一种风力摆系统的设计
2016-03-25唐晨光
唐晨光

摘要:文章介绍了风力摆控制系统的设计与制作。系统以STM32为主控芯片,通过角度传感器MPU6050将三维数据传给单片机,单片机输出相应的PWM方波,通过电机驱动模块BTN7961控制轴流风机的风力大小,从而实现对风力摆控制系统的控制。根据风力摆的数学模型分析,确定了万向节和摆杆之间的PID控制算法,并在实验中优化控制参数。经反复试验,证明该系统实现了设计的要求。
关键词:STM32F103RCT6;角度传感器;电机驱动模块BTN7961;轴流风机
1 总体设计方案
1.1 系统总体设计
本系统硬件包括主控芯片STM32、角度传感器MPU6050、电机驱动模块BTN7961、摆杆、万向节及支架。该系统采用STM32开发板作为主控模块,STM32单片机通过读取角度传感器MPU8060的三维角度数据从而判断摆杆的偏摆方向和角度,通过PID控制算法计算后,输出相应的PWM控制信号给电机驱动模块,控制轴流风机风速,从而使摆杆达到相应的运动状态和位置。
1.2 主控芯片的选择
方案1:采用入门级51或者AVR、PIC等流行已久的8位MCU作主控。价格低廉,资料众多,但功能有限,计算能力有限。
方案2:采用STM32系列的STM32F103RCT6。风力摆控制系统要求处理器具有足够的内存、闪存和快速的信号采集能力,因此,本文选用手头现有的集成仿真器,方便软件仿真调试,板上为STM32F103RCT6单片机,该单片机超低功耗,运算速度快,性价比高。
1.3 电机驱动器的选择
本设计采用BTN796IB集成专用驱动模块。BTS7960是专门针对电机驱动的,具有大电流输出的半桥式驱动芯片,它内部自带一个P型的高边MOSFET,同时自带N型的低边MOSFET,外加一个独立驱动的集成芯片。P型的MOSFET因为自带开关而省略了电荷泵电路,故大幅度减小了EMI。内部自带的驱动电路具有电流诊断、逻辑电平输入、死区产生电路、斜率调整电路,同时具备过温度、过电压、欠电压、过电流和故障短路保护的功能。其内部2个MOSFET且有低至16mQ通态电阻,最大驱动电流高达43A。
故综上所述,考虑经济以及驱动电流在4A以上等综合因素,本文选择使用BTN796IB模块驱动。
1.4 角度传感器的选择
这里,本文采用角度检测专用芯片MPU6050。它具备角速度的全格感测,范围可达±250°/sec,±500°/sec,±1000°/sec和±2000°/sec,这种精确度可保证其准确跟踪快速和慢速的转动。此外,可自编程控制的加速器亦具备全格感测,范围可达±2g,±4g,±8g及±16g。该产品的信号传输可穿透最高达400kHz的厚膜集成电路,以及最高达20M的SPI。MPU6050可工作于不同电压下(2.7-5.5V),其VDD端可接受2.5V,3.Ov或3.3V(±5%)的供电电压,10逻辑接口的供电电压为1.8V±5%(MPU6050仅使用VDD)。MPU6050的封装尺寸为4X4X0.9mm(QFN),这在业内是具备极强竞争力的尺寸。除此之外,它还包含以下主要特征:内置的温度感测器,工作环境中频率只有±1%波动的内部振荡器。不仅如此,尺寸小,精度高,功耗低,经济实惠,运用成熟。
结合所学的知识点和经济实惠的角度,以及平常对MPU6050角度传感器接触较多,本文最终选用了MPU6050。
1.5 控制算法的选取
众所周知,PID控制算法是针对过程控制的被控变量的,其规律是按偏差或偏差率的比例、积分和微分进行控制的一种调节器(简称PID调节器),它是工程中应用最为广泛的一种控制算法。这种算法原理简单,方便实现,适用对象广,控制参数不需要解耦,控制参数的设定相对简单等。而且通过理论足以证明,对于过程控制中典型的一阶滞后+纯滞后对象、二阶滞后+纯滞后对象,PID控制算法属于最优控制算法。PID调节器是针对单变量连续系统的动态品质而采取的—种有效的校正方法,具有参数整定方式简单、参数(PI,PD)改变灵活的特点。
