无人机警戒雷达仿真系统的建模与仿真*
2016-03-24张耀中张建东史国庆
张耀中,张建东,史国庆
(西北工业大学电子信息学院,西安 710129)
无人机警戒雷达仿真系统的建模与仿真*
张耀中,张建东,史国庆
(西北工业大学电子信息学院,西安710129)
摘要:针对海面静止和移动目标的探测、感知、识别、成像等问题,建立了由数据/控制接口、人机界面及多个算法模块组成的无人机警戒雷达仿真系统。系统采用模块化方法对目标运动特性、环境特性和警戒雷达的功能特性进行建模与仿真,主要用于模拟现实装备中此类载荷的基本功能,从数字化仿真层面实现了无人机警戒雷达载荷功能的再现与性能测试,并能完成与指挥控制台之间的信息交互,同时系统具有很好的可扩展性,可以作为整个作战仿真系统的一部分,嵌入到更复杂的作战仿真系统中。
关键词:警戒雷达,无人机,建模与仿真,RCS
0 引言
无人机对海预警雷达主要实现对海面静止和移动目标的探测、感知、识别、成像等功能,并能完成与指挥控制台之间的信息交互,即接收指挥控制台发送的导航数据和控制命令,将目标信息、战场态势信息等上传给指挥控制台进行数据分析。另外,无人机警戒雷达模拟器将系统中的动态数据实时地发送到数据显示模块进行显示,从而实现仿真人员对仿真系统的动态监控,并对仿真数据进行分析。随着无人机预警雷达在战争中的广泛应用,预警雷达仿真系统的建模与仿真实现成为作战仿真中的重要组成部分。下页图1所示为无人机警戒雷达仿真系统与指挥控制台之间的交联框图。
本文建立了不同工作模式下的对海警戒雷达模拟器的功能仿真模型,主要用于模拟实现现实装备中此类载荷的基本功能,即进行功能仿真,从数字化仿真层面实现无人机警戒雷达载荷功能再现、性能测试,同时也可以作为整个海空一体化作战仿真系统的一部分。
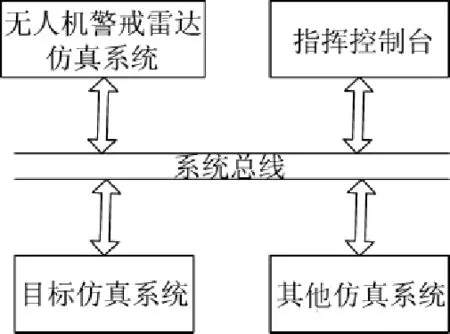
图1无人机警戒雷达仿真器与系统的交联框图
1 仿真系统总体设计
海空一体战中无人机警戒雷达系统的主要功能是:①具有对各型各类的海面舰船目标侦察监视能力,并将侦察结果上报给指挥控制中心;②具备接收指挥控制中心的遥控指令,执行对海面目标的探测、感知;③具备对指定目标的成像能力;④在复杂海杂波条件下,具备对海面运动目标的检测能力。系统的工作模式主要有海面广域搜索监视、海面运动目标检测、一维高分辨距离成像和正侧视合成孔径成像。
无人机警戒雷达仿真系统主要由数据/控制接口、人机界面和多个算法模块组成。算法模块主要包含环境特性模块、目标特性模块和雷达功能模块等。图2所示为仿真系统的顶层逻辑结构图。

