发动机的优化分析,提供了更为准确的参考数据。
关键词:曲轴;连杆;有限元分析;运动仿真;UG
0.引言
曲柄连杆机构的原理,是将活塞的上下周期往复运动转化为曲轴的旋转运动,曲轴的运动通过飞轮盘产生转矩驱动汽车。曲柄连杆机构是发动机的主要部件,其工作可靠性与稳定性决定了发动机工作的可靠性与稳定性。随着汽车业的不断求新、求稳和智能化发展,发动机技术也在不断发展,曲柄连杆机构的工作条件更加复杂,要求更多,智能化程度也越来越高,追求速度与革新的程度也越来越好。如何在周期性的、变化的驱动作用下,既保证机构具有足够的运转速度,又满足疲劳强度和摩擦系数的要求,同事确保材质刚度和良好的动静态力学特性,这对曲柄连杆机构的总体设计与结构优化提出了更高的要求。
1 机构方案的数据
1.1了解结构,进行优化
首先要先了解机构的结构,通过软件来优化设计方案,从而确定产品结构尺寸优化和有限元分析在模态状态下曲轴的变化。对曲轴与连杆进行运动学和动力学分析,并选取曲轴与连杆的材料。用UG软件进行三维建模,以展示曲轴与连杆的结构,其由活塞、连杆、曲轴和嵌套等构件组成,如图1所示。

图1 曲柄连杆机构爆炸图
作为常见机构,存在大量资料说明,本文大概带过。笔者主要从机构的运动状态和数据分析入手,来掌握连杆的核心原理,为进一步的优化提供数据支撑。
1.2曲柄连杆机构受力分析
1.2.1曲柄连杆机构运动学分析
首先进行曲柄连杆机构的二维运动学分析,本文后面将通过三维运动仿真再进行数据展示。
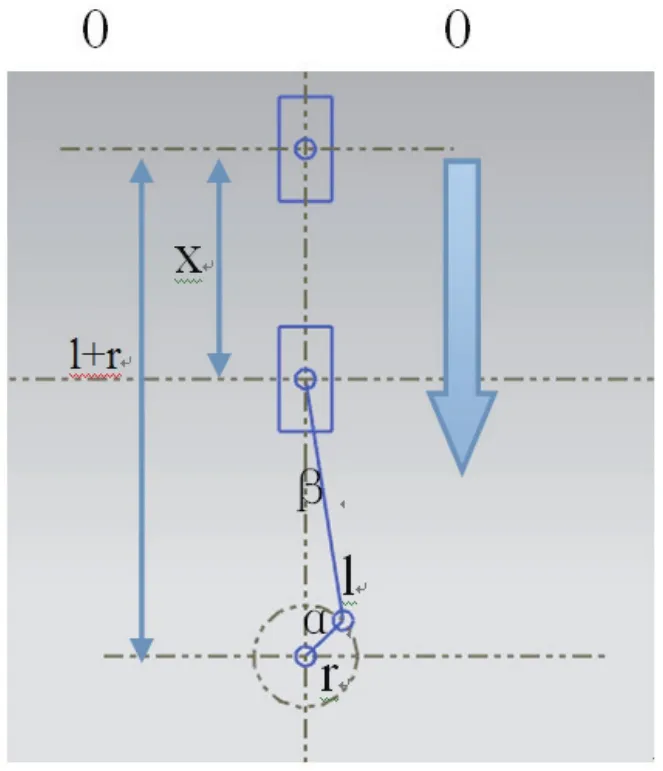
图2 曲柄连杆机构运动简图
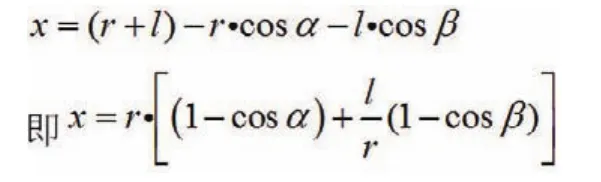
借助二维图,通过公式可以得到活塞的一些参数设置。先以活塞的静止点开始计算,如图2所示,由公式可得:
其中,r参数是曲柄的半径,l参数是曲柄连杆两端的中心距离,α参数是曲柄拐转角,β参数是连杆的摆角。令:

并且又有:

则:
从公式计算所得,活塞位移近似为:

λ为机构参数“连杆比”,通过公式可知,“连杆比”越大,也就是连杆较短,摆动角会发生相应的改变,导致发动机整体高度相应减小,同时使活塞的加速度和连杆摆角增大,相应地导致连杆往复运动中的惯性力与活塞的侧向推力增大。所以应在优化设计时,考虑连杆的大小、尺寸和摆角等因素。
通过公式可以在优化设计中作为参考主体。
从另一个角度,即活塞位移的变化,对时间求导方程。

将公式2-3关于时间求导,得到:

代入上式,令曲轴角速度:
则有:

将式2-5对时间求导,得:

由此得出,活塞的平均速度为

将式(2-7)对时间求导,得到:

将式(2-6)代入上式,得到:

将式(2-8)对时间求导,得到:

通过公式推导计算,可以了解曲轴和连杆在优化设计方面的部分因素。
(1)活塞位移:活塞关键上、下止点附近位移变化缓慢。实际确定上止点位置时,一般先确定某一活塞位置(90℃A左右),在上止点前后测量对应这一活塞位移的曲轴转角范围,除以二就是上止点位置。由此还可以得知活塞位置点的一些参数数据。
(2)活塞速度:在0~90℃和270~360℃区间,活塞速度会分别出现正极值和负极值,这就是活塞的速度范围。
(3)活塞加速度:在上止点前后,活塞加速度是正值,方向是活塞下行的方向,往复惯性力朝上;在下止点前后,活塞加速度是负值,方向是活塞上行的方向,往复惯性力朝下。根据极值方法求解,可得:

由于|cos|<1,第三个加速度极值只能在λ>1/4时才出现。
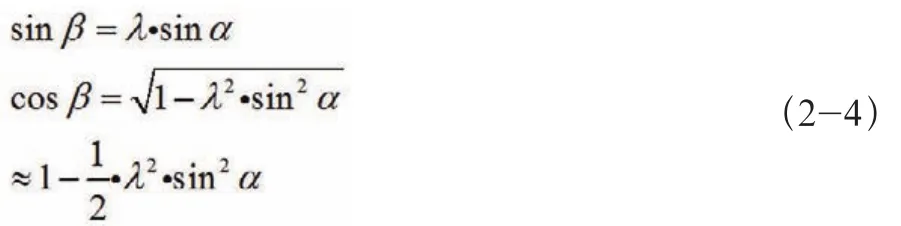
连杆的运动是组合了活塞往复直线运动和绕活塞销摆动两种运动,即平面往复运动。活塞绕活塞销摆动的角位移β,从连杆与气缸中心线重合开始计算,在α=0~180℃范围内,β为正值,α=180~360℃范围内,β为负值。
由式(2-3)可知:

其极限值:
βe=±arcsinλ
角速度:
角速度极值:
ωle=±ω·λ
角加速度:

化简后得到:
角加速度极值:
1.2.2部件的受力分析
当Pg>P0时,Pg为正值,其作用方向是活塞下行方向。
若Pg与P0以bar为单位,Fh以cm2为单位,则有:

通过上述分析和了解,曲柄连杆机构中的作用力应从以下三个方面讨论。
(1)当作用力加在活塞的时候,活塞变速、往复直线运动产生的往复惯性力;
(2)曲柄部分不平衡回转质量所产生的离心惯性力;
(3)连杆摆动所产生的惯性力。
活塞组件包括活塞、活塞环、活塞销和卡环。将活塞、活塞环和卡环三者的质量总和作为mh,则此三件的惯性力为:

此惯性力作用于活塞销上,并通过活塞销作用于连杆,进而传递到曲轴和机体。
活塞销的质量为mhx,其惯性力为:

此惯性力作用于连杆小头上,并通过连杆作用于曲轴,再传到机体。
在进行曲柄连杆机构总体受力分析时,考虑整个活塞组件的往复惯性力:

当活塞加速度j为正值,往复惯性力为负值,方向向上;j为负值,往复惯性力为正值,方向向下。因此,与气体作用力方向一致。
曲轴上曲柄不平衡部分的质量分为两部分。
(1)曲柄销部分:

(2)曲柄臂部分:

整个曲拐的旋转惯性力是:

定义“曲拐当量质量”为:
如果曲拐的某一曲柄臂上设有平衡重,其质量为mp,而其质心距曲轴轴线的距离为 ,则平衡重的旋转惯性力为:

定义“平衡重当量质量”为:

曲轴连杆的惯性力有2种,即:
(2)因向心加速度产生的惯性力,此力通过连杆质心C。
从公式定律来看,这些参数都是影响连杆性能的重要参数,可以调节这些参数达到性能优化的目的。
2 建模、装配及各零部件的材质属性、数据参数
关于连杆曲轴的建模,有大量文献参考,本文不赘述,仅展示连杆曲轴的部分特性。
2.1首先进行零件建模
利用UG进行草图设计,并生成三维模型,最进行装配和工程图的设计。
草图设计中相关尺寸的选择,为零件参数化设计奠定了基础。在草图基础上,利用UG的特征建模(拉伸、打孔和旋转等)得到零件的三维模型,并给零件材质赋值,为后续的BOM表输出、物理特性分析和有限元仿真分析做铺垫。
2.1.1连杆零件图(如图3所示)
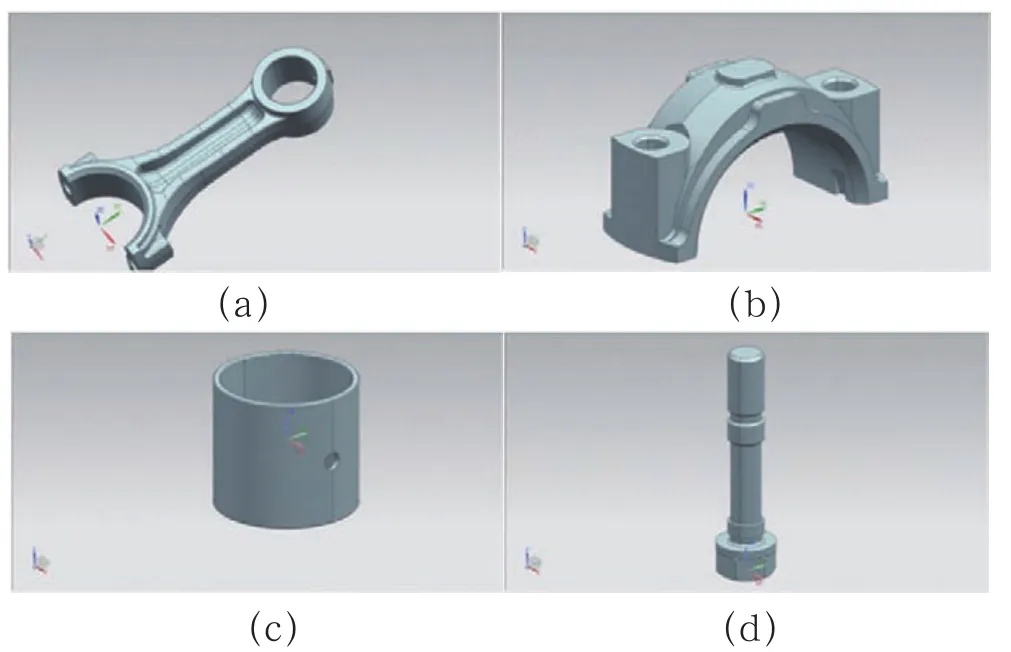
图3 连杆零件图(a为连杆,b为连杆盖,c为连杆衬套,d为连杆螺钉)
连杆均用30CrMo调质钢,真空热处理(850℃,40min保温时间,真空度为10Pa)。
2.1.2曲轴零件图(如图4所示)

图4 曲轴零件图
曲轴采用40Cr,抗拉强度为930MPa,屈服强度为785MPa。
2.1.3活塞零件图(如图5所示)