由于笔者对PID比较熟悉,运用比较多,故选择了PID控制算法。
2 理论分析计算
2.1 电动机选型
方案1:选用台湾三巨电机有限公司的SJ8025HD2,12V的直流电机,输入电流0.4A,转速3000转(r/min)。风力强劲,性价比高,市场使用普遍,资料较多,使用方便,便于购买。
方案2:选用台达9038 12V 4.5A 9CM暴力大风量增压机箱风扇,转速高达7900转,电机工作电压:10.8-13V,电机标称电流:4.5A,电机功率:54W,耐电压:汇漏电流0.5mA500/lmin。性价比极高,方便购买,资料充足。
因此综上所述,本文选择了台达的9038。电压、尺寸都满足要求,输出电流大,风力强劲,质量较轻。
2.2 摆杆状态检测
在本设计中,摆杆的角度测量所用的部件为角度传感器MPU6050。摆杆的一端固定在万向节上,另一端固定在轴流风机上。将角度传感器放在轴流风机上方,可随摆杆的摆动而摆动,其可调端输出电压也会随之而变化。将角度传感器测得的三维数据传回单片机进行处理,从而得到摆动的角度。
2.3 控制算法
PID算法是比例微分、积分、控制器控制的过程。
2.3.1 比例系数Kp
比例系数Kp的值数决定了调节器调节过程的快慢,实际中Kp不易过大,不然容易导致控制系统的超调或振荡现象,Kp过小又起不到调节作用,比例控制无法消除余差。
2.3.2 积分调节系数Ti
积分作用可消除控制偏差,积分常数Ti的大小决定了积分作用强弱程度,积分作用通常使系统的稳定性下降。因此,积分常数Ti大小的选择要得当。
2.3.3 微分调节系数D
当偏差e瞬间波动过快时,微分调节器立即产生响应,抑制偏差的变化,使系统更趋于稳定,改善系统的动态性能。
3 硬件电路与程序设计
3.1 电源电设计
本文采用SDD-IOO开关电源,交流输入:220V±20%,直流输出5V/13A,12V/2A,-5V/IA,-12V。
3.2 电机驱动电路设计
在这个模块设计时,本文采用BTN796IB集成专用驱动模块。BTS7960是专门针对电机驱动的、具有大电流输出的半桥式驱动芯片,它内部自带一个P型的高边MOSFET,同时自带N型的低边MOSFET,外加一个独立驱动的集成芯片。P型的MOSFET因为自带开关而省略了电荷泵电路,故大幅度减小了EMI。内部自带的驱动电路具有电流诊断、逻辑电平输入、死区产生电路、斜率调整电路等功能,同时具备过温度、过电压、欠电压、过电流和故障短路保护的功能。其内部2个MOSFET具有低至16mQ通态电阻,最大驱动电流高达43A。BTS7960的Is引脚具有电流自动检测功能,当其工作在正常模式下,从该引脚检测到的电流与流经高边MOSFET的电流成正比,若Ris-lkQ,则Vis=lload/8.5;在故障条件下,从Is引脚流出的电流等于IIS (lim)(约4.5mA),最后的结果是:Is为高电平。
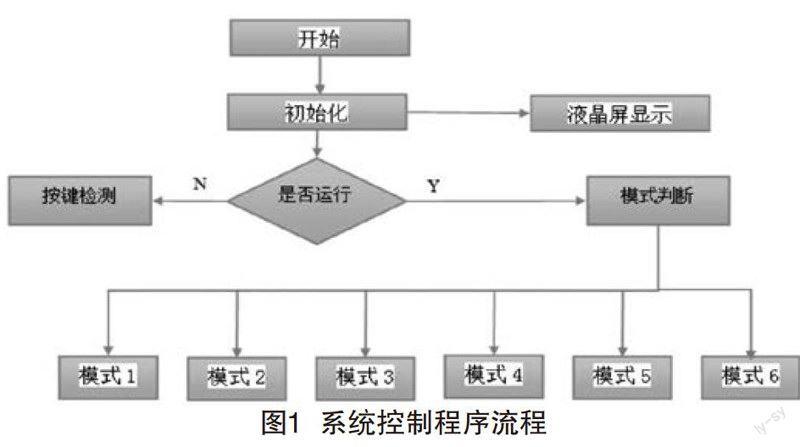
3.3 程序流程图(见图1)
4 测试与分析
本文采取如下方法对系统进行测试。测试针对设计任务中的每一个要求都进行测试,每个要求都测试5次,取其平均值最为最终数值。
(l)从静止开始,15s内控制风力摆做类似自由摆运动,使激光笔稳定地在地面画出一条长度不短于50cm的直线段,其线性度偏差不大于±2.5cm。如表1所示。
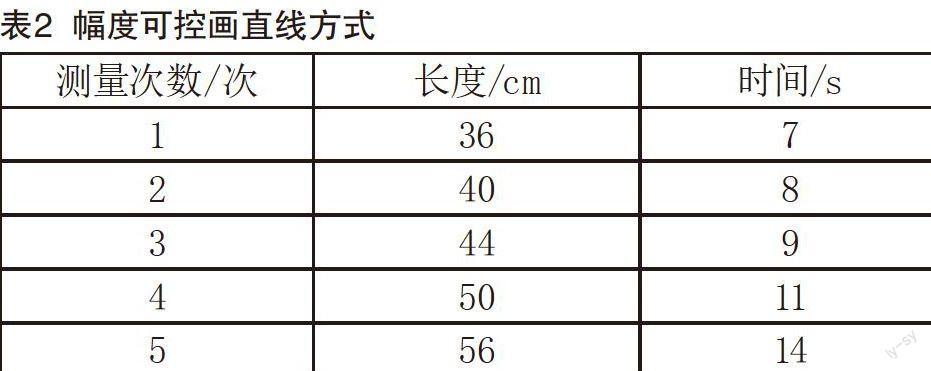
(2)从静止开始,15s内完成幅度可控的摆动,画出长度在30-60cm间可设置,长度偏差不大于±2.5cm的直线段,并且具有较好的重复性。如表2所示。
(3)设定摆动方向,风力摆从静止开始,15s内按照设置的方向(角度)摆动,画出不短于20cm的直线段。如表3所示。
(4)将风力摆拉起一定角度(30°~45°)放开,5s内使风力摆制动达到静止状态。如表4所示。