图2仿真系统的顶层逻辑结构图
无人机警戒雷达仿真系统的各个模块之间并不是相互孤立的,模块和模块之间存在着信息上的交互,例如目标模拟模块向雷达功能模块提供目标距离和目标的RCS信息,向运动目标检测与显示模块提供目标的运动信息等;雷达功能模块向恒虚警模块提供目标能量和目标的位置信息、噪声功率等信息。仿真系统中各个内部模块之间的信息交互如图3所示。
2 子系统的建模与仿真
2.1目标特性模拟模块
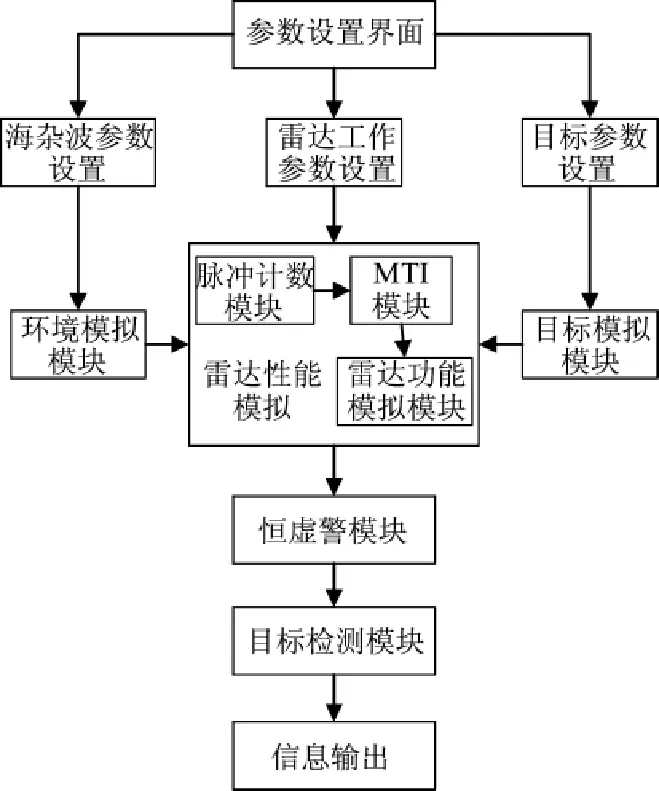
图3无人机警戒雷达仿真系统内部模块交互图
无人机警戒雷达仿真系统的目标特性模拟模块主要实现目标运动特性的模拟和目标RCS计算。前者实时计算和输出目标的各个运动参数,后者能够根据Swerling(斯威林)起伏模型,产生服从特定分布的目标RCS。
目标的运动特性模型中,假设目标的运动形式有匀速直线运动和匀速圆周运动两种,在直角坐标系中建立相应的运动模型,然后根据坐标转换矩阵,将直角坐标转换为球坐标,即可得到相应的距离、俯仰角和方位信息。
目标RCS计算模型中常用的点目标起伏模型是Swerling模型,将起伏分为4种类型,分别为指数分布快、慢起伏类型和χ2分布快、慢起伏类型。指数分布起伏类型目标的RCS服从如下负指数分布,其中为目标的平均RCS:

χ2分布起伏类型目标的RCS服从分布:

根据目标的平均RCS和Swerling类型,可用如下方法产生出目标的RCS:判断目标Swerling类型,若为0,则σ=,即目标不起伏;若为1或2,则若为3或4,则


u、u1和u2为[0,1]均匀分布的随机数。
根据目标Swerling类型和平均RCS,选用相应随机数产生方法,就可得到目标的RCS。对有起伏的目标,生成的RCS均为服从特定分布的数组,从该数组中间依次取值,作为RCS输出。仿真过程中,调用目标运动模型时,根据目标初始位置、速度、Swerling类型等信息,实时输出目标当前位置和相应RCS。
2.2环境特性模拟模块
环境特性模拟模块用来生成警戒雷达工作的环境,系统中只考虑海杂波和气象杂波,根据附近海况、降雨率及警戒雷达性能参数,计算并输出海杂波区域矩阵和雨杂波区域矩阵。
海杂波与海面的几何形状、粗糙度、物理特性、海浪运动方向和雷达波束的相对位置等有关,该模型根据海况、警戒雷达参数输出海杂波分布区域及其RCS。
①海杂波区域:海杂波的距离范围受雷达探测距离的限制,主要由其天线的高度决定:

Rh为雷达探测距离,ha为天线高度,θ为雷达下视角。雷达探测范围决定了海杂波矩阵包含的分辨单元数,海杂波覆盖视距范围内的0~2π区域。
②确定海杂波矩阵维度:若雷达距离为cτ/2,方位为θb,则杂波区域覆盖的分辨单元数M×N为
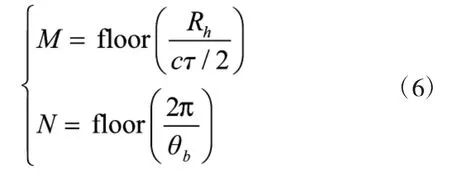
floor()为向下取整函数。杂波矩阵的每一行代表距离相同而方位不同的分辨单元,每一列代表方位相同而距离不同的分辨单元。
③单位分辨单元内的海杂波平均RCS:

其中τ为雷达发射信号脉宽,θb为3 dB水平波束宽度,ha为天线高度,KB为蒲福风级,f为雷达工作频率。
海杂波回波幅度是有起伏的。海杂波回波起伏服从对数-正态分布,故其概率密度函数为

