弹载记录仪回收无线电定位系统
2016-03-29申玉玲李新娥闫宏彪丁永红尤文斌崔丽丽
申玉玲,谢 锐,李新娥,闫宏彪,丁永红,尤文斌,崔丽丽
(1.中北大学仪器科学与动态测试教育部重点实验室,山西太原030051;2.中北大学电子测试技术国家重点实验室,山西太原030051)
弹载记录仪回收无线电定位系统
申玉玲1,2,谢锐1,2,李新娥1,2,闫宏彪1,2,丁永红1,2,尤文斌1,2,崔丽丽1,2
(1.中北大学仪器科学与动态测试教育部重点实验室,山西太原030051;2.中北大学电子测试技术国家重点实验室,山西太原030051)
摘要:针对现有弹载记录仪回收方法存在的效率低、功耗大等不足,设计应用于弹载记录仪回收的新型低功耗无线电搜寻定位系统。该无线电搜寻定位系统搭载于无人机,主要由无线通信模块、GPS定位模块、Flash存储模块、中央控制模块等构成。载有信标装置的弹载记录仪着地后,无线通信模块接收信标发射的无线电波,GPS定位模块定位无人机对应坐标,中央控制模块将无线电信号强度值和对应GPS坐标存储于Flash芯片,无人机工作一定时间后返回,上位机读取存储信息,利用RSSI定位算法和三边测量方法估算信标位置,从而快速回收弹载记录仪。通过定点模拟试验验证该定位系统的可实现性,为以后的弹载记录仪回收提供有效的方法。
关键词:无线电;弹载记录仪回收;RSSI定位算法;三边测量方法
0 引言
随着存储测试技术的迅速发展,记录仪广泛应用于航空航天以及军事领域[1]。弹载记录仪能够有效存储导弹、飞行器导弹发射及飞行过程的各项参数,如飞行高度、速度、加速度、运行轨迹等信息,所以记录仪的研究对航空航天事业尤为重要[2]。然而弹载记录仪试验后落地范围大多是沙漠、戈壁等复杂环境,使得人工搜寻成本高、时间长、工程进度慢[3]。目前搜寻弹载记录仪主要技术手段有颜色指示、气味识别、光学指示等,但其实质还是依靠人力进行搜寻。现阶段的无线电依靠GPS/北斗卫星、GPRS等进行定位、实时监控,但弹载记录仪体积及功耗成为制约其发展的因素[4-5]。
无人机外形结构简单、造价低廉,可在空中长时间飞行等优点使其广泛应用于军事及民用领域[6]。另外,无线电信号抗干扰能力强,其定位技术准确度高、可靠性强、使用方便,也得到广泛应用[7]。
所以,针对现有弹载记录仪回收方法存在的效率低、功耗大等不足,本文设计了一种新型低功耗的基于无人机的无线电搜寻定位系统。
1 系统设计方案
1.1系统组成
应用于弹载记录仪回收的无线电搜寻定位系统由无线通信模块、GPS定位模块、Flash存储单元、中央控制单元、电源管理模块等组成,其构成框图如图1所示。无线通信模块主要与信标装置进行通信,接收信标装置发射的特定频率信号,并传给中央控制单元;GPS定位模块定位无人机位置坐标信息;中央控制单元是系统核心部分,负责控制系统中各模块间的协调工作;Flash存储单元将接收的信号强度值和对应无人机的GPS坐标信息存储起来;电源管理模块有效配置系统电源,给系统各单元有效提供电压。
1.2系统工作流程