图5 活塞零件图
活塞采用铝合金材料,活塞顶部使用三氧化二铝材料对表面进行等离子喷涂,结合强度为55MPa左右,也可以使用TiAl基复合材料。活塞环槽表面镀Cr,活塞裙部镀Sn。
2.2零件的装配图(如图6所示)
本案例采用混合装配,即根据装配设计的需要,将自底向上装配和自顶向下装配混合使用。然后将零件组装起来,并利用装配分析干涉等手段判断零件相关尺寸的合理性。
零件装配依靠UG的装配约束进行(匹配、对齐、同心、平行和中心等约束)。先进行连杆子装配,包括连杆、螺栓、轴瓦和端盖等部件,再将连杆与活塞进行装配,包含销钉、活塞和连杆子装配等部件。
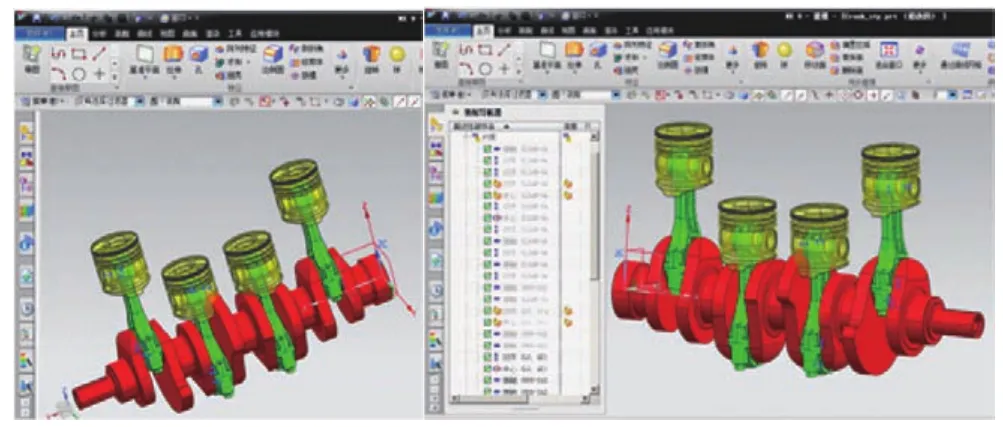
图6 装配图与装配约束关系图
2.3 部件工程图(如图7、图8所示)
工程中反应产品的关键尺寸的数据,这样为合理得知产品数据提供一下数据参数支持。
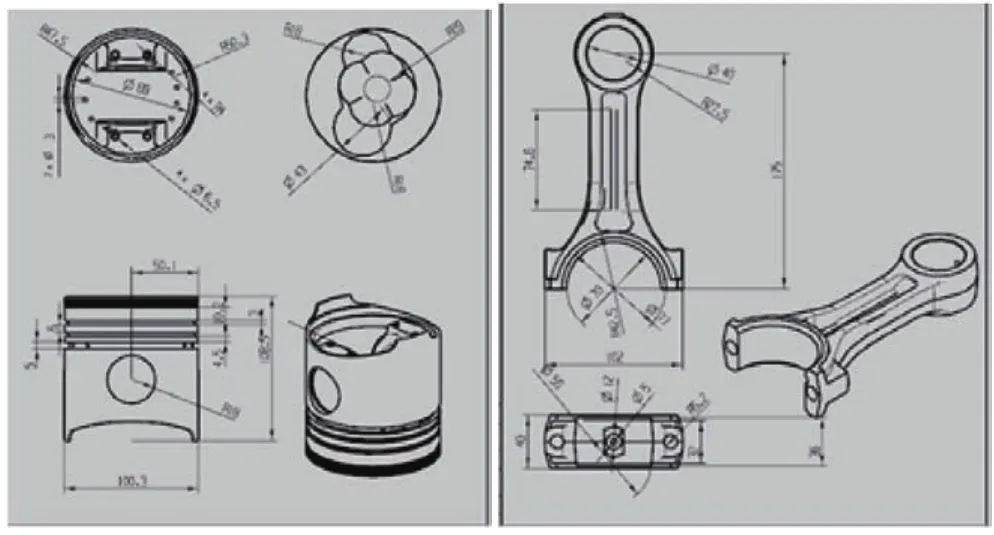
图7 活塞零件工程图图 8连杆零件工程
3 运动仿真与分析
运动仿真的过程本文不再赘述,笔者主要对运动仿真的结果进行一些分析,从而为优化零件设计奠定基础。