其中μ为lnx的均值,σ为标准差。根据杂波的分布特性,可以生成相应的随机数作为海杂波的RCS。
2.3雷达性能模块
雷达性能模拟模块实现的功能主要包括以下几个方面:
①雷达天线仿真功能:主要实现警戒雷达收、发天线的天线图、天线扫描功能,并计算俯仰、水平方向天线方向图,调制参数和累积脉冲数。
②雷达信号仿真功能:主要实现警戒雷达发射信号、目标回波信号、接收机噪声、雷达接收信号、回波信号处理的功能仿真,通过建立相应数学模型实现雷达信号在不同阶段的处理功能。
③雷达系统功能仿真:主要实现目标回波功率计算、雷达探测能力计算、接收机噪声计算、动目标检测与显示(MTD/MTI)、目标一维高分辨成像(HRRP)、目标二维正侧视成像(SAR成像)功能。
④雷达信号处理功能:一方面,在上述功能实现的基础上,根据仿真场景设计生成目标信息,包括目标点迹即目标的位置、速度、相对于无人机的角度(方位/俯仰角),目标航迹,目标成像以及所有目标的战场态势信息;另一方面,接收、处理来自指挥控制台的导航类、目标类及相应的控制类信息,生成目标的航迹、运动参数和正侧视图像等。
2.3.1天线波束的增益模型
雷达的天线波束形状为高斯型,其天线主瓣方向图为


G(θ)=ηGmax·f(θ)(11)
式中,η为天线效率,通常取0.65,Gmax为天线增益的最大值。
2.3.2天线扫描模型
天线采用扇扫方式,即从-165°~165°间来回扫描,反复进行。这种方式在天线垂直方向上有较宽的覆盖,而在天线水平方向上的波束角比较窄。
2.3.3雷达探测模型
由目标的RCS以及雷达性能参数,可以计算出接收目标信号能量。在不考虑系统损耗、大气波导传输损耗、人为干扰等因素影响的情况下,警戒雷达接收到的目标回波功率:

式中,λ=c/f为雷达工作波长,Pt为雷达发射脉冲峰值功率,τ为雷达发射脉冲宽度,σt为目标RCS,G (θ)为给定方向天线增益,GI为信号处理增益。
杂波能量的计算与目标回波能量类似,计算经过处理后的杂波能量:
式中σc为杂波的RCS。
警戒雷达的噪声功率计算公式为:
Pn=kTsBn(14)
k为波尔斯曼常数,即1.38×10-23瓦秒/°K,Ts为接收机噪声温度,Bn为接收机检波前滤波器噪声带宽。
2.3.4脉冲积累数计算模型
积累脉冲数通常由天线波束的扫描速度和波束在搜索平面上的宽度确定。在方位扫描雷达中,积累脉冲数采用如下公式计算:

其中,PRF为雷达脉冲重复频率(Hz),RPM为雷达天线转速(r/min)。
2.3.5恒虚警模型
恒虚警模型中,根据输入的目标和海杂波信息,输出杂波图矩阵,用于目标检测。每一个杂波图单元都被前几次扫描落在其边界内(或附近)的雷达回波(或剩余杂波)不断更新。为保存记忆,通常使用以下形式的简单递归滤波器来更新:

yi-1为上一时刻杂波图幅度,yi为当前杂波图幅度,xi是在当前扫描时的雷达输出,常数α决定递归滤波器的存储量。
2.3.6目标检测模型
目标检测模块中,根据目标、杂波的能量和位置信息,计算检测结果。由杂波图矩阵和恒虚警门限系数生成判决门限,用当前的信号总功率(包括目标、杂波、噪声)和门限进行比较,大于门限则输出雷达视频,否则不输出。
根据输出xi检测目标的判据是:
xi≥KTyi-1(17)
其中,门限常数kT按所需的虚警率选择。
3 警戒雷达模拟器的仿真实现
警戒雷达模拟器主要有两种工作方式:遥控方式和本机方式。在遥控方式下,警戒雷达模拟器利用以太网总线实现与指挥控制台的信息交互,仿真开始前,接收来自指挥控制台的仿真参数设置。在仿真过程中,将雷达探测到的目标信息实时发送给指挥控制台,便于指挥控制台实施数据分析。在本机工作方式下,通过仿真操作人员设置无人机的初始位置、导航数据、控制命令和航路点信息来完成无人机运动的仿真,设置目标、环境信息,经过警戒雷达模拟器的仿真运算,将目标信息、战场态势信息和状态信息通过以太网总线发送给指挥控制台,以完成警戒雷达模拟器与指挥控制台之间的信息交互。
警戒雷达模拟器采用基于VC++与MATLAB相结合的混合编程方式,软件框架采用VC++的MFC类库,利用VC++的文档/视图框架结构,从而便于整个软件的管理和维护。利用MATLAB实现雷达功能模拟中的目标成像功能,即HRRP成像和SAR成像,将MATLAB的文件编译成动态链接库,并与MFC的视图类结合进行图形的可视化显示。仿真实现后的无人机对海警戒雷达模拟器的总体运行效果如图4所示。
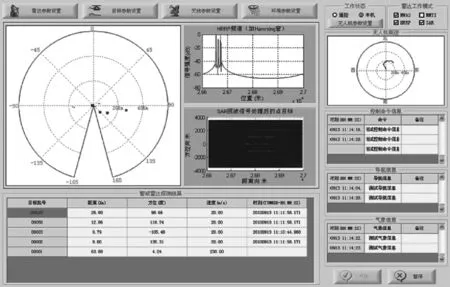
图4无人机警戒雷达仿真系统主操作界面
4 结论
无人机警戒雷达仿真系统以无人机装备的对海警戒雷达载荷为原型,主要实现了对海面静止和移动目标的探测、感知、识别、成像等功能,并能完成与指挥控制台之间的信息交互。本文建立了由数据/控制接口、人机界面和多个算法模块组成的无人机警戒雷达仿真系统。系统采用模块化方法对目标运动特性、环境特性和警戒雷达的功能特性进行了仿真,通过测试实现了仿真系统与指挥控制台之间的信息交互,并建立了简单合理的人机操纵界面。该仿真系统模拟实现了现实装备中的此类载荷的基本功能,从数字化仿真层面完成了无人机警戒雷达载荷功能的再现与性能测试。
参考文献:
[1]康凤举,杨惠珍,高立娥.现代仿真技术与应用[M].北京:国防工业出版社. 2008.
[2]李娟,石春和,闫云斌.干扰条件下警戒雷达功能仿真研究[J].现代电子技术,2009(7):38-40.
[3]李相民,张安,张斌.压制性干扰对地面警戒雷达的效能影响分析[J].电光与控制,2006,13(1):1-3.
[4]闫云斌,石春和,李娟,等.警戒雷达情报数据模拟器的设计与实现[J].火力与指挥控制,2009,34(12):128-130.
[5]王明明.两坐标警戒雷达模拟器设计[J].雷达与电子,2008(3):35-37.
[6]刘志高,徐向东,刘斌.某低空警戒雷达海杂波数据的统计特性分析[J].空军雷达学院学报,2004,18(4):1-3.
[7]BILLINGSLEY J B,FARINA A. Statistical analysis of measured radar ground clutter data[J]. IEEE Transactions on A&E System,1999,35(2):37-41.
[8]ZHU S H.The periscope detection against the background of strong sea clutters[J].Modem Radar,2008,22(4):43-47.
[9]王峰,谢燕敏,张毅.数据融合技术在机载警戒雷达中的应用[J].现代雷达,2010,32(2):49-51.
Research on Modeling and Simulation of UAV Warning Radar
ZHANG Yao-zhong,ZHANG Jian-dong,SHI Guo-qing
(Electronic Information College,Northwestern Polytechnical University,Xi’an 710129,China)
Abstract:For the stationary and moving target detection,awareness,recognition,imaging and other issues in the sea environment,the simulation system of UAV warning radar which is composed of the data/control interface,human-machine interface and other function algorithm modules is designed. In the simulation system modular approach for the target movement characteristics,environmental characteristics and feature functions of the warning radar,which mainly used to simulating the basic functions of the real equipment are adopted. The feature function and performance testing of UAV warning radar from the digital level is realized. Our simulation system can interchange information with the command console via the Ethernet bus. At the same time,the system has good scalability,which can be used as part of the whole combat simulation system.
Key words:warning radar,UCAV,modeling and simulation,RCS
作者简介:张耀中(1974-),男,河南舞阳人,硕士生导师。研究方向:复杂系统的建模与仿真。
*基金项目:航空科学基金资助项目(20138053038)
收稿日期:2015-01-11修回日期:2015-02-26
文章编号:1002-0640(2016)02-0093-04
中图分类号:TP391
文献标识码:A