系统工作流程为:1)弹载记录仪落地后,与其共用壳体的信标装置进入信号发射模式,持续工作3 min后进入低功耗休眠模式,休眠15s后再次进入发射模式,如此循环;2)搭载于无人机的无线通信模块进入接收模式,开始搜寻并接收信标信号,GPS定位模块时刻定位无人机位置坐标,搜寻定位系统的控制单元将接收的无线电信号强度和相对应无人机GPS信息存储于Flash存储模块;3)无人机工作完成后返回,上位机通过RS232串口读取存储模块的信号强度值和相应GPS信息,利用合适的定位算法进行信标发射信号位置解算,从而估算出信标装置位置,即弹载记录仪位置。
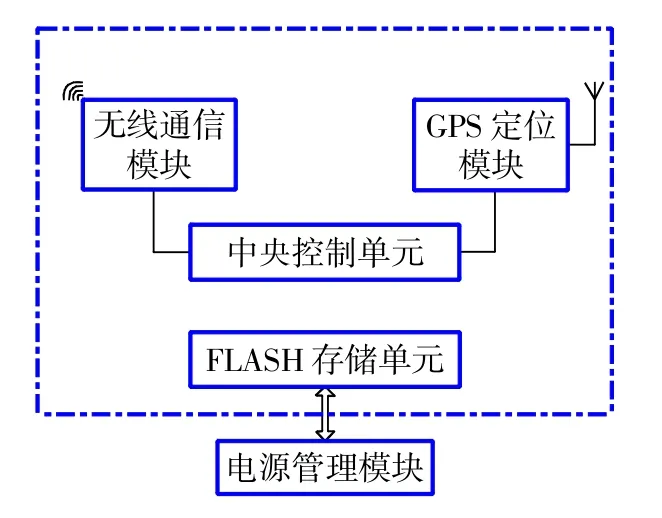
图1 系统组成框图
2 无线电定位原理
2.1无线电定位方式
通过无线电波的发射与接收,测量目标相对于发射台的方向、距离等定位参量,估计目标位置的过程称为无线电定位过程[8],如图2所示。
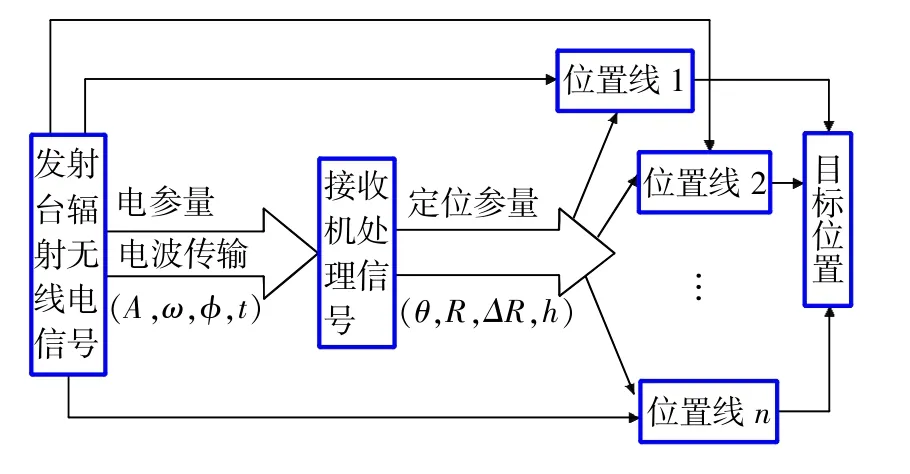
图2 无线电定位过程结构图
无线电定位方式主要有两种:1)借助GPS定位方式,就是在待测目标上装有GPS定位模块,并将自身GPS位置信息发送给定位接收机进行定位;2)基于基站定位方式,就是利用定位算法解析发射电波特征值以及位置信息来定位。根据信号特征值不同,定位算法包括单点测量定位(SM)、到达角度(AOA)、到达时间(TOA)、到达时间差(TDOA)、基于信号强度(RSSI)等。
2.2RSSI定位算法
无线电波依靠介质在空间传播,然而实际环境中有高山、楼房等障碍物,情况复杂,所以无线电的传播过程中会有不同程度的损耗。
对数-距离路径损耗模型信号传播的衰减模型[9]为

式中:RSSI(d)——接收节点d处接收的信号强度值,dB;
RSSI(d0)——参考节点d0处接收到的信号强度值,dB;
β——路径损耗因子;
δ——均值为零的高斯分布的随机噪声值。
2.3三边测量定位原理
如图3所示,O1、O2、O3为位置已知的3个接收节点,每个节点根据接收到的信号强度值可以计算出自身与信标发射节点距离。设3个节点计算的距离分别为d1、d2、d3,然后以O1、O2、O3为圆心,d1、d2、d3为半径分别作圆。
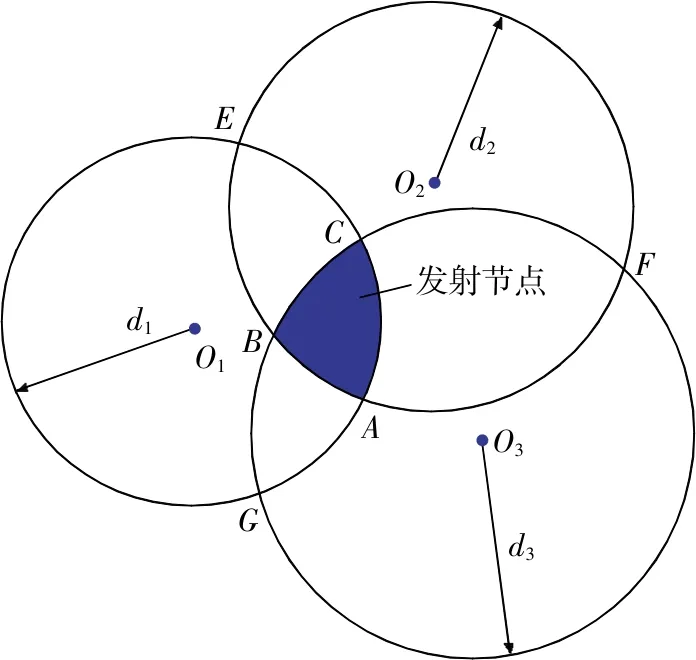
图3 三边测量定位原理图
已知接收节点位置信息,选择恰当原点并建立直接坐标系。假设图3中接收节点的位置坐标分别为O1(x1,y1)、O2(x2,y2)、O3(x3,y3),未知的发射节点位置坐标为M(x,y),根据计算距离的公式则可以得到以下非线性方程组:
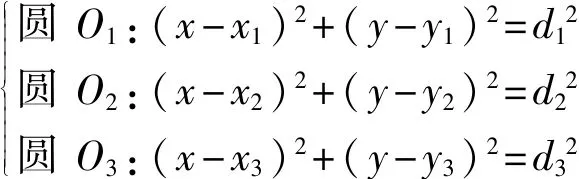
如图3所示,3个圆两两相交,设圆O1、O2的交点为A、E,圆O2、O3交点为B、F,圆O1、O3的交点为C、G,A、B、C为公共三角区域(即图中黑色区域)的3个顶点。通过3个圆两两建立方程组,即可求得6个交点坐标。
O1、O2、O33个接收节点位置信息可以通过无人机上GPS定位模块获得,d1、d2、d33个距离值通过无人机上无线通信模块接收的信号强度,并利用RSSI定位算法计算得到。
3 定点模拟试验
3.1试验过程