3.1运动机构的设置
首先要了解机构运动的原理及需要设定的运动副情况,并进行运动仿真。对每个零件连杆赋值,并在仿真之前赋予各个部件一定的运动学特性。由于前面的装配与仿真经过了转换,对不同连杆赋值为不同的运动副(旋转副、滑动副和同轴副等),再通过运动函数内的STEP函数,对不同时间、不同状态进行赋值操作,这样可以对其质量、惯性矩、初始移动速度和初始转动速度进行定义。如图9所示。
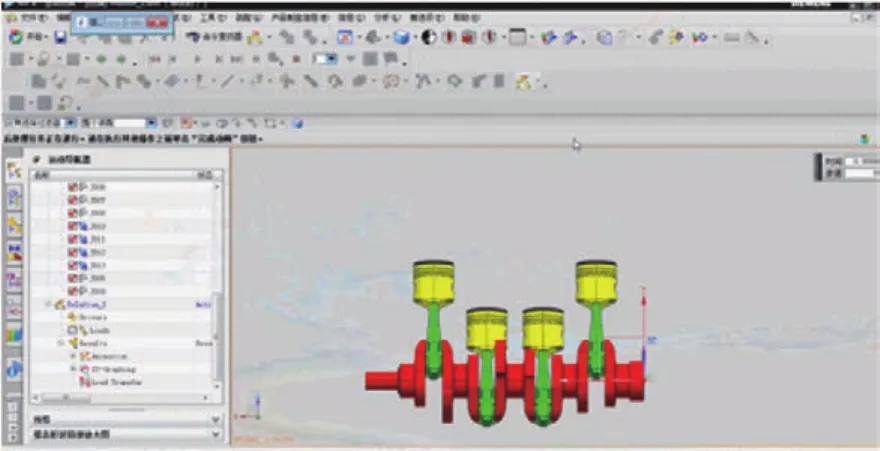
图9 运动仿真
3.2仿真机构结果输出
通过对主模型进行运动仿真,可得到活塞的运动图表,包括活塞在不同时间段的位移图,如图10所示,活塞的总位移成余弦规律,平稳上下运动。仿真过程中生成一组数据表,可以获取一些运动信息。期表示随着仿真步数的变化,部件所消耗的时间,以及零件的旋转角度等。我们还可生成运动信息图表,以及在运动过程中曲轴的扭转力变化图谱,如图11所示。
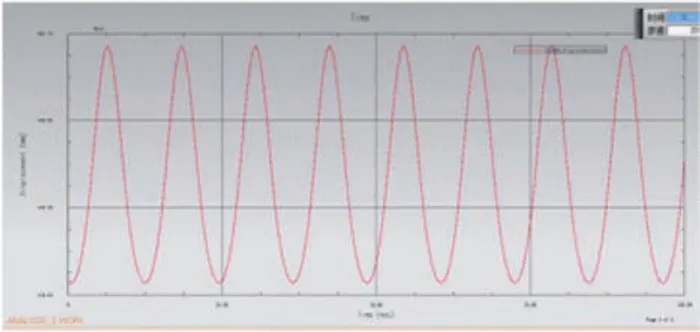
图10 活塞运动位移变化曲线图

图11 扭转力变化曲线图
通过运动仿真,我们还可以得到机构的一些运动信息。改变曲轴的速度和相关的机构参数,相应地改变设计结果,以便于调整产品机构的运动特性,并得到优化的数据分析报告,如图12所示。设计的更改可以反映在装配主模型的复制分析方案中,再重新分析,通过不断地分析数据表,得出最后的设计方案,为实际产品提供准确的数据依据。

图12 不同时段的载荷变化表
通过对位移的分析,可以确定构件运动所需的空间及行程,考察构件或构件上的某点能否实现预定位置变化的要求。通过对速度的分析,可以确定机构中从动件的速度变化是否满足工作要求,得出准确的理论数据和曲线,如图13所示,有效地分析机构运动过程中的运动特性和规律,为结构设计及优化提供理论基础。
活塞的速度变化快慢是速度的导数,因此与速度曲线的变化规律基本一致,可以看出,活塞的加速度曲线成正弦规律,仍然具有周期性变化规律。如图14所示。
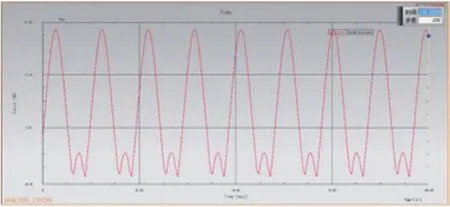
图13 活塞受力幅度变化图
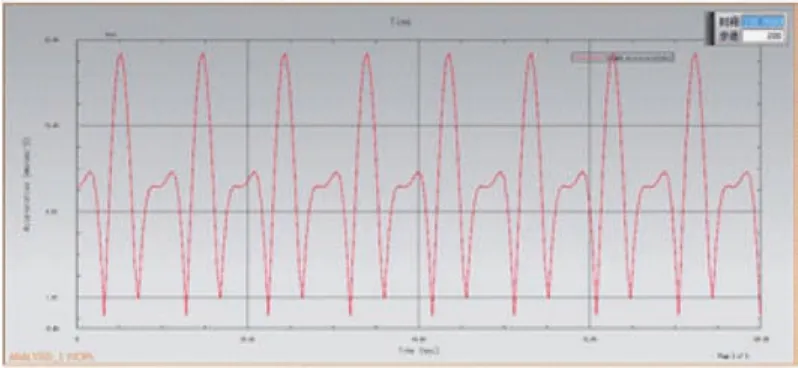
图14 活塞加速度曲线图
从各类数据表和图谱中,我们得到了连杆、曲轴和活塞等部件的位移、速度和加速度信息。通过改变相关的机构参数,可以得到不同的设计结果,并对机构的运动特性进行控制。设计更改可以反映在装配主模型的复制分析方案中,通过优化数据,得到最佳设计结果,凭借UG运动分析模块可以对机构进行过程模拟,为进一步分析产品的变化数据奠定基础,对缩短产品开发周期,优化产品性能,提高设计质量有着相当重要的的作用。
4 有限元分析
本文所述及部件的材料属性如图15,包含杨氏模量、质量密度、屈服强度和抗拉强度等参数。
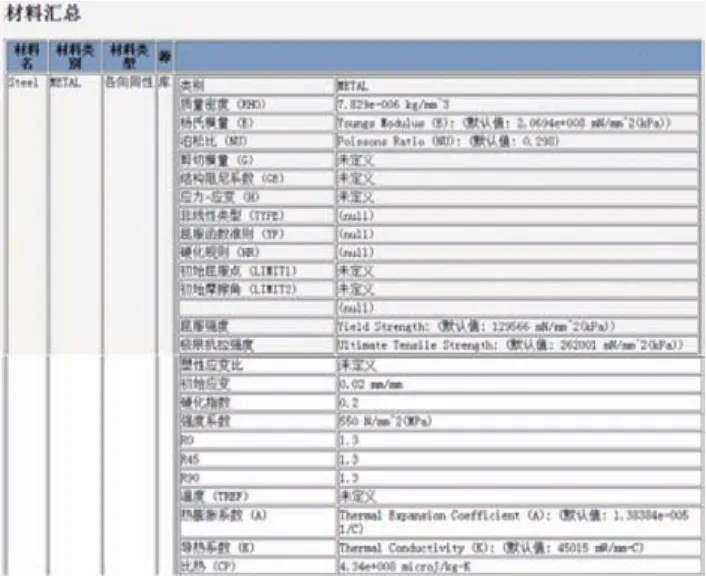
图15 材料属性一览表
材质赋值后,对产品进行模型简化,把不影响分析结构的特征简化掉,对零件减小同步建模处理,再进行网格划分。然后,设置连杆载荷,并进行有限元分析计算。
解算分别得到变形条纹图、变形曲线和变形线框图。如图16、17、18所示。
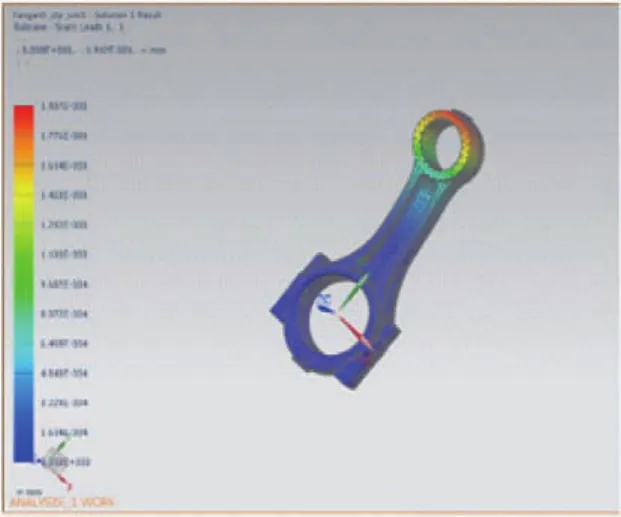
图16 连杆位移情况

图17 装配件接触分析变化图
图18 装配件扭转变化图
5 结语
本文利用三维设计软件的草图和实体建模功能,对四缸发动机的曲轴、连杆和活塞等相关部件进行建模,并在装配条件约束下进行混合装配,对尺寸进行一系列的优化调整,完成工程图。随后进行运动学和动力学的初步仿真分析,获得相关数据,以便更加形象、深入地了解其运动方式。最后对整个部件进行有限元分析和优化,基于数据建立完整的产品数字化样机。
收稿日期:2015-11-12