设定一个模拟的定位搜索环境,将搜寻定位系统架设在一定高度以模拟无人机的飞行高度。搜寻定位系统与信标装置处的测试人员持对讲机进行系统模拟试验。信标装置处测试人员先启动信标装置,然后观察信标装置上的状态指示灯,信标装置处于正常工作状态后开始模拟试验,试验过程为:
1)首先确定信标装置GPS坐标和搜寻定位系统所在位置对应的GPS坐标。
2)信标装置开启正常工作后,信标装置处测试人员利用对讲机将信息传给搜寻定位系统处的测试人员,搜寻人员开启搜寻定位系统。
3)观测搜寻定位系统的工作状态指示灯情况。回收搜寻定位系统后,读取系统存储的GPS位置信息和接收到的信标装置发送的特定频率无线电信号强度值,计算机软件利用这些信息将信标装置的位置计算出来,将读出的数据与试验开始时测得的搜寻定位系统GPS坐标进行比较。经过定位算法估算后的坐标与信标装置处的GPS位置信息进行对比。
3.2数据处理
开始时测得选定的3点GPS位置信息分别为(38°1.043'N,112°26.946'E)、(38°1.033'N,112°26.916'E)、(38°1.063'N,112°26.956'E),信标装置位置信息为(38°0.032'N,112°26.846'E)。回收搜寻定位系统后读取数据,每个定点采集5个数据,无线电信号强度取均值。
将上述数据代入无线电传播模型,应用RSSI定位算法估算出的信标装置位置为(38°0.043'N,112°26.936'E)。
试验数据表明搜寻定位系统GPS的存储信息与实际位置信息一致,定位估算的信标装置坐标与实际坐标偏差约为350m。
4 系统参数对定位误差影响分析
4.1信标发射周期
信标装置安装于弹载记录仪内部,依靠电池供电,其功耗不可忽视。所以弹载记录仪落地后信标装置间断地向外发射无线电波,无人机搭载的搜寻定位系统在空中飞行并接收该周期信号,图4为信标发射周期与系统定位误差关系曲线。
从图中可以看出,定位误差随信标发射周期的增大而降低,然后逐渐趋于一个定值。当信标发射周期较小时,无人机搜寻定位系统确定的几个接收节点间距较小、分布密集,所以算法误差较大,对未知信标节点的定位误差就较大;当信标发射周期增大时,无人机搜寻定位系统确定的几个接收节点间距变大、分布相对较均匀,对未知信标节点的定位误差就会减小并逐渐趋于稳定。
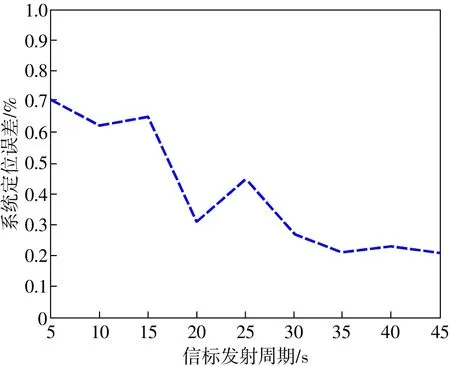
图4 信标发射周期对系统定位误差影响
4.2RSSI取值
由于无人机搭载的搜寻定位系统接收的信号强度值受环境影响和天线角度影响较大,所以测得的RSSI值具有随机性。为了减小随机性给测量精度带来的影响,可以在同一个接收节点,多次搜集该点接收的信号强度值,然后取这些信号强度的平均值。图5为接收信号强度RSSI的一次取值和多次取值然后平均对系统定位误差影响的比较。从图中可以看出,取RSSI的平均值可以有效防止随机性、降低系统定位误差,并且测量距离越远,误差越大。
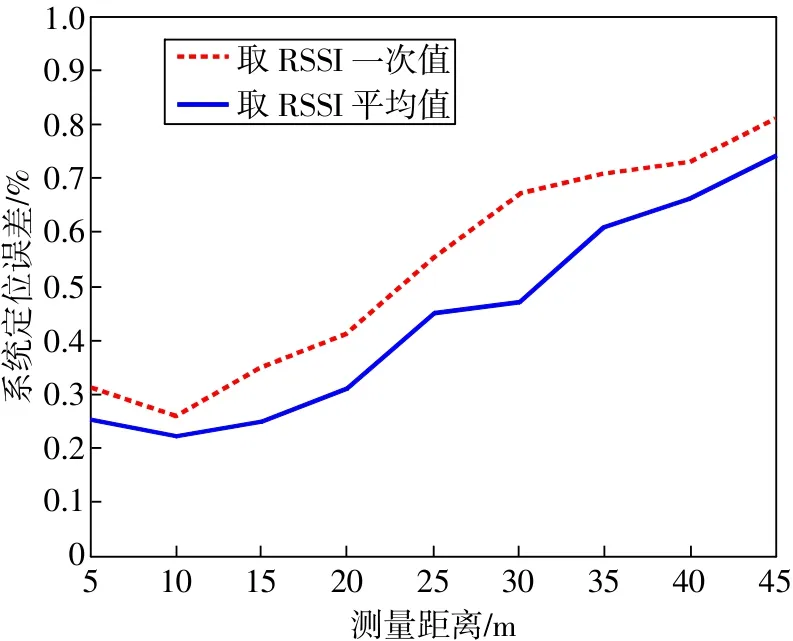
图5 RSSI取值对系统定位误差的影响
4.3无人机飞行速度
带有无线通信模块和GPS定位模块的搜寻定位系统搭载于无人机上,无人机以一定的高度在空中飞行采集信标发射的无线电信号和GPS位置信息。无人机的飞行速度影响其确定的接收节点位置分布以及个数,进而影响系统定位误差,如图6所示。
当飞行速度很低时,采集的接收节点分布密集,定位误差较大;当飞行速度逐渐变大时,采集的接收节点分布均匀,定位误差区域稳定且较小;当飞行速度太快时,采集的接收节点个数很少,彼此距离太远,定位误差反而变大。
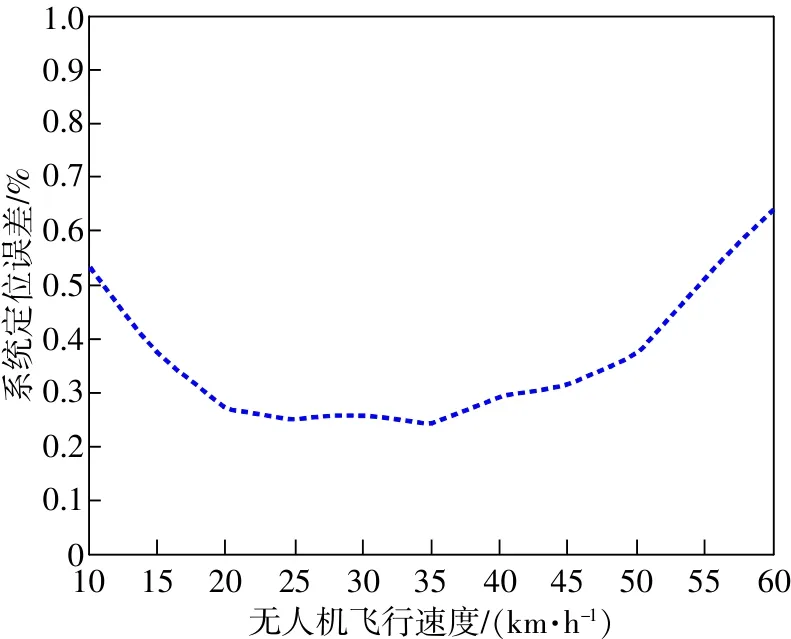
图6 无人机飞行速度对系统定位误差影响
5 结束语
本文设计了应用于弹载记录仪回收的无人机无线电搜寻定位系统。该系统可有效减小弹载记录仪信标体积、降低信标功耗,能有效缩小记录仪搜寻范围,定位效果良好,并能快速回收弹载记录仪。定点模拟试验验证了系统高效的定位性能,为以后记录仪搜寻提供了有效的新方法。
不同环境下系统性能测试、减小系统误差以及系统的实际应用是下一步主要研究工作。
参考文献
[1]祖静,申湘南,张文栋.存储测试技术[J].兵工学报,1994,11 (8):31-35.
[2]刘建伟,裴东兴,尤文斌,等.回收式固态弹载记录仪抗高冲击设计[J].传感技术学报,2012,25(8):1045-1048.
[3]王伟.基于无线电测向技术的弹载记录仪信标研究[D].太原:中北大学,2014.
[4]周立锋,马海潮,杨军.基于测元融合的GPS与北斗二代定位算法研究[J].全球定位系统,2013,38(1):79-83.
[5]刘荣.基于GPS定位的微型轨迹记录仪的研制[D].北京:北京邮电大学,2013.
[6]朱华勇,牛铁峰,沈林成,等.无人机系统自主控制技术研究现状与发展趋势[J].国防科技大学学报,2010,32(3):115-120.
[7]周江,孙献璞.无线电定位技术在蜂窝通信中的应用及实现[J].通信技术,2003,136(4):66-70.
[8]白贵芳,原立格,属振.天线与电波传播解题指南[M].北京:清华大学出版社,2012:103-109.
[9] BADAWY O M,HASAN M A B. Decision tree approach to estimate user location in WLAN based on location fingerprinting [C]∥Radio Science Conference,2007. NRSC 2007. National IEEE,2007:1-10.
(编辑:莫婕)
Radio positioning system for missile borne recorder recovery
SHEN Yuling1,2,XIE Rui1,2,LI Xin’e1,2,YAN Hongbiao1,2,DING Yonghong1,2,YOU Wenbin1,2,CUI Lili1,2
(1. Key Laboratory of Instrumentation Science & Danamic Measurement,Ministry of Education China,North University of China,Taiyuan 030051,China;2. Science and Technology on Electric Test & Measurement Laboratory,North University of China,Taiyuan 030051,China)
Abstract:A new type of low -power radio searching and positioning system is designed for recovering missile-borne recorders. The system mounted on an unmanned aerial vehicle(UAV)is composed of a wireless communication module,a GPS positioning module,a FLASH memory module and a central control module. After the recorder with a beacon device is landed,the wireless communication module received the radio wave emitted by the beacon and the GPS positioning module located the UAV coordinates. Then,the central control module stored the radio signal strengths and their GPS coordinates in the Flash chip. After running a certain period of time,the UAV returned,and meantime the host computer begins to read the stored data. Next,the beacon position is estimated with RSSI positioning algorithm and three-edge measuring method so that the missile-borne recorder can quickly recovered. The fixed-point simulation test has verified the realization of the system and has provided a new approach for reusing missile borne recorders.
Keywords:radio;missile borne recorder recovery;RSSI positioning algorithm;three edge measuring method
作者简介:申玉玲(1991-),女,山西长治市人,硕士研究生,专业方向为动态测试与智能仪器。
收稿日期:2015-08-27;收到修改稿日期:2015-09-20
doi:10.11857/j.issn.1674-5124.2016.01.019
文献标志码:A
文章编号:1674-5124(2016)01-0083-